

逃生机器人的制作
电子说
描述
步骤1:主要概念&动机
正如引言中所解释的,这个项目的主要概念是创建和构建一个半自动机器人,首先由逃脱游戏的玩家控制,然后能够控制从球员那里回来。
原则如下:
想象一下你被锁在一个房间里一群朋友。离开房间的唯一可能性是找到一把钥匙。钥匙隐藏在脚下的迷宫中,位于黑暗的中间楼层。要获得该密钥,您拥有三件事:遥控器,地图和屏幕。遥控器可以通过解决遥控器现有控制按钮上想象的谜语来控制已经在中间楼层的汽车。一旦你解决了这个谜题,汽车就会打开(参见第5步:编码 - 主要功能名为‘loop()’),你可以在给定地图的帮助下开始引导汽车穿过迷宫。由于固定在机器人前方的摄像头,屏幕可以实时显示汽车所看到的内容,从而帮助您查看轨迹,更重要的是帮助您查看钥匙。一旦你拿到了钥匙,感谢机器人底部的磁铁,一旦你到达了迷宫的尽头,你就可以拿起钥匙,逃离你被锁的房间。
因此机器人的主要组成部分是:
要在遥控器上解决的谜语
玩家用遥控器控制机器人
基于摄像机实时拍摄视频的控制显示
因为在这样的游戏中主要的限制是时间(在大多数逃脱游戏中你有30分钟到1小时才能成功),一个传感器连接并连接在机器人的底部,这样如果你作为玩家,超过给定的时间(在我们的情况下是30分钟),机器人将控制权拿回来并自己完成parcours,这样你在游戏计时器关闭之前有机会获得房间的钥匙(在我们的情况下是1小时)
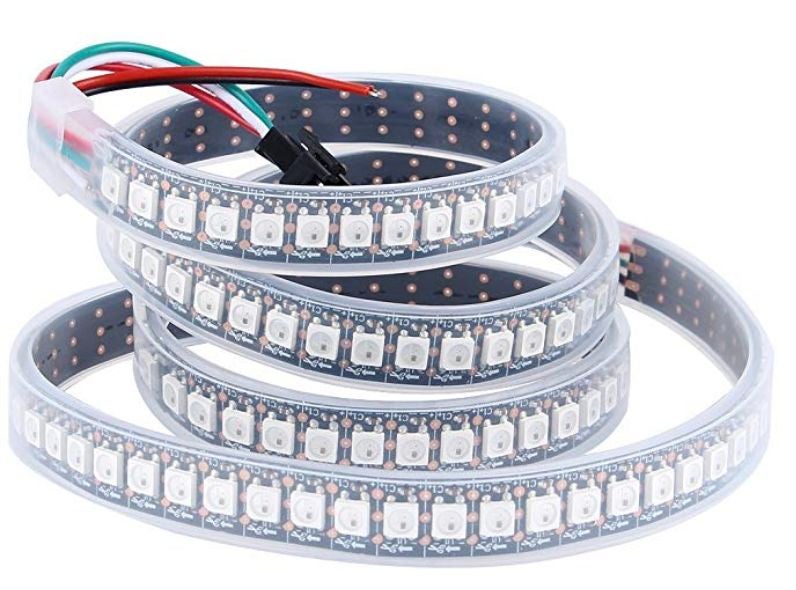
此外,由于汽车处于一个完全黑暗的房间,LED被固定在离传感器不远的地方,以帮助它从地面读取信号。
