

未来蓝牙新方向之一:AoA室内定位
电子说
描述

室内定位一直被炒的非常火的黑科技,也是近年资本追逐的热点,市场上一直有众多宣称可以做到厘米级,米级精度定位的公司,但问题很多,无法大规模商用。近些年有很多人尝试使用蓝牙beacon方式做定位,小众应该可以满足需要,但是依然问题很多;直到今天,出现了新的技术:蓝牙AoA定位。
先介绍一下现有室内定位方案:
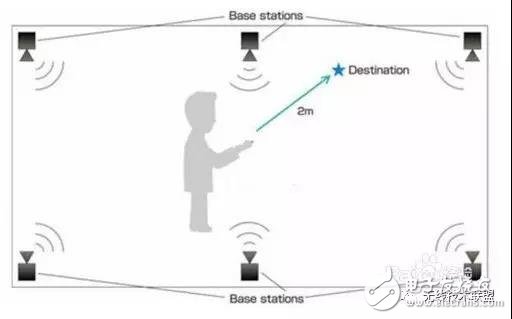
1. 超声波室内定位技术
超声波定位主要采用反射式测距法,通过多边定位等方法确定物体位置,系统由一个主测距器和若干接收器组成,主测距仪可放置在待测目标上,接收器固定于室内环境中。定位时,向接收器发射同频率的信号,接收器接收后又反射传输给主测距器,根据回波和发射波的时间差计算出距离,从而确定位置。
超声波定位整体定位精度较高,结构简单,但超声波受多径效应和非视距传播影响很大,且超声波频率受多普勒效应和温度影响,同时也需要大量基础硬件设施,成本较高。
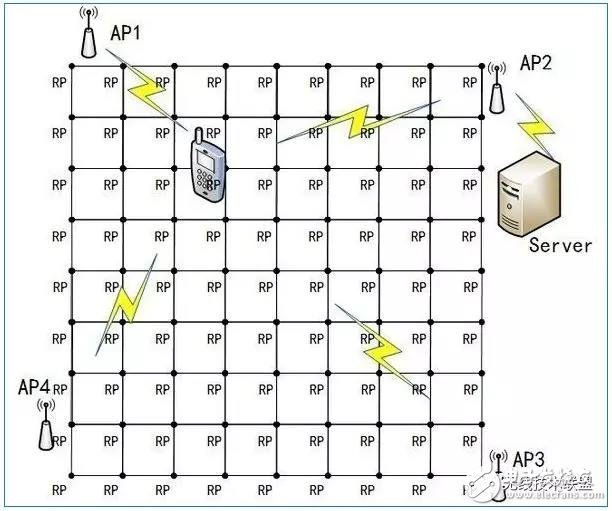
2. WiFi室内定位技术 位置指纹法
室内定位中的位置指纹法,简单来说,就是事先把各个位置上的信号特征(各Wi-Fi的信号强度)测量一遍,存入指纹数据库。定位的时候,将当前的信号特征与指纹库中的进行匹配,从而确定位置。示意图(AP就是WiFi,RP是离线采集选取的参考点)
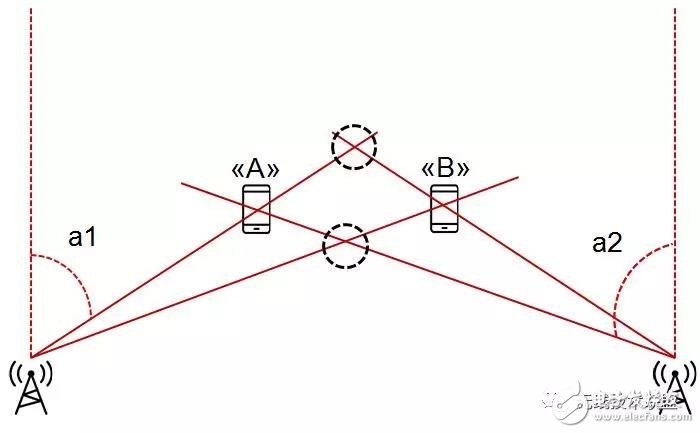
3. UWB(超宽带)定位 AOA定位算法
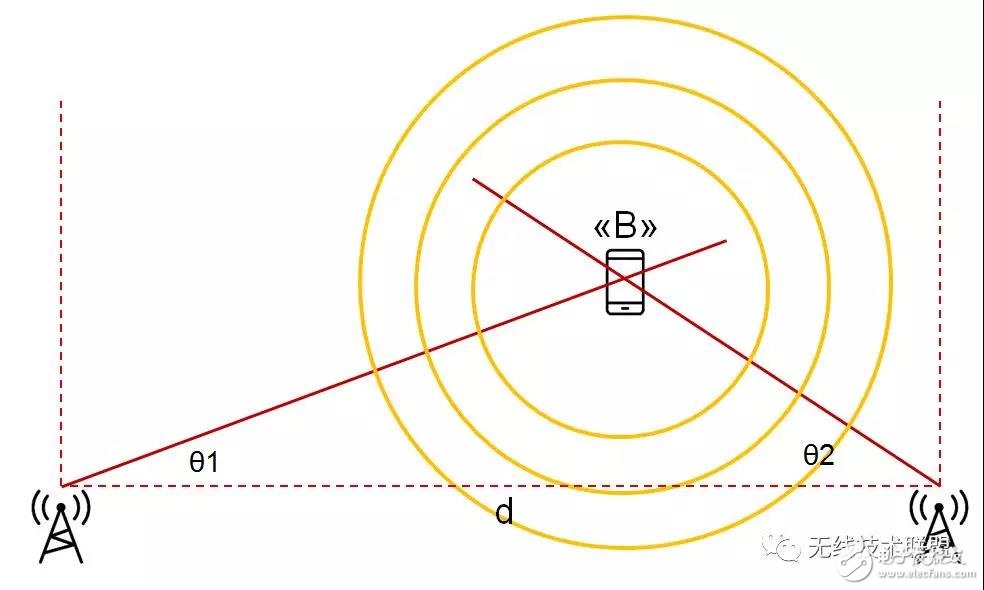
