
资料下载


下肢外骨骼机器人的控制策略研究进展详细说明
sole丶
分享资料个
外骨骼机器人的研究可以追溯到 20 世纪 60 年代,最初的研究目的主要是用于提高士兵的背负承载能力,随着机器人技术和生物检测技术的不断发展,外骨骼机器人的研究取得了飞跃性突破。基于不同作用对象,大致可以将其分为三类:增强健康人群自身机能的人类增强型外骨骼,如BLEEX(Berkeley lower extremity exoskeleton);下肢运动能力受损患者康复治疗的步态康复型外骨骼,如 ReWalk;辅助残疾人或老年人站立或行走的辅助型外骨骼,如 HAL(hybrid assistive leg)。
基于不同目的和作用对象,外骨骼机器人通过采用不同控制策略,并利用信息采集模块实时监测穿戴者运动信息及人机交互信息,以保证运动的正确性和穿戴者的适宜性。同时,通过对外骨骼进行精确控制可以有效避免对患者造成二次伤害,因此开展外骨骼机器人控制策略的研究具有重要的实际应用价值。
1 下肢外骨骼机器人控制策略
根据控制参数的不同,外骨骼控制类型可分为基于位置的控制、基于力信息的人机交互控制、基于生物电信号的人机交互控制和智能控制。其中,基于位置的控制策略可分为轨迹跟踪控制、骨盆控制;基于力信息的人机交互控制策略可分为阻抗控制、力/ 位混合控制、灵敏度放大控制、零力矩点控制、地面反作用力控制 ;基于生物电信号的人机交互控制策略可分为肌电控制、脑电控制;智能控制策略分为模糊控制、神经网络控制。其特点和应用如表1所示。
1.1 基于位置的控制
基于位置的控制类型根据正常人体关节位移轨迹,规划外骨骼运动轨迹,其控制策略又可分为轨迹跟踪控制和骨盆控制。
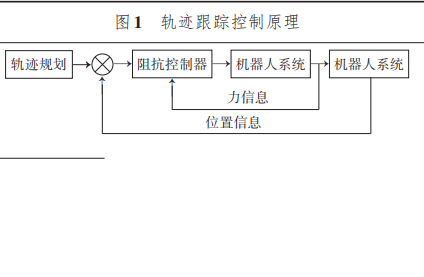
1.1.1 轨迹跟踪控制策略是指外骨骼带动患肢沿预先规划的轨迹进行步态训练,其原理如图1所示。瑞士Lokomat 康复机器人采用轨迹跟踪控制,预先设定期望运动轨迹,通过控制机器人的关节角度和角速度,实现患者的康复训练。意大利的卧式步态康复机器人[7] 通过规划特定轨迹的腿部运动,带动患者患肢在矢状面沿期望轨迹运动,以模拟人体步态运动。韩国庆熙大学研制的步态康复训练机在采用轨迹跟踪控制的基础上,在脚踏板上安装压力传感器实时监测患者在训练时的足底压力,评定康复效果 。日本筑波大学研制的步态康复机器人根据预先制定好的步态轨迹,带动患者患肢做上楼梯运动。哈尔滨工程大学研制的减重式步态训练机器人和站立式下肢康复训练机也是采用轨迹跟踪控制帮助患者模拟正常人行走训练。太原理工大学张政等 结合传统 PID 控制算法,设计了 bangbang-PD 轨迹跟踪控制算法。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章