这个小组项目背后的愿望是我们自己的基础关于市场上已有的东西,通过添加个人价值进行修改,并能够在一些有趣和互动的领域中使用它。事实上,在与比利时布鲁塞尔成功的Escape Room接触后,我们发现逃脱游戏不仅越来越有名,而且他们经常缺乏交互性而且客户抱怨不够“ “游戏。
因此,我们试图想出一个符合既定要求的机器人,同时邀请玩家真正参与游戏。
以下是机器人中发生情况的摘要:
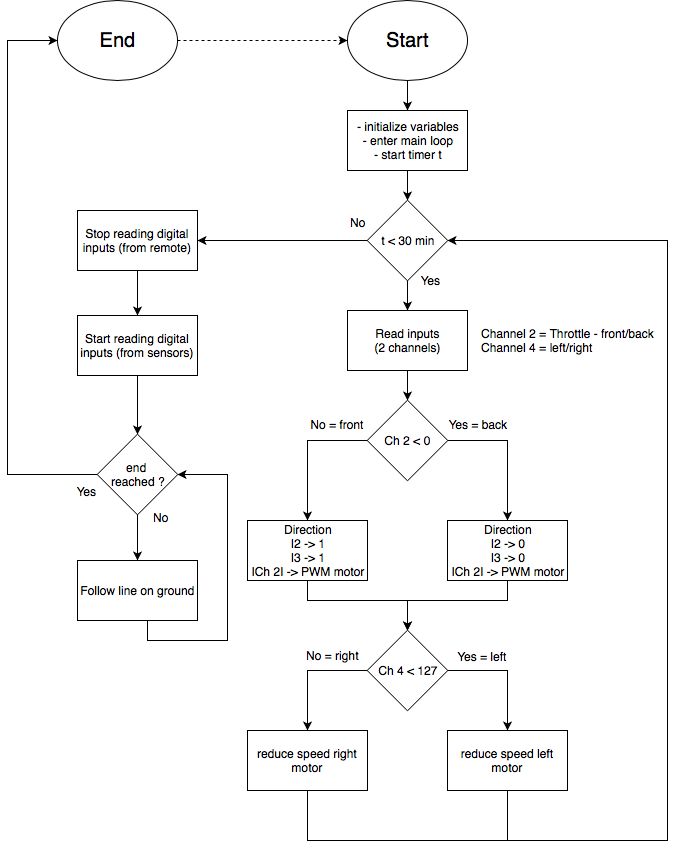
- 非自治部分:遥控器通过接收器链接到Arduino。玩家控制遥控器,因此控制控制电机的Arduino。 Arduino在游戏开始前打开,但当玩家解决遥控器上的谜语时,它会进入主要功能。 IR无线摄像头已经打开(当打开/关闭时,“整体”(由Arduino控制)同时打开)。玩家用遥控器引导汽车:他们控制速度和方向(参见第5步:流程图)。当输入主功能时启动的计时器等于30分钟时,控制器的控制将被禁用。
- 自治部件:然后通过以下方式管理控件: Arduino。 30分钟后,红外线跟踪器传感器开始跟随地面上的一条线完成parcours。
步骤2:材料&工具




材料
电子零件
微控制器:
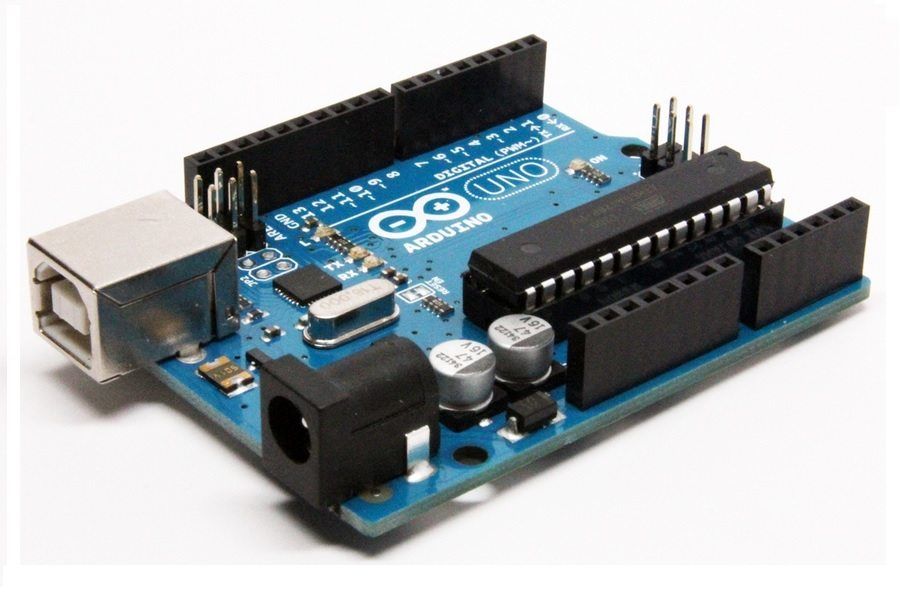
Arduino UNO
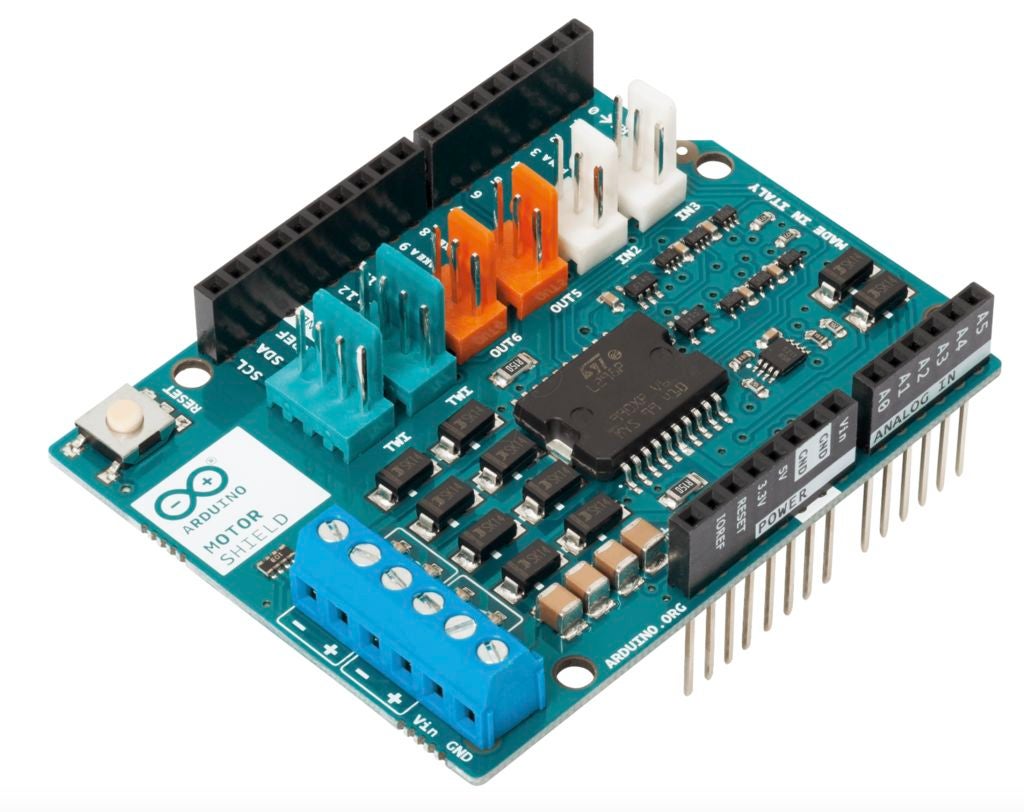
Arduino电机护罩 - Reichelt - 22.52€
传感器:
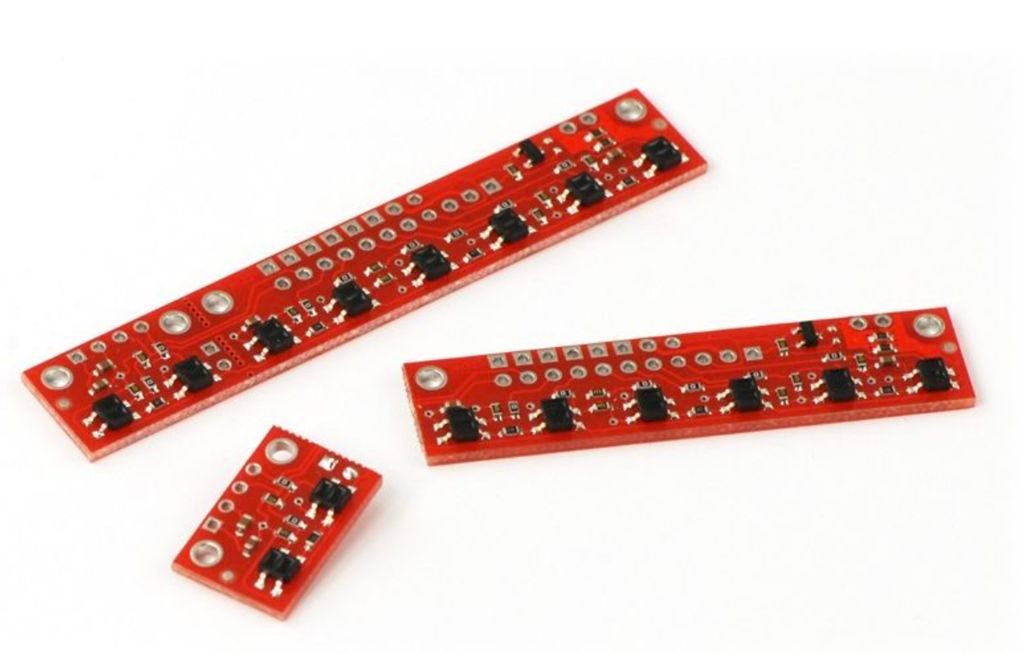
红外线跟踪器 - Mc Hobby - 16.54€
电池:
6x 1.5V电池
其他:
Protoboard
无线摄像头(接收器) - Banggood - 21.63€