AOA(Angle of Arrival,到达角度)定位是一种两基站定位方法,基于信号的入射角度进行定位。
如图所示,知道了基站1到设备之间连线与基准方向的夹角α1,就可以画出一条射线L1;同样知道了知道了基站2到设备之间连线与基准方向的夹角α2,就可以画出一条射线L2。那么L1月L2的交点就是设备的位置。这就是AOA定位的基本数学原理。用函数调用表达如下:
Location=GetLocation([Pisition1,α1],[Position2,α2]);
AOA定位通过两直线相交确定位置,不可能有多个交点,避免了定位的模糊性。但是为了测量电磁波的入射角度,接收机必须配备方向性强的天线阵列。
超宽带定位技术具有穿透力强、抗多径效果好、安全性高、系统复杂度低、能提供精确定位精度等优点,但其射频频段工作在6-7G hz,设计难度大,软件复杂,商用场合受限。
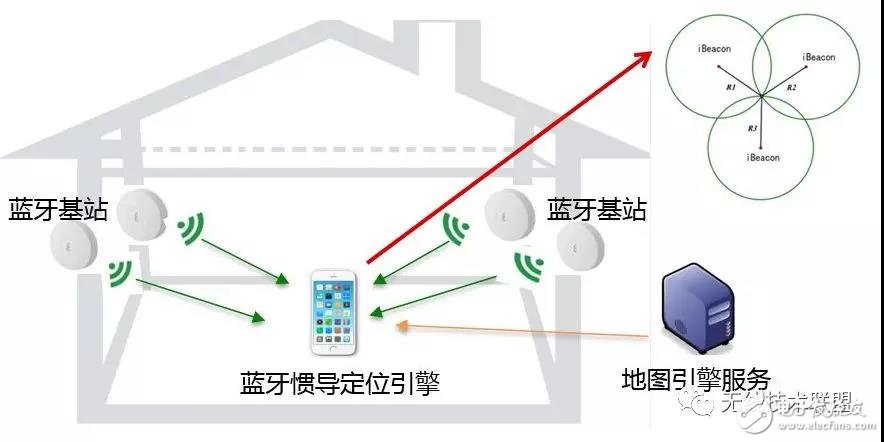
4. 蓝牙beacon室内定位技术 三边测量法
市面上蓝牙定位的方式都是采用三边测量原理,设备端采用ibeacon,或者私有beacon广播方式发送Beacon信号,接收机,通常是手机,根据接收到广播设备的信号强度和设备ID号,根据事先绘制的坐标地图,反向判定自己所处的位置点。该方案的优势有几点:
1.RSSI直接是蓝牙协议栈的一部分,方便获取。
2.手机支持蓝牙
3.发射端硬件设计简单,功耗低
几种定位方式的总结
超声波定位基本不适用,需要大量布点,对周围环境有特殊要求;Uwb频段高,设计难度大只使用于尖端地方,收发都需要专用AoA射频设备;蓝牙定位目前在人员管控,危险区域布防商城室内导航有部分应用,但精度不好,网络阻塞严重,效果一般,但可以和手机互联互通,所以得到许多公司折中认可。
