

RS232通信接口威廉希尔官方网站 的具体结构以及工作原理解析
接口/总线/驱动
描述
RS232标准是诞生于RS485之前的,但是RS232有几处不足的地方:
接口的信号电平值较高,达到十几 V,使用不当容易损坏接口芯片,电平标准也与TTL电平不兼容。
传输速率有局限,不可以过高,一般到一两百千比特每秒(Kb/s)就到极限了。
接口使用信号线和 GND 与其它设备形成共地模式的通信,这种共地模式传输容易产生干扰,并且抗干扰性能也比较弱。
传输距离有限,最多只能通信几十米。
通信的时候只能两点之间进行通信,不能够实现多机联网通信。
针对 RS232 接口的不足,就不断出现了一些新的接口标准,RS485 就是其中之一,它具备以下的特点:
采用差分信号。我们在讲 A/D 的时候,讲过差分信号输入的概念,同时也介绍了差分输入的好处,最大的优势是可以抑制共模干扰。尤其当工业现场环境比较复杂,干扰比较多时,采用差分方式可以有效的提高通信可靠性。RS485 采用两根通信线,通常用 A 和 B 或者 D+ 和 D- 来表示。逻辑“1”以两线之间的电压差为 +(0.2~6)V 表示,逻辑“0”以两线间的电压差为 -(0.2~6)V 来表示,是一种典型的差分通信。
RS485 通信速率快,最大传输速度可以达到 10 Mb/s 以上。
RS485 内部的物理结构,采用的是平衡驱动器和差分接收器的组合,抗干扰能力也大大增加。
传输距离最远可以达到1200米左右,但是它的传输速率和传输距离是成反比的,只有在 100 Kb/s 以下的传输速度,才能达到最大的通信距离,如果需要传输更远距离可以使用中继。
可以在总线上进行联网实现多机通信,总线上允许挂多个收发器,从现有的 RS485 芯片来看,有可以挂32、64、128、256等不同个设备的驱动器。
RS485 的接口非常简单,与 RS232 所使用的 MAX232 是类似的,只需要一个 RS485 转换器,就可以直接与单片机的 UART 串口连接起来,并且使用完全相同的异步串行通信协议。但是由于 RS485 是差分通信,因此接收数据和发送数据是不能同时进行的,也就是说它是一种半双工通信。那我们如何判断什么时候发送,什么时候接收呢?
RS485 转换芯片很多,这节课我们以典型的 MAX485 为例讲解 RS485 通信,如图18-1所示。
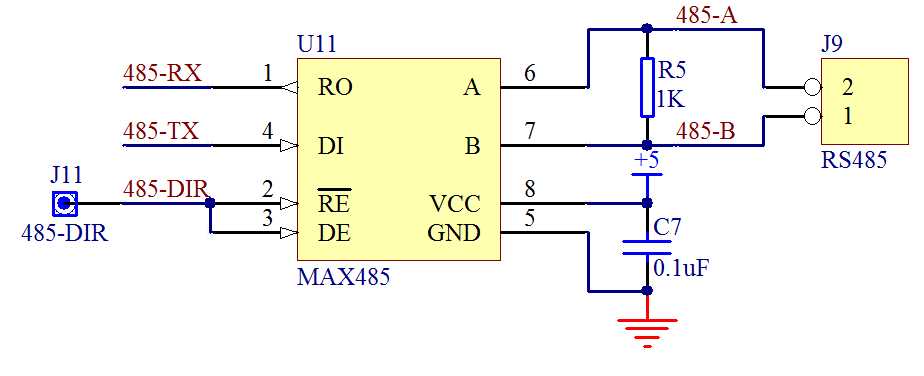
图18-1 MAX485 硬件接口
MAX485 是美信(Maxim)推出的一款常用 RS485 转换器。其中5脚和8脚是电源引脚;6脚和7脚就是 RS485 通信中的 A 和 B 两个引脚;1脚和4脚分别接到单片机的 RXD 和 TXD 引脚上,直接使用单片机 UART 进行数据接收和发送;2脚和3脚是方向引脚,其中2脚是低电平使能接收器,3脚是高电平使能输出驱动器,我们把这两个引脚连到一起,平时不发送数据的时候,保持这两个引脚是低电平,让 MAX485 处于接收状态,当需要发送数据的时候,把这个引脚拉高,发送数据,发送完毕后再拉低这个引脚就可以了。为了提高 RS485 的抗干扰能力,需要在靠近 MAX485 的 A 和 B 引脚之间并接一个电阻,这个电阻阻值从100欧到 1 K 都是可以。
在这里我们还要介绍一下如何使用 KST-51 单片机开发板进行外围扩展实验。我们的开发板只能把基本的功能给同学们做出来提供实验练习,但是同学们学习的脚步不应该停留在这个实验板上。如果想进行更多的实验,就可以通过单片机开发板的扩展接口进行扩展实验。大家可以看到蓝绿色的单片机座周围有32个插针,这32个插针就是把单片机的32个 IO 引脚全部都引出来了。在原理图上体现出来的就是 J4、J5、J6、J7 这4个器件,如图18-2所示。
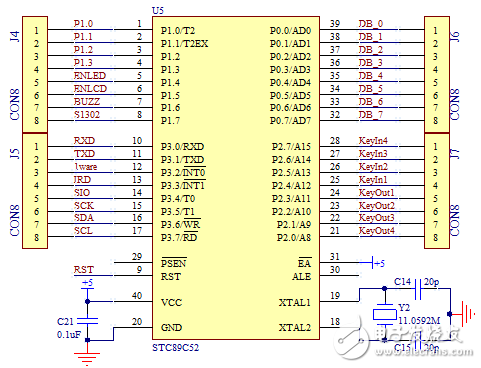