遥控器(发射器+接收器) - 亚马逊 - 36.99€
充电底座(Qi接收器) - Reichelt - 22.33€(未使用 - 参见第7步:结论)
LED - 亚马逊 - 23.60€
机械部件
DIY汽车底盘套件 - 亚马逊 - 14.99€
使用:
1x开关
1x脚轮
2x车轮
2x直流电机
1x电池持有人
未使用:
1x汽车底盘
4x M3 * 30螺丝
4x L12垫片
4x紧固件
8x M3 * 6螺丝
M3螺母
磁铁 - 亚马逊 - 9.99€
Bo lts,螺母,螺钉
M2 * 20
M3 * 12
M4 * 40
M12 * 30
所有相应的坚果
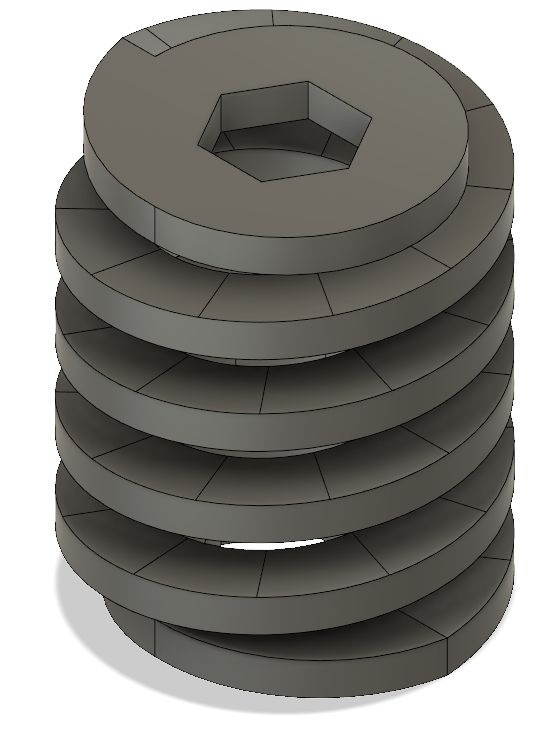
3D打印件:
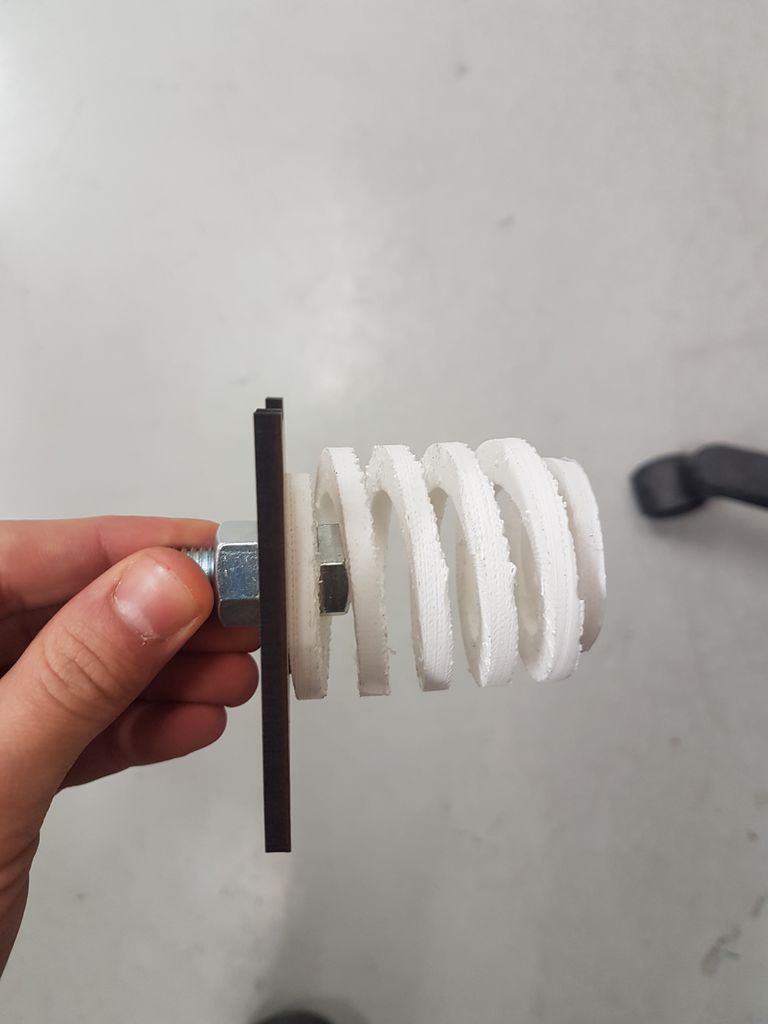
5x弹簧
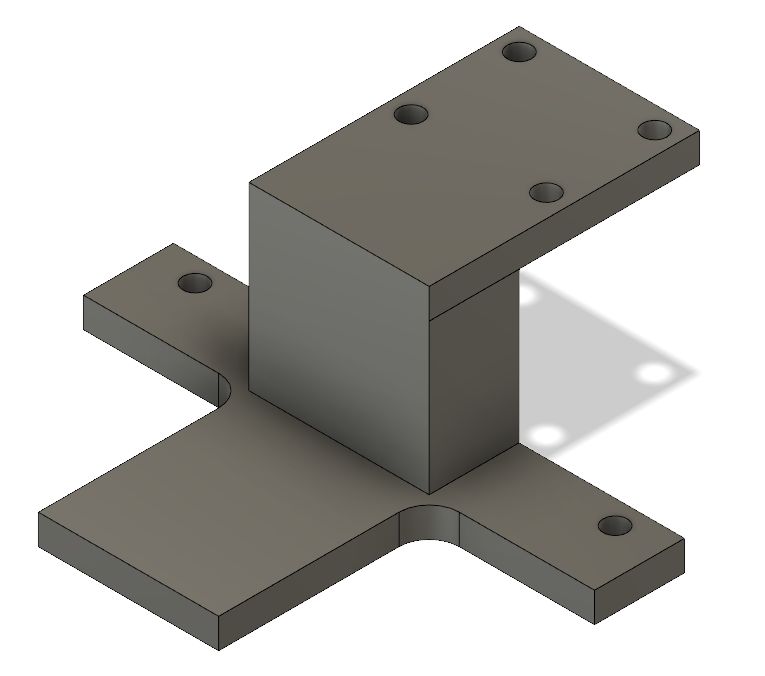
2x电机固定
1x L形状跟踪器固定
激光切割件:
2x圆形平板
5x矩形小平板
工具
机器:
3D打印机
激光切割机
螺丝刀
手动钻机
Lime
电子焊料
步骤3 :(激光)切割& (3D)打印
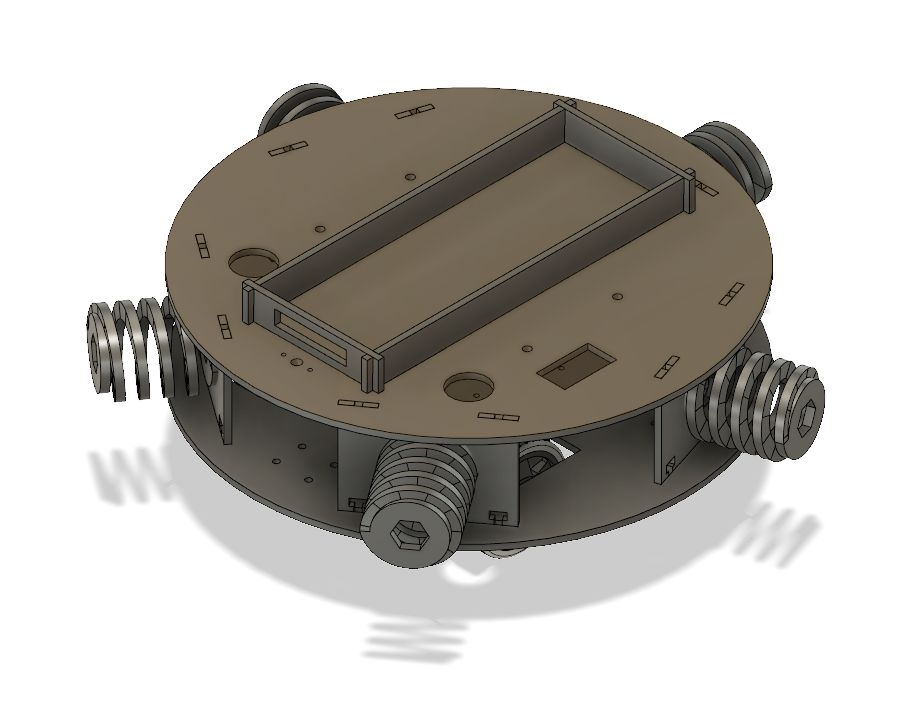
我们使用激光切割和3D打印技术来获取我们的一些组件。
您可以在中找到所有CAD文件文件.step下面。
激光切割机
机器人的两个主要固定件是激光切割的:
(材料= MDF纸板4mm)
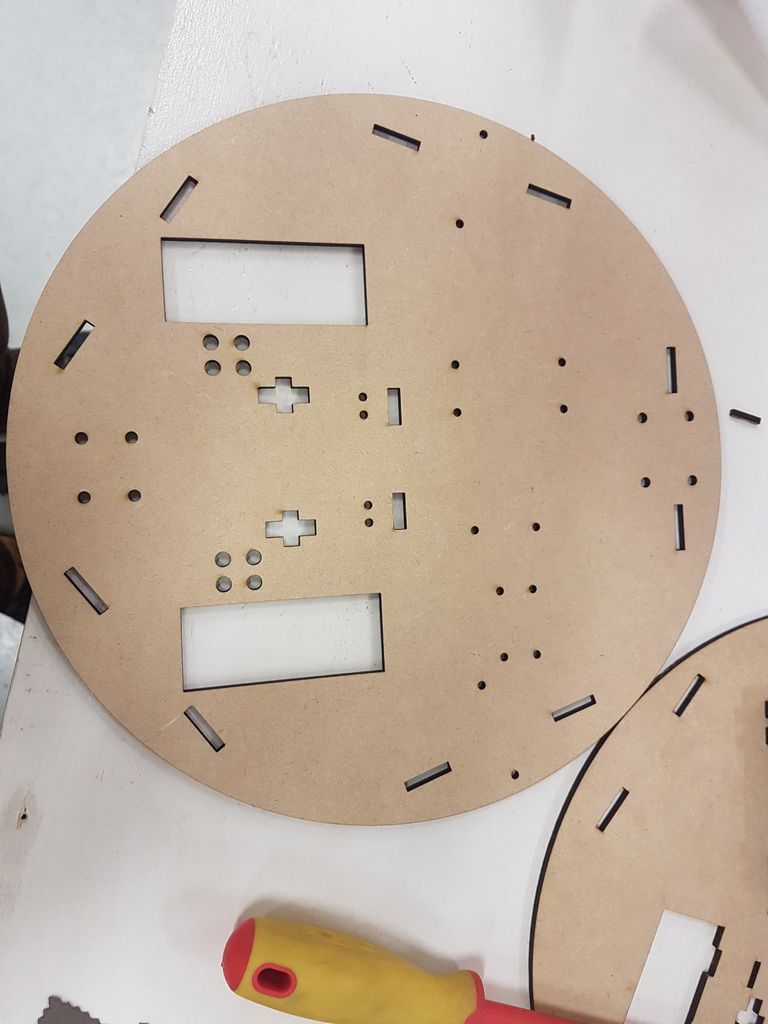
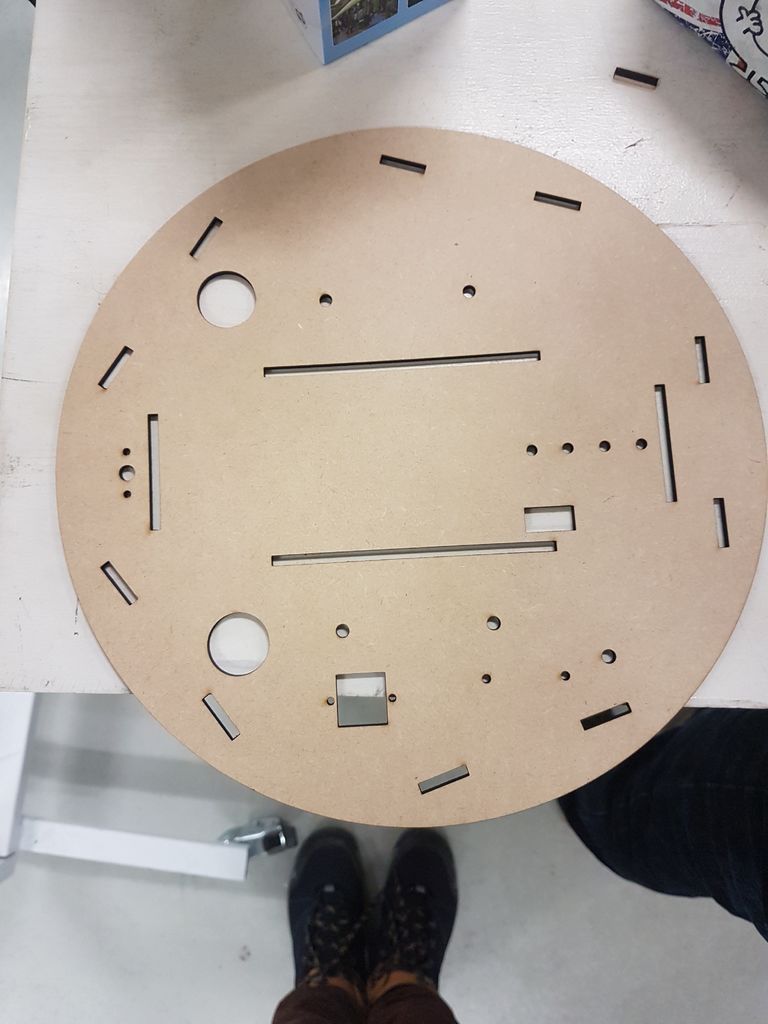
