

Arduino头骨的制作
电子说
1.3w人已加入
描述
步骤1:钻一个足够大的洞您想将钳和曲别针安装到颚的任何一侧上的曲别针。
步骤2:将曲别针定型以折叠到伺服/曲别针上并制成
我无法提供伺服器的图片,因为它是
第3步:接线
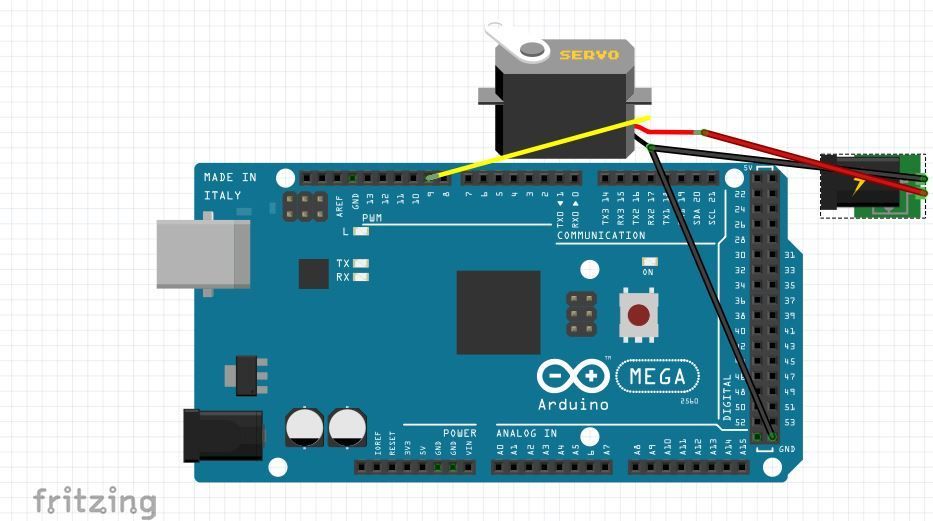
将伺服器的信号引脚连接到PWM引脚(对于Mega 2560,它是9针)。将伺服器的正极连接到 INDEPENDENT 电源。将Arduino的 BOTH GND 和电源的GND连接到伺服器的GND。
步骤4:代码(我不相信代码FIY)
//www.elegoo.com
//2016.12.08
#include“ Servo.h”
Servo myservo;//创建伺服对象来控制伺服////在大多数板上可以创建十二个伺服对象
int pos = 0;//用于存储伺服位置的变量
void setup()
{
myservo.attach(9);//将伺服器在针脚9上连接至伺服对象
}
void loop()
{
for(pos = 0; pos 《= 180; pos + = 1)//从0度到180度//以1度为步长
{
myservo.write(pos);//告诉伺服器在变量‘pos’中定位
delay(15);//等待15毫秒以使伺服器到达位置
}
for(pos = 180; pos》 = 0; pos-= 1)//从180度变为0度
{
myservo.write(pos);//告诉伺服器在变量‘pos’中定位
delay(15);//等待15毫秒以使伺服器到达位置
}
}
责任编辑:wv
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- Arduino
-
基于Arduino的触摸变色台灯制作2017-01-22 1221
-
几个Arduino创意制作分享2017-10-16 2648
-
基于Arduino的趣味电子制作2018-06-26 2058
-
使用TCS3200和Arduino Uno制作Arduino Chameleon2022-10-27 686
-
如何用Arduino制作音乐2022-10-26 623
-
制作Arduino蓝牙连接2022-10-31 968
-
Arduino如何制作智能按钮2022-11-09 748
-
用arduino制作电报2022-12-27 291
-
使用Arduino制作基于音乐的项目2023-01-05 374
-
用Arduino制作游戏2023-01-31 454
-
使用Arduino Nano点亮骰子头骨2023-02-09 471
-
如何制作基于Arduino的自动开门2023-06-29 775
-
用Arduino制作音效2023-07-06 313
-
利用Arduino制作逆变器原理2023-07-07 312
-
Arduino制作循迹小车教程2024-01-05 411
全部0条评论

快来发表一下你的评论吧 !