图18-2 单片机扩展接口
这32个 IO 口中并不是所有的都可以用来对外扩展,其中既作为数据输出,又可以作为数据输入的引脚是不可以用的,比如 P3.2、P3.4、P3.6 引脚,这三个引脚是不可用的。比如 P3.2 这个引脚,如果我们用来扩展,发送的信号如果和 DS18B20 的时序吻合,会导致 DS18B20 拉低引脚,影响通信。除这3个 IO 口以外的其它29个,都可以使用杜邦线接上插针,扩展出来使用。当然了,如果把当前的 IO 口应用于扩展功能了,板子上的相应功能就实现不了了,也就是说需要扩展功能和板载功能之间二选一。
在进行 RS485 实验中,我们通信用的引脚必须是 P3.0 和 P3.1,此外还有一个方向控制引脚,我们使用杜邦线将其连接到 P1.7 上去。RS485 的另外一端,大家可以使用一个 USB 转 RS485 模块,用双绞线把开发板和模块上的 A 和 B 分别对应连起来,USB 那头插入电脑,然后就可以进行通信了。
学习了第13章实用的串口通信方法和程序后,做这种串口通信的方法就很简单了,基本是一致的。我们使用实用串口通信例程的思路,做了一个简单的程序,通过串口调试助手下发任意个字符,单片机接收到后在末尾添加“回车+换行”符后再送回,在调试助手上重新显示出来,先把程序贴出来。
程序中需要注意的一点是:因为平常都是将 MAX485 设置为接收状态,只有在发送数据的时候才将 MAX485 改为发送状态,所以在 UartWrite()函数开头将 MAX485 方向引脚拉高,函数退出前再拉低。但是这里有一个细节,就是单片机的发送和接收中断产生的时刻都是在停止位的一半上,也就是说每当停止位传送了一半的时候,RI 或 TI 就已经置位并且马上进入中断(如果中断使能的话)函数了,接收的时候自然不会存在问题,但发送的时候就不一样了:当紧接着向 SBUF 写入一个字节数据时,UART 硬件会在完成上一个停止位的发送后,再开始新字节的发送,但如果此时不是继续发送下一个字节,而是已经发送完毕了,要停止发送并将 MAX485 方向引脚拉低以使 MAX485 重新处于接收状态时就有问题了,因为这时候最后的这个停止位实际只发送了一半,还没有完全完成,所以就有了 UartWrite()函数内 DelayX10us(5)这个操作,这是人为的增加了 50 us 的延时,这 50 us 的时间正好让剩下的一半停止位完成,那么这个时间自然就是由通信波特率决定的了,为波特率周期的一半。
来源;21ic
-
TTL转RS232电平转换威廉希尔官方网站 及工作原理2020-02-24 0
-
RS232接口威廉希尔官方网站2008-10-21 3236
-
RS232通信接口2009-08-09 3416
-
RS232接口保护威廉希尔官方网站2009-11-20 18230
-
CAN-RS232通信转换模块的设计与实现2010-02-25 2373
-
RS232接口隔离芯片2017-08-31 2724
-
主板串口RS232芯片烧毁问题分析(RS232作用及威廉希尔官方网站 图)2018-05-17 51717
-
简述PLC中RS232和RS485通信接口原理2018-11-13 19045
-
RS232通信威廉希尔官方网站 原理图免费下载2020-06-19 1980
-
RS232/RS485/MODBUS理解2022-01-14 2098
-
RS232通信时怎么处理错误?RS232通信中的错误处理方法2023-10-17 3036
-
RS232转以太网模块应用解析 RS232在物联网中的应用2024-11-21 263
-
RS232接口通信协议详解 如何测试RS232接口的性能2024-12-18 425
-
RS232接口的应用领域分析 RS232接口的接线方法和注意事项2024-12-18 466
全部0条评论

快来发表一下你的评论吧 !