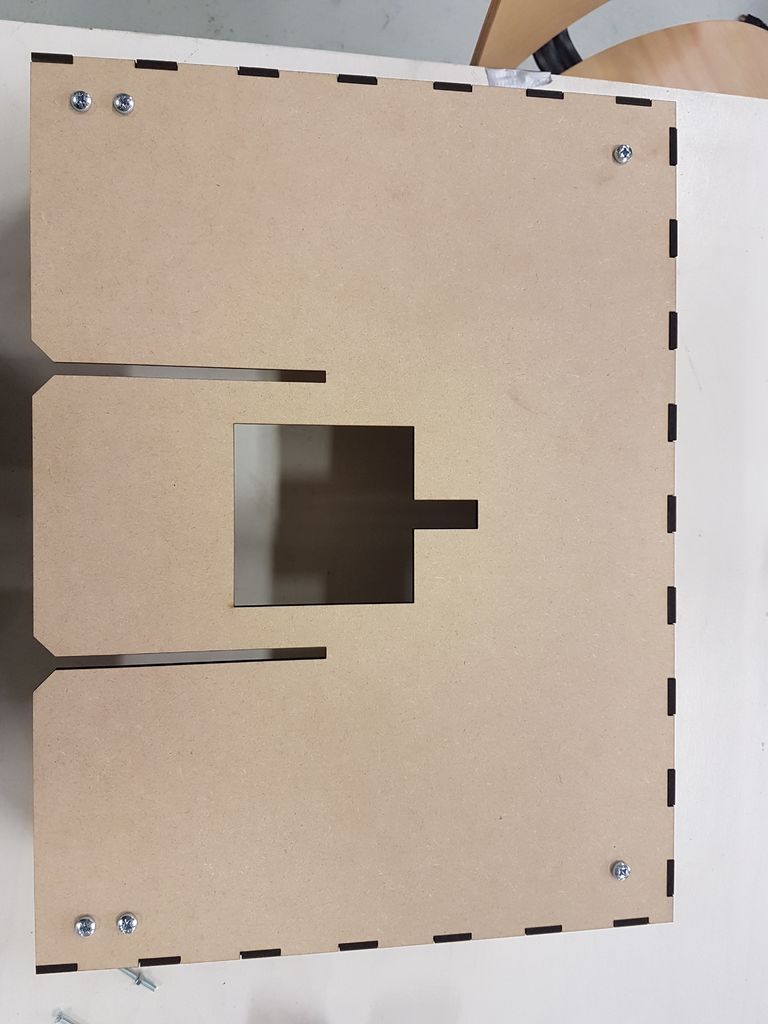
- 2个圆形平盘,用于制作机器人的基础(或底盘)
- 两个圆盘上的几个孔,以容纳机械和电子元件
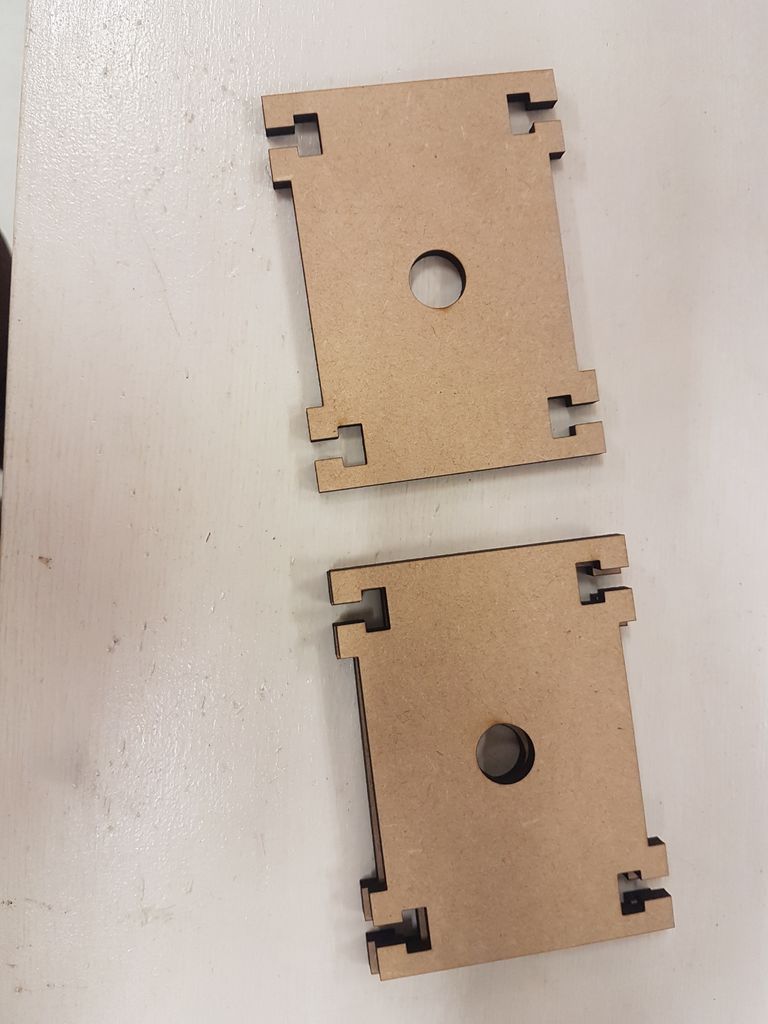
- 5个矩形小板,用于固定两个底板之间的弹簧
3D打印机(Ultimakers& Prusa)
机器人的不同元素是3D打印的,为了同时赋予它们抵抗力和灵活性:
(材料= PLA)
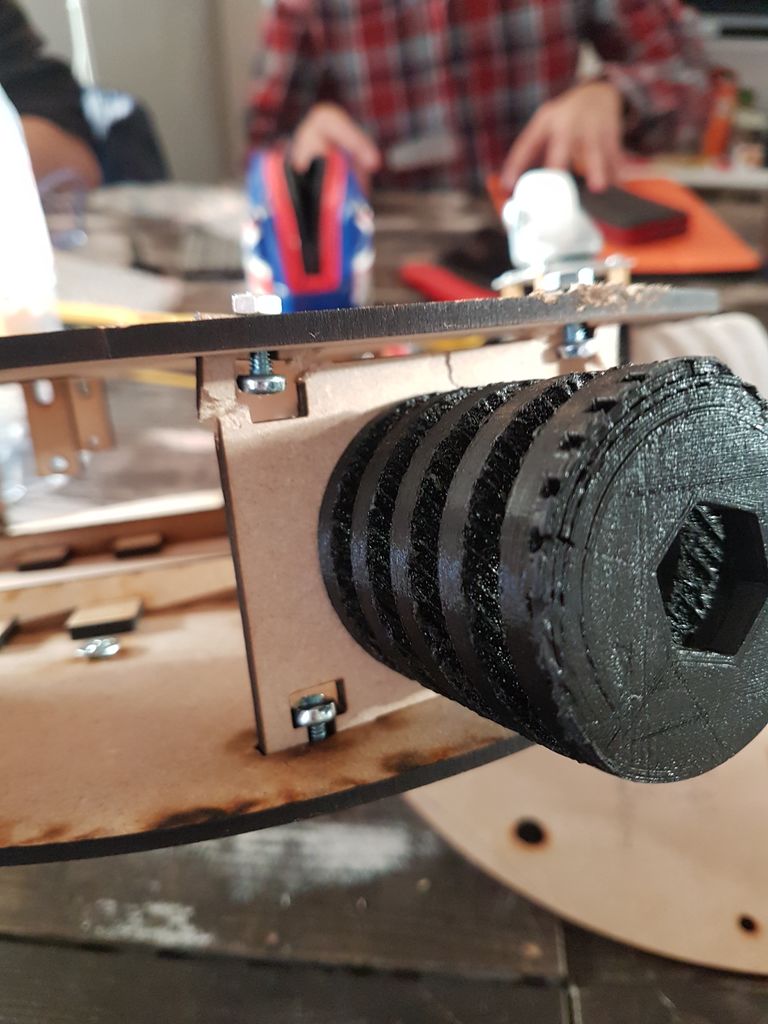
- 5个弹簧:注意弹簧是作为块打印的,所以有必要将它们归档给它们‘弹簧’形状!
- 用于固定电机的2个矩形空心部件
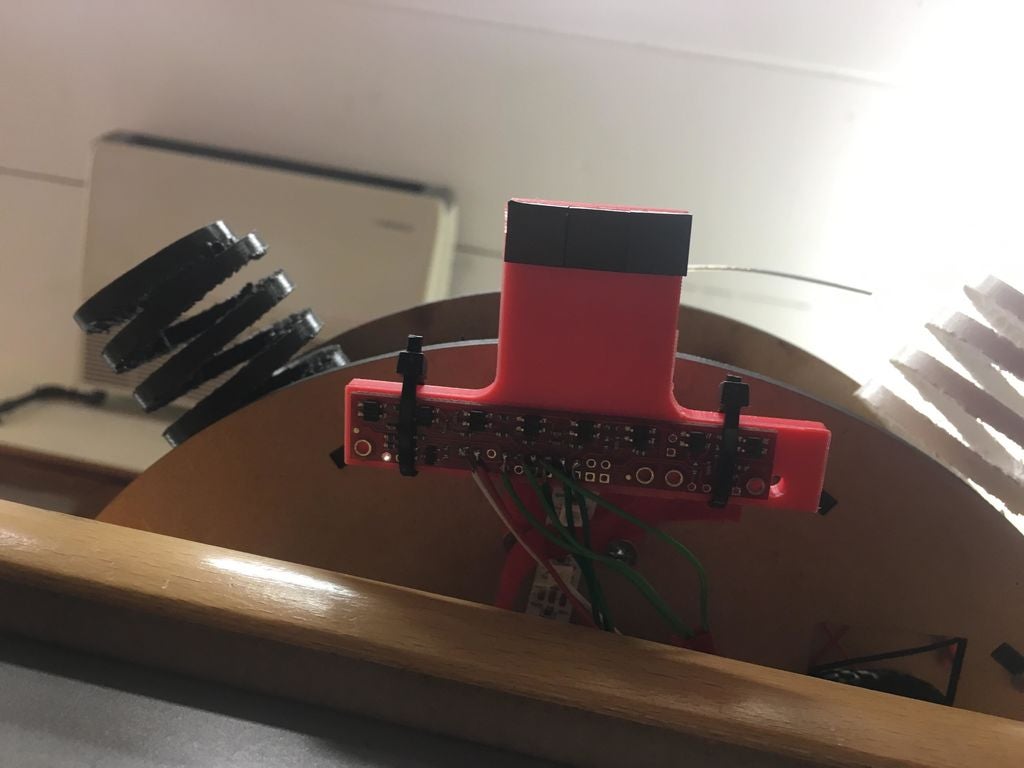
- 用于容纳线跟踪器的L形件
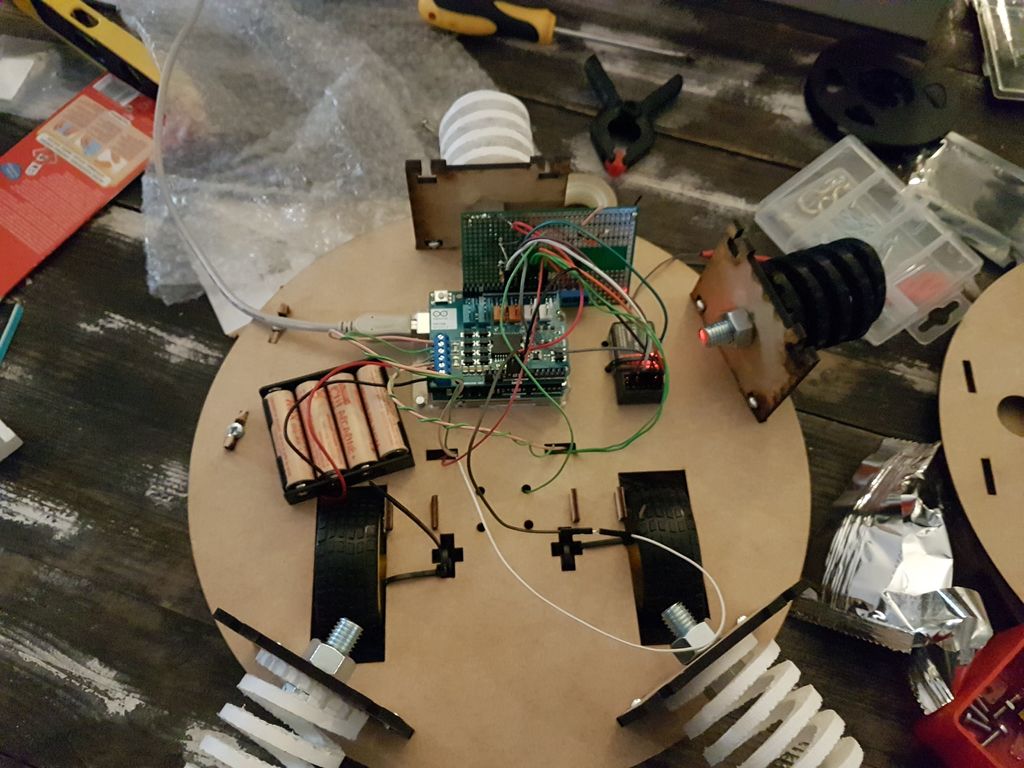
步骤4:组装电子设备
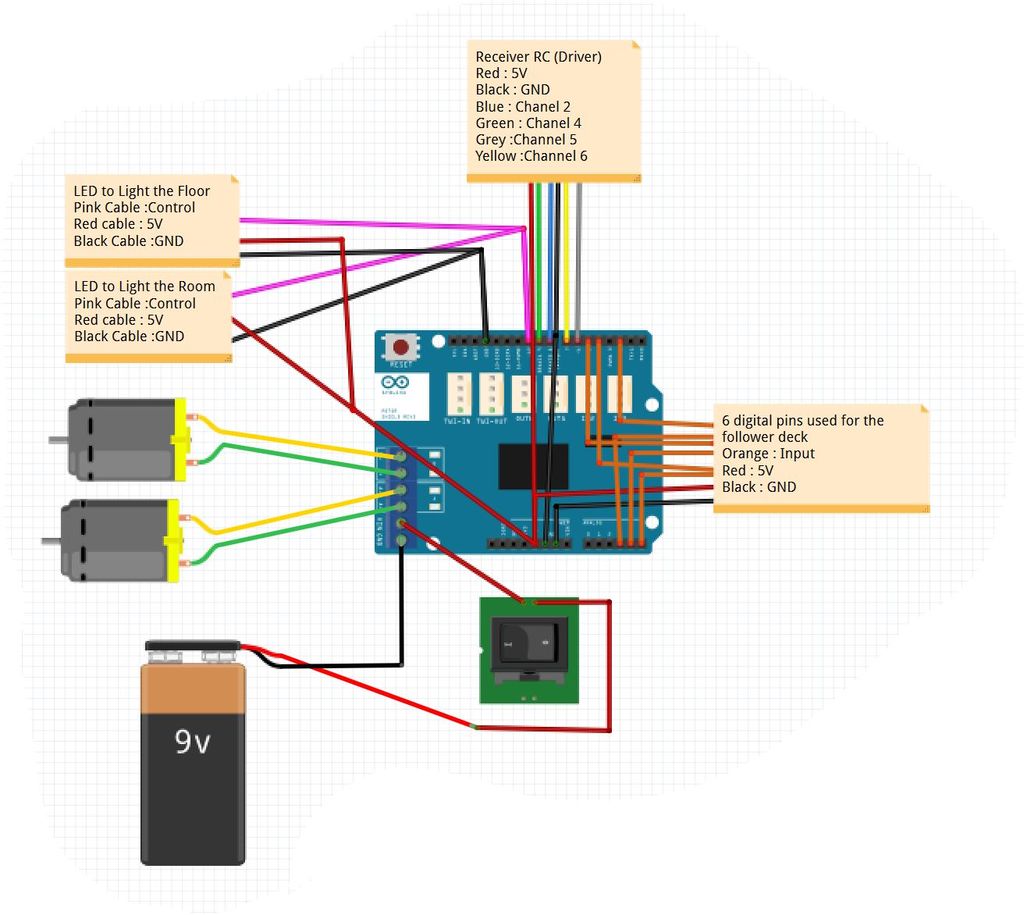
正如您在电子草图中看到的那样,Arduino是预期的中心部分电气部分。
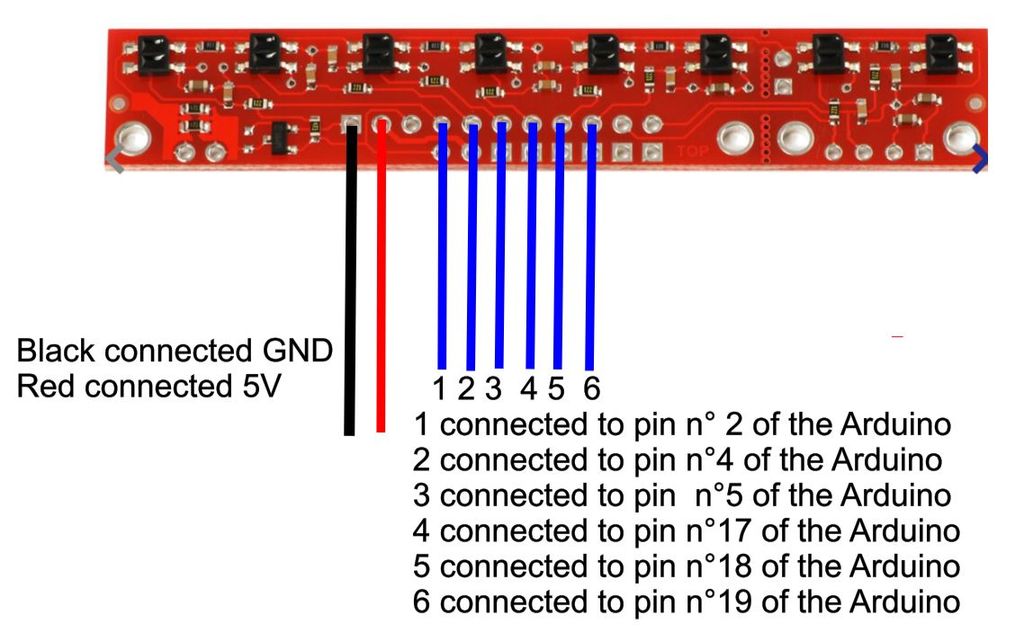
Connexion Arduino - 线跟踪器:
(参见相应的跟随者草图)
Connexion Arduino - Motors:
(参见相应的一般草图 - 左)
Connexion Arduino - 遥控接收器:
(参见相应的一般草图)
Connexion Arduino - LED:
(参见相应的一般草图 - 左)
