
资料下载


使用无线传感器网络实现移动机器人的节点定位资料说明
ah此生不换
分享资料个
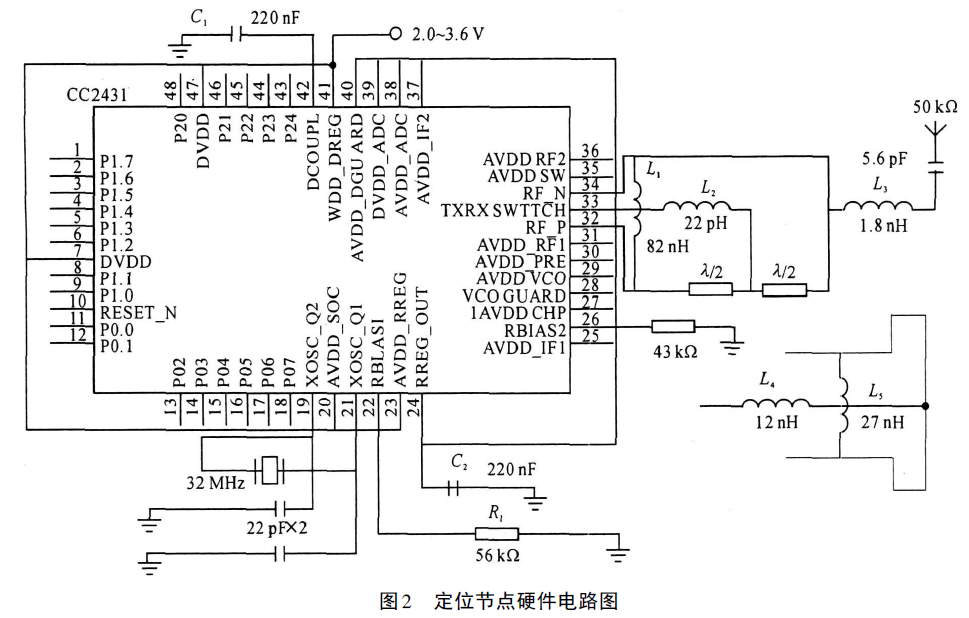
介绍了一种基于无线传感器网络的移动机器人节点定位实现方案, 阐述了节点定位的基本原理, 给出了节点硬件威廉希尔官方网站 设计和相关的软件工作流程, 并通过应用试验, 验证该方案具有较好的定位效果。
无线传感器网络(Wir eless Sensor Netw or k, WSN) 的相关研究最早起源于军事领域。随着微型传感器技术的发展和节点间无线通信能力的提高, 无线传感器网络在环境、医疗、智能家居、工业自动化甚至是空间探索、反恐和救灾等领域的应用有着得天独厚的优势。
移动机器人虽然有着强大的计算能力和移动性, 但其感知能力的局限性限制了其智能的发展。无线传感器网络具备自组织、微型化和对周围区域的感知能力等特点, 移动机器人可以通过一定的装置和传感器网络进行信息的交互, 在传感器网络的引导下完成导航和任务执行。本文提出一种基于无线传感器网络实现机器人节点定位的方法, 实现无线传感器网络和移动机器人的结合, 具有一定的实用价值。
目前的定位算法按定位手段分为两大类: 基于测距算法和非测距算法, 本文采用的是基于接收信号强度指示( RSSI) 的测距定位算法。如图1 所示定位系统由参考节点和定位节点组成, 参考节点是一个位于已知位置的静态节点, 这个节点可以将其位置信息通过发送数据包通知其他节点; 定位节点( 安装在机器人上) 从参考节点处接收数据包信号, 经过定位算法来计算其坐标位置, 测得的位置信息不停地刷新, 可视化地显示在PC 机的监控软件上。定位节点所有的计算过程是由芯片CC2431 的定位引擎实现的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