AoA 角度位置算法
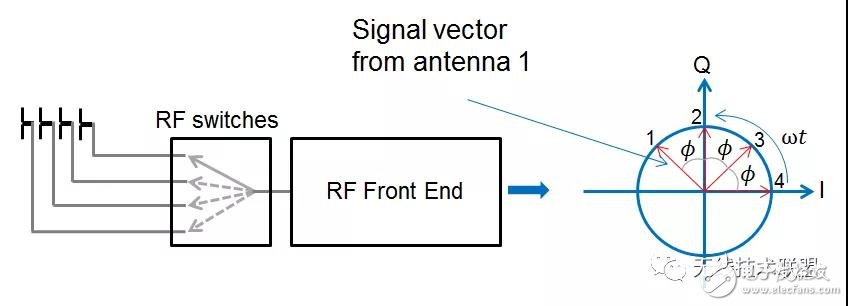
本质只需要蓝牙芯片只要开放蓝牙射频端的载波振幅和相位值收发(I/Q值),工程师自行设计天线整列即可通过使用I/Q值计算出AoA角度方位,通过两个接收机,就可以判断发射机的精确位置。
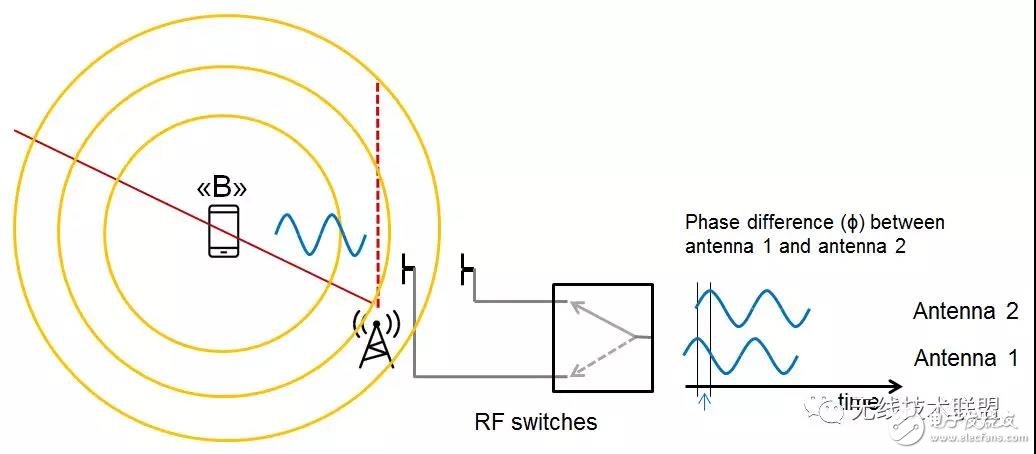
如WUB图示,一个发射机配合两个接收机,通过两个接收机的信号到达角即可在二维平面中画出发射机的相对kyj位置,首先单看一个接收机Br,发射机B持续发送广播信号,接收机Br的天线整列接收到的波形肯定是不同步的,其相位差
ϕ是我们可以通过数学运算得到的参数,图示为2整列天线,同时可以设计多整列天线,ϕ可以为天线的相位差求均值。
下图为4天线设计,两两天线间距d为定值,计算出ϕ取均值,计算出ϕ后,可由ϕ以及天线间距d计算得到发射和接收机之间的相对角度差θ。
通过两个接收机,得到两个θ,通过θ和d即可计算出发射机位置。
德州仪器CC2640R2F 蓝牙AoA方案
有传闻下一版蓝牙协议会支持AoA功能,之前特咨询过几家大蓝牙原厂,都表明赞不支持,直到最近听说TI已经推出AoA算法包,立刻下载了最新的CC2640R2F蓝牙协议栈(simplelink_cc2640r2_sdk_2_20),果不其然,还有ToF,TI果然在憋大招。
根据sdk的说明文档,可以看到德州仪器软件包可以直接提供API接口,接收机可以直接计算出θ角:
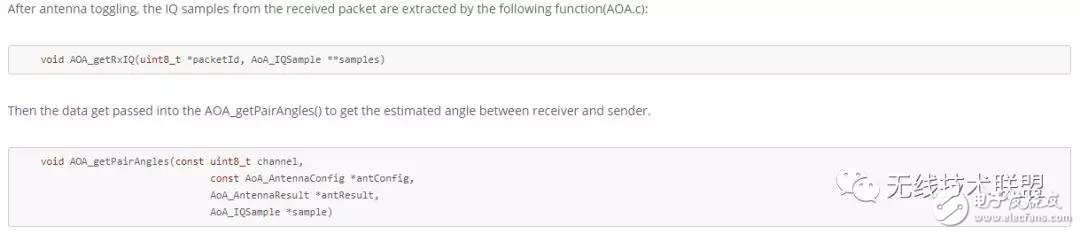
而且还提供了完整的天线阵列的评估套件,配合CC2640R2官方开发板,即可调试室内定位方案。
总结
可以预见,在蓝牙模块价格战的当下,和Mesh组网一样,蓝牙AoA技术发展务必带来新的商机,但是其门槛一定比蓝牙高不少,阵列天线,AoA角度精确度,不同场景下的定位设备布置,云端数据管理,每一件都不是简单,但是这么好的市场,攻城狮们,你们准备好了吗?
-
蓝牙AOA是如何实现人员定位的呢2024-08-06 0
-
详解基于Beacon的蓝牙室内定位方案2017-06-03 0
-
蓝牙网关是如何实现室内定位2017-12-08 0
-
常见的室内定位方案2018-11-29 0
-
几种主流室内定位技术比较,谁更厉害?2020-07-27 0
-
车用电子是不是无线蓝牙应用的新方向?2021-05-14 0
-
蓝牙Beacon室内定位的原理是什么?其有哪些应用?2021-05-18 0
-
关于蓝牙室内定位蓝牙网关网络侧室内定位pdf资料下载2017-12-22 935
-
全新蓝牙AOA室内定位技术的详情2021-11-05 1559
-
厘米级蓝牙AOA室内定位解决方案2021-10-26 1607
-
蓝牙室内定位融合技术方案2021-11-26 1222
-
蓝牙AOA与室内高精度定位的发展2022-07-29 2174
-
室内定位发展面临哪些局限?2021-10-19 1367
-
精确到1m!看AOA如何瞄准千亿室内定位市场2022-10-09 725
-
室内定位蓝牙AoA/RSSI技术选择参考2024-03-21 832
全部0条评论

快来发表一下你的评论吧 !