使用一个protoboard来增加5V和GND端口的数量并方便所有连接。
这一步不是最简单的一步,因为它需要满足上面强调的要求(自主性,用户友好性,鲁棒性,安全性),并且威廉希尔官方网站 需要特别注意和预防。
步骤5:编码
编码部分涉及Arduino,电机,遥控器,线路跟踪器和LED。
您可以在代码中找到:
1。变量声明:
RC接收器使用的引脚声明
直流电机使用的引脚声明
使用的引脚声明by LED
函数‘Riddle’使用的变量声明
IR传感器使用的引脚声明
IR Deck使用的变量声明
2。初始化功能:初始化不同的引脚和LED
功能‘setup()’
3。电机功能:
功能‘turn_left()’
功能‘turn_right()’
功能‘CaliRobot()’
4。功能线跟踪器:在机器人的半自动行为中使用先前的‘CaliRobot()’函数
功能‘跟随者()’
5。遥控器(谜语)的功能:包含呈现给玩家的谜语的正确解决方案
功能‘谜语()’
6。主循环功能:一旦定时器超过30,就可以让玩家控制汽车一旦找到解决方案,启动定时器,并将输入从数字(遥控)切换到数字(自主)分钟
函数‘loop()’
代码的主要过程在上面的流程图中解释,主要功能突出显示。
您还可以在.ino附件中找到该项目的完整代码,该文件是使用开发接口Arduino IDE编写的。
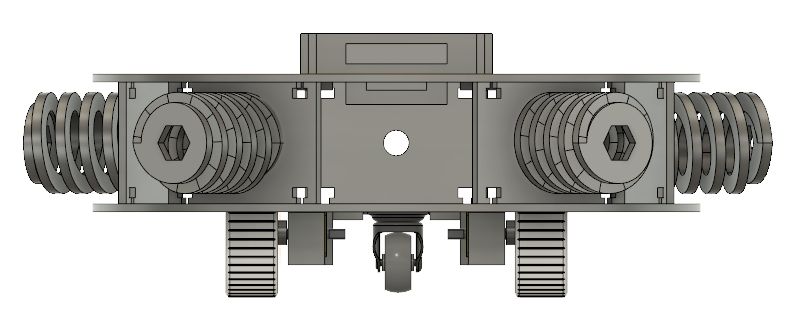
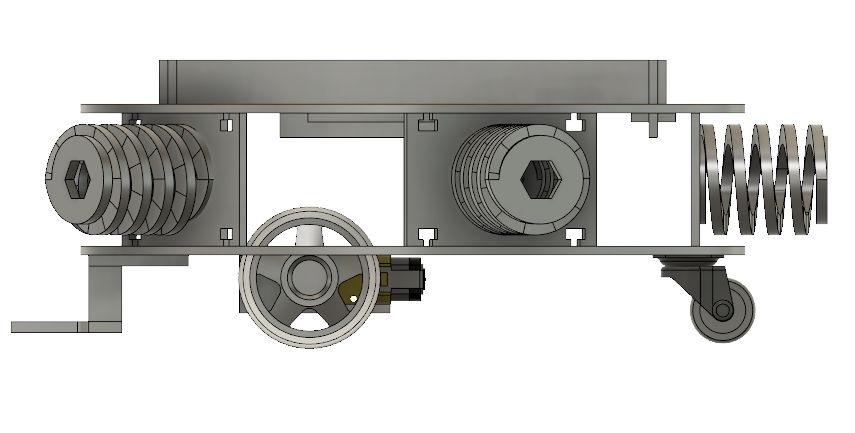
步骤6:组装
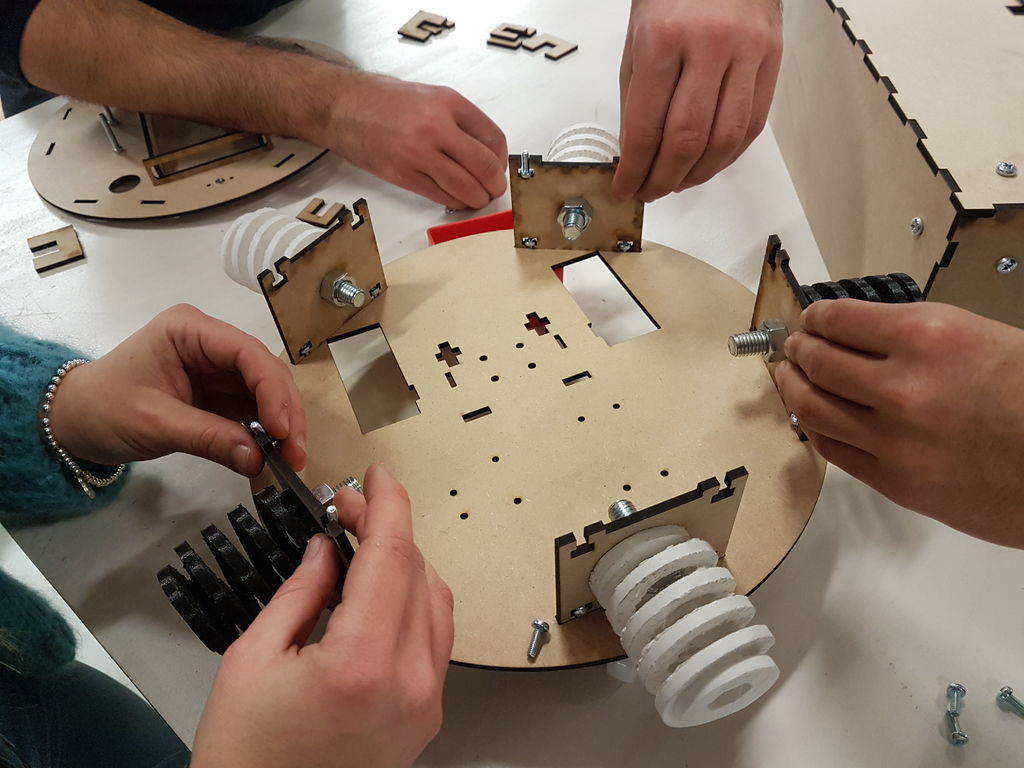



我们有了激光切割,3D打印和准备好的所有组件:我们可以组装整个组件!
首先,我们将激光切割矩形板上的3D打印弹簧用直径等于直径的螺栓固定弹簧内的孔。
一旦将5个弹簧固定在它们的小板上,我们就可以用较小的螺栓将后者固定在下机箱板上。
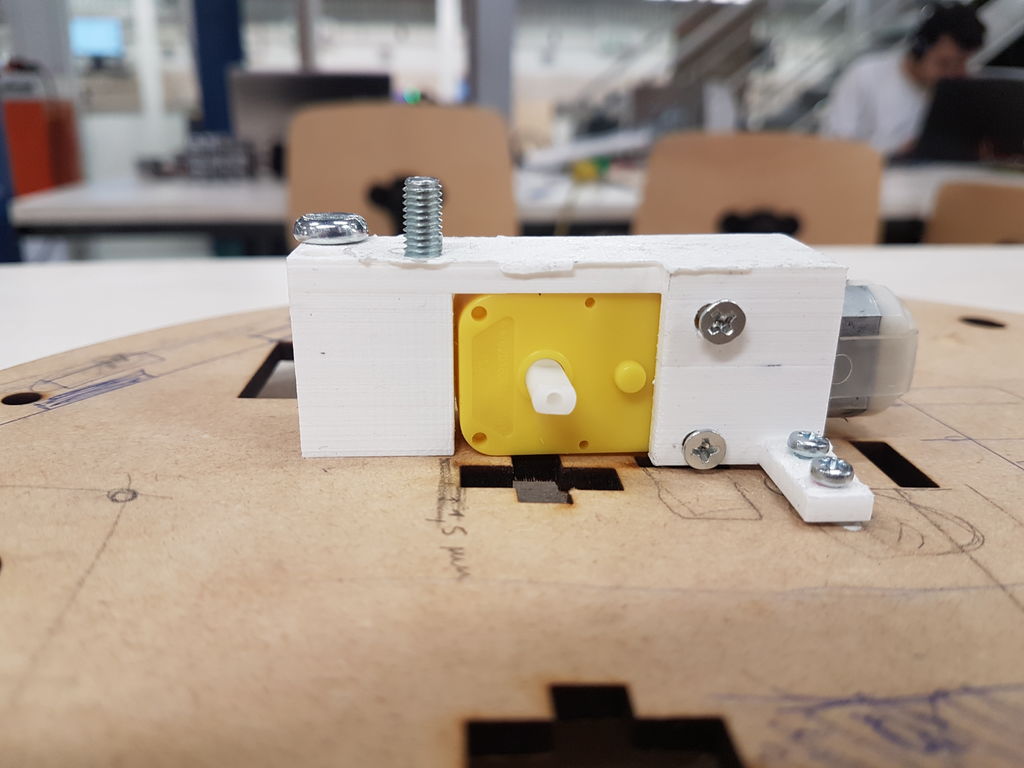
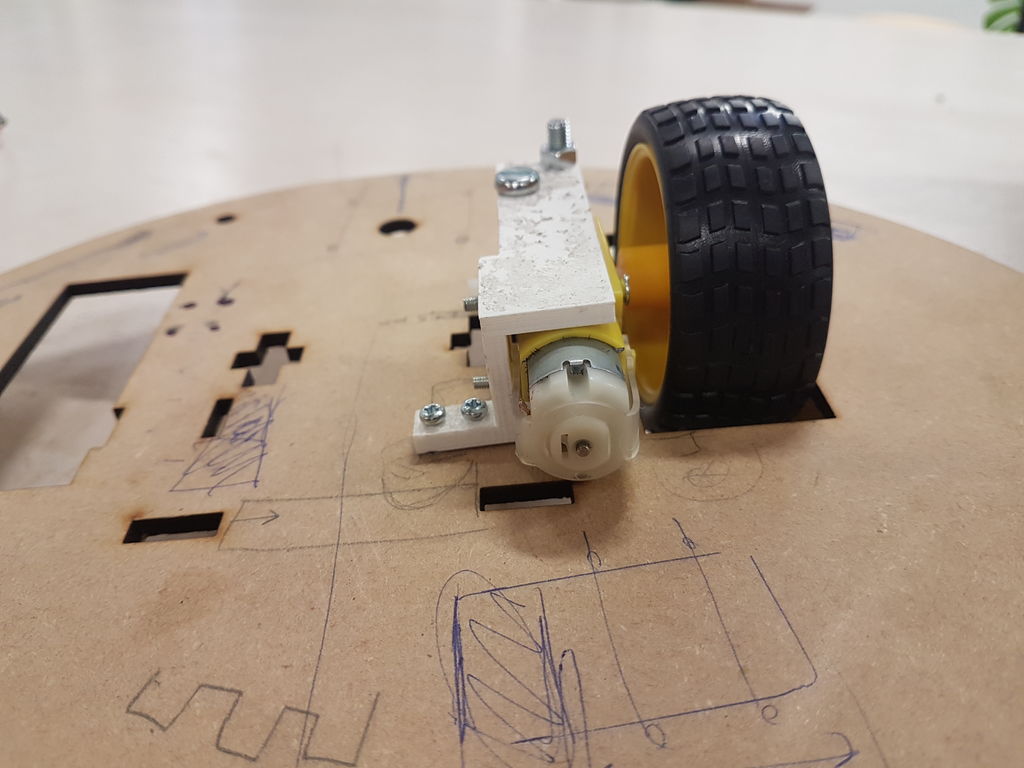
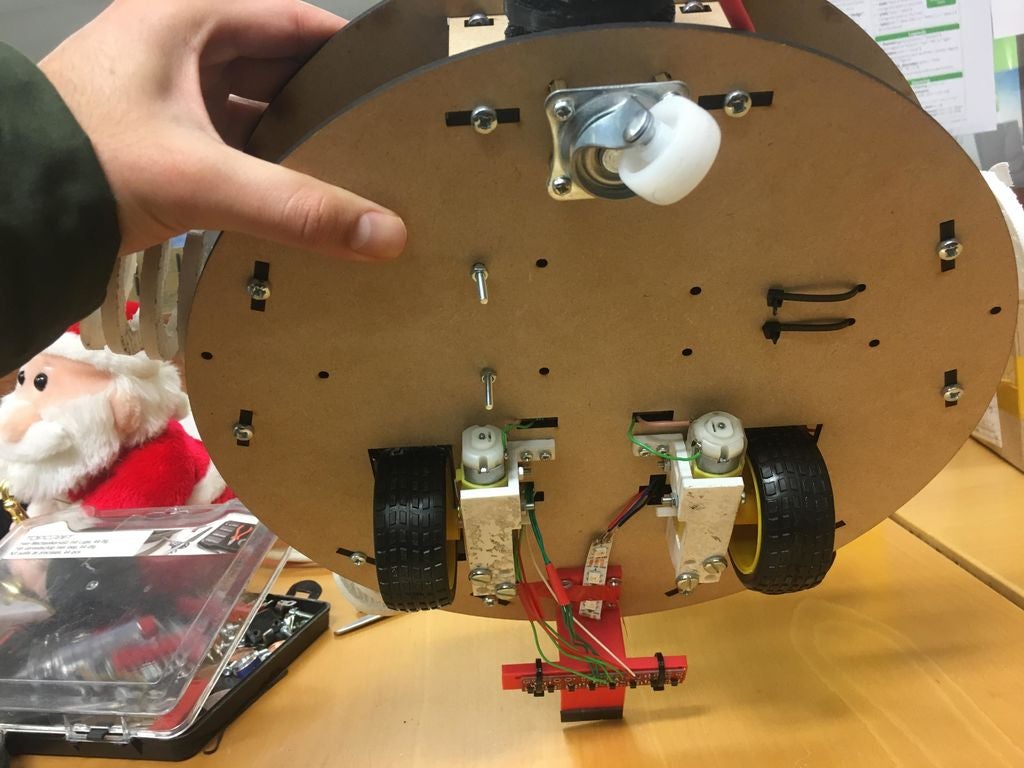
其次,我们可以将电机固定在3D打印的电机固定装置上,下机箱板带有小螺栓。
一旦固定完毕,我们就可以将2个车轮固定在下机箱板孔内的电机上。
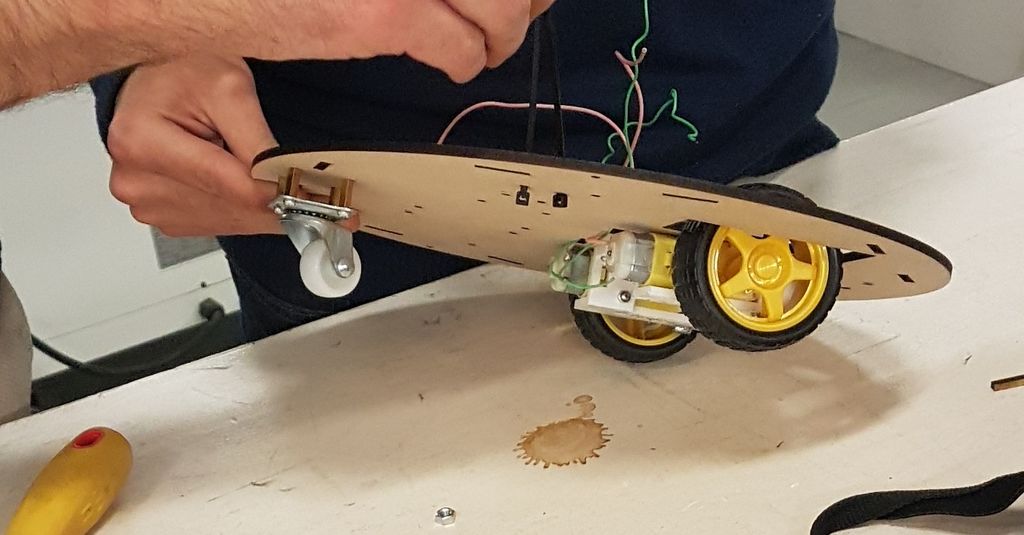
第三,我们可以使用小螺栓固定脚轮下方的脚轮,使下机箱板处于水平位置
我们现在可以修复所有其他组件
下机箱盘子:
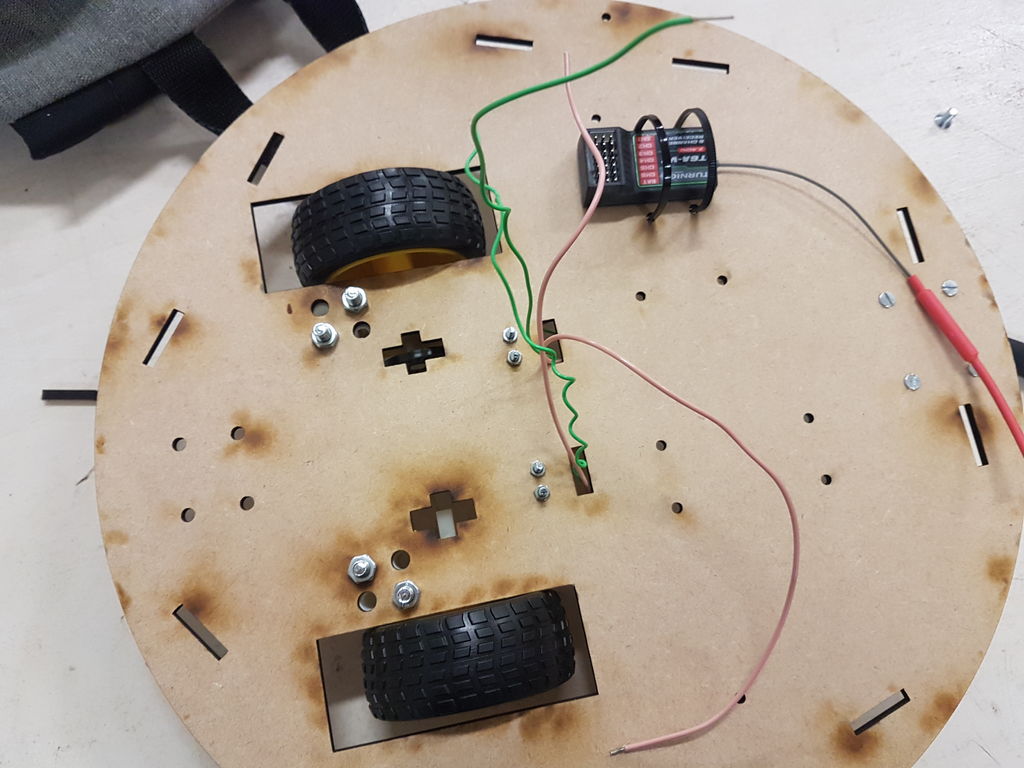
下面:
线路跟踪器
LED
结束:
遥控器接收器
Arduino&电机护罩
LED
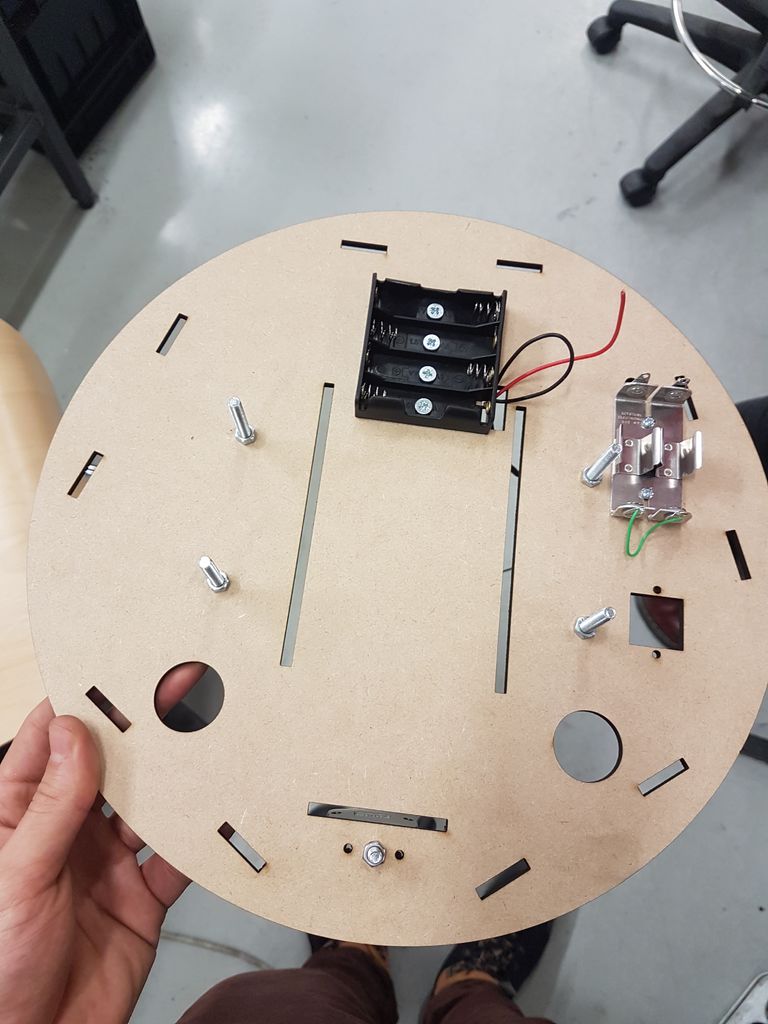
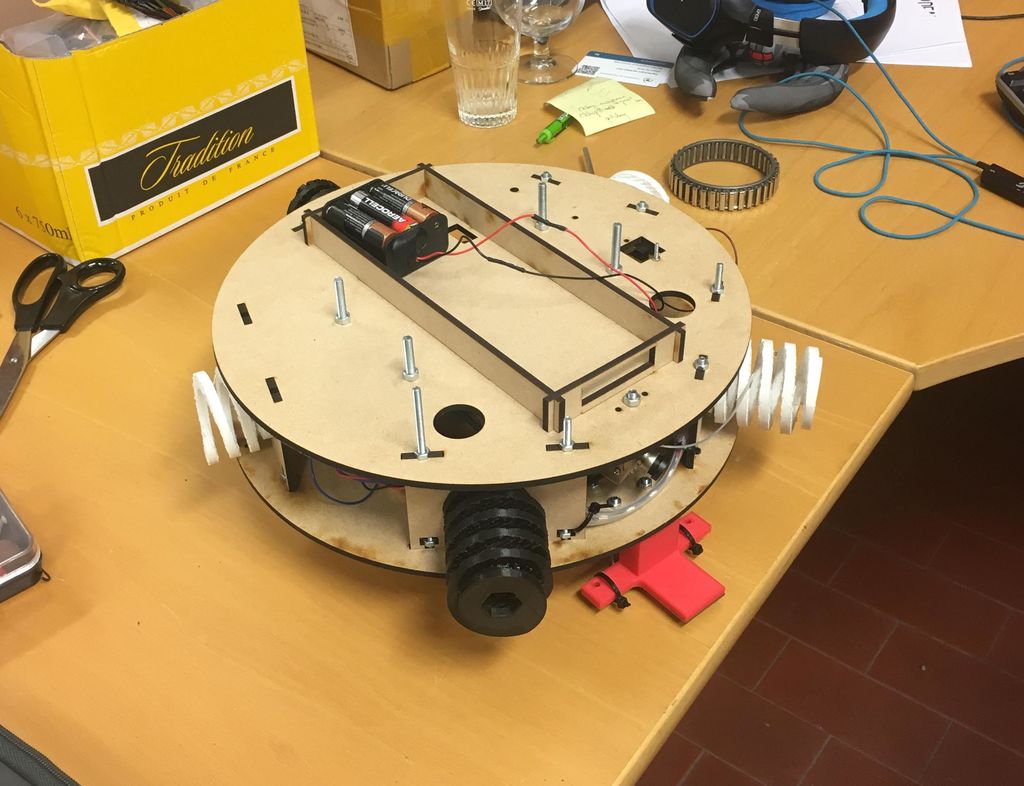
上机箱板:
下图:
摄像头
结束:
电池
开/关开关
最后,我们可以将两个底板组装在一起。
注意:将所有组件组装在一起时要小心!
在我们的例子中,一个弹簧的小板在组装两个底板时受损,因为它太薄了。我们再次以更大的宽度开始。
使用激光切割(以及3D打印机)时一定要使用坚固的材料,并确认尺寸,以免您的碎片太薄或太脆弱。
第7步:结论


一旦组装好所有组件(确保所有组件都固定好并且不会有脱落的风险),相机的接收器连接到屏幕(即电视屏幕),电池(6x 1.5V)放置在电池座上,你准备测试整个东西了!
我们试图通过便携式电池更换电池(6x 1.5V)进一步推进该项目:
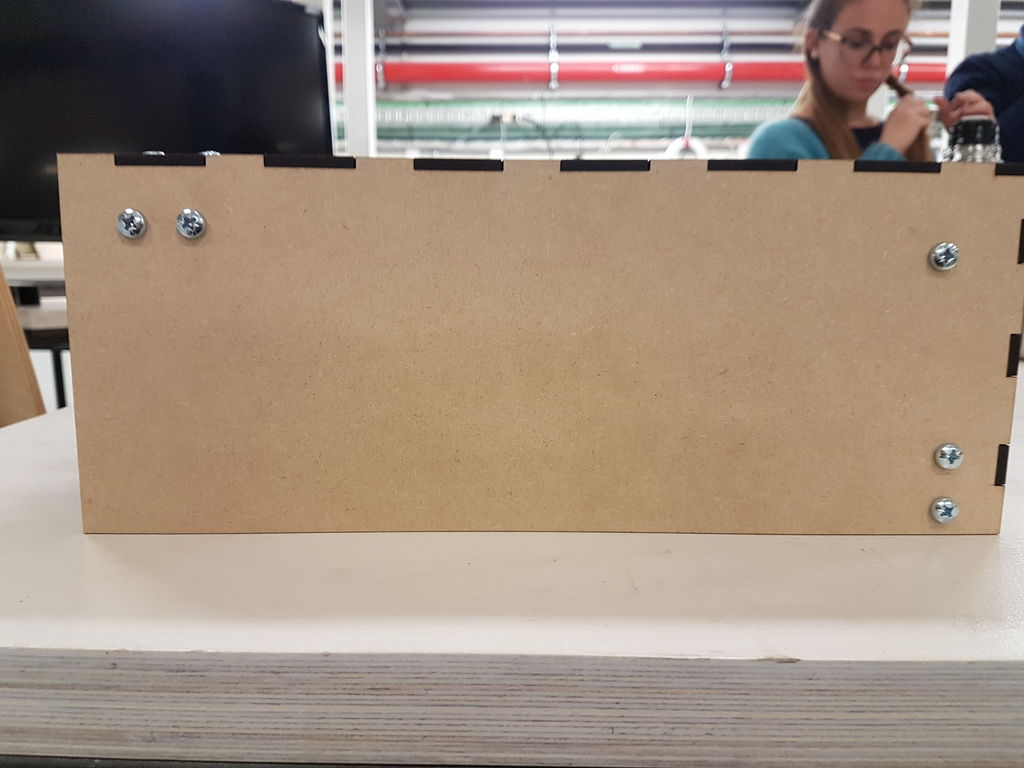
构建充电底座(固定在激光器中的无线充电器)切充电站(见照片));
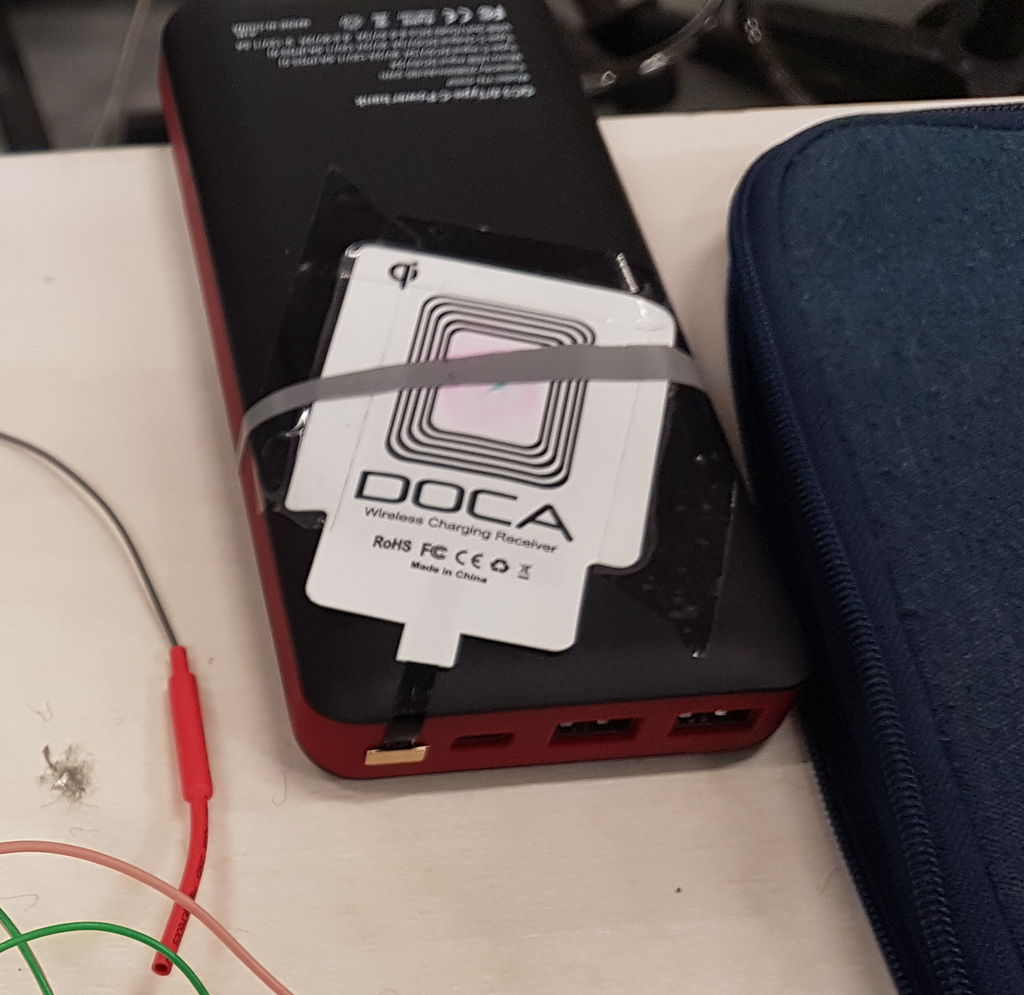
在便携式电池上添加接收器(Qi接收器)(见照片);
在Arduino上写一个功能,要求机器人沿着相反方向跟随地面上的线路到达充电座并为电池充电,以便整个机器人自动为下一个游戏会话做好准备。
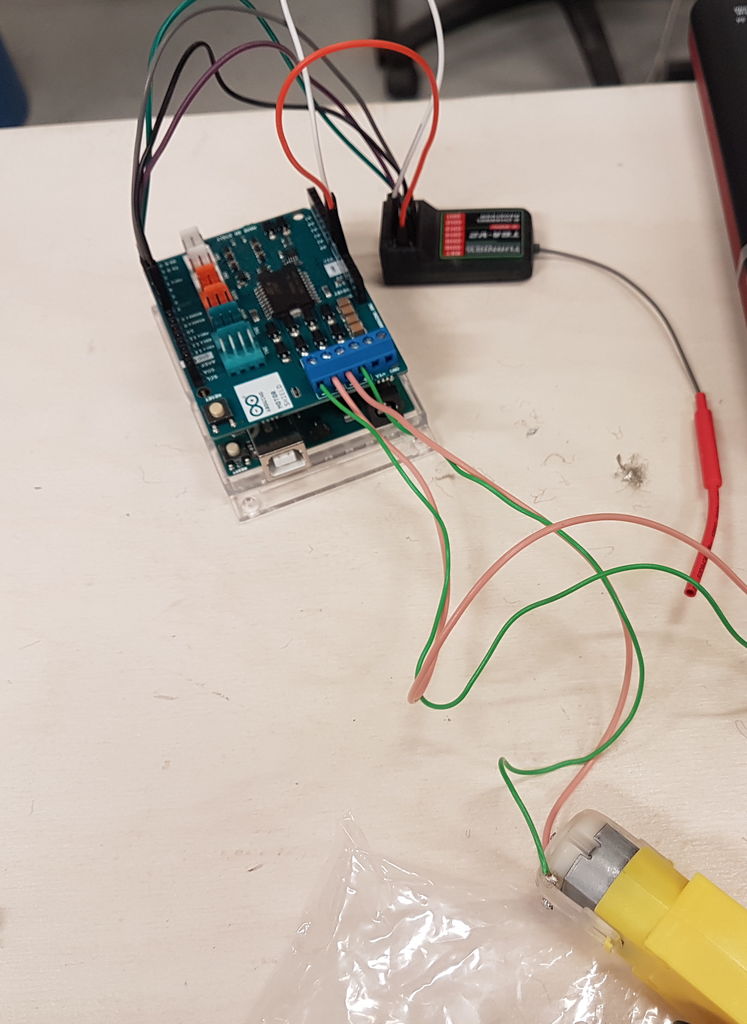
我们在项目截止日期之前遇到了用便携式电池更换电池的问题(提醒:这个项目是由我们的ULB/VUB教授监督的,因此我们有一个截止日期尊重),我们无法测试最终的机器人。您仍然可以在这里找到由计算机供电的机器人视频(USB连接)并由遥控器控制。
尽管如此,我们还是能够达到我们所定位的所有附加值:
- 坚固性 - 圆形
- 开启式谜语 - 控制开关(远程 - 》自主)
如果这个项目保留了您的注意力和您的好奇心,我们非常好奇看到你做了什么,看看你是否做了一些与我们不同的步骤,看看你是否成功完成了自动充电过程!
- 相关推荐
- 机器人
-
机器人制作资料宝典【日本顶尖机器人设计师经典教材】2012-01-10 0
-
机器人制作宝典2012-06-09 0
-
机器人竞技系列之机器人制作宝典2012-08-15 0
-
分享 《机器人制作天空宝典》,OHM 自律型机器人制作2013-05-06 0
-
瑞士水下仿生机器人-Sepios2015-01-13 0
-
什么是龙人四足机器人?2016-03-24 0
-
循线音乐百灵鸟机器人--鸥鹏机器人制作2016-03-30 0
-
自律型机器人制作入门.基于Arduino2016-06-23 0
-
四足仿生机器人2016-08-19 0
-
各种炫酷的仿生机器人2016-08-24 0
-
智能小车机器人制作大全2019-05-05 0
-
开源资料六足仿生机器人(原理图+PCB+源码等)2020-10-10 0
-
浅谈仿生机器人的概念和分类2018-12-23 12158
-
仿生机器人分为哪几类_仿生机器人研究现状2020-12-14 13179
全部0条评论

快来发表一下你的评论吧 !
