
资料下载


设计一个简易智能电动小车的论文免费下载
分享资料个
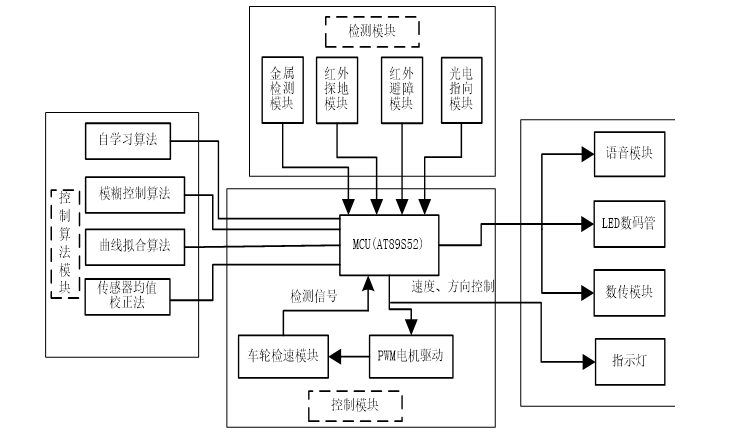
简易智能电动车实现了路面标识跟踪、金属探测、曲线行驶、躲避障碍物、寻找光源以及安全进入车库等功能,并且能够在行驶过程中用语音、指示灯等方式提示电动车的行驶状态。
采用左右独立的传动模式行驶,通过光电、红外和接近开关等传感器,由单片机系统来决策智能车的行驶状态。采用PWM技术实现了电动机的多级调速;采用硬件自学习威廉希尔官方网站 提高对不同黑白程度路面的适应能力。独特的雷达扫描式光电探测装置保证了光源探测的灵活性,提高了控制决策的有效性。
不同路段的软件模块对各个传感器赋以不同的权值,提高了各个路段行驶策略的针对性。通过均值采样算法降低了噪声信号的干扰,通过模糊控制算法实现了智能避障和光源跟踪。采用原子模块循环法实现数据采集、分析、处理和控制输出。
一、方案选择与论证
1、运动方式的选择
通常的运动方法有轮式和履带驱动式两种,其选择依赖于路面状况、机械复杂性和控制复杂性。
方案一:采用四轮——常见的汽车结构模式
特点是一个马达作为动力,通过变速箱驱动后轮;另一个马达转动导向轮来决定行驶方向。优点是在直道行驶速度较快、方向和速度相互独立。缺点为转弯半径大、驱动轮易打滑、导向轮方向不易精确控制。
方案二:采用履带式结构
特点:两个电机分别驱动两条履带。优点是可以在原地转动;在不平的路面上性能稳定,牵引力大。缺点为速度慢、速度和方向不能单独控制摩擦力很大;能量损耗大,机械结构复杂。
综合考虑,我们将轮式和履带式的优点结合在一起,采用两个大脚车的模型(见附图三)拼接而成,达到了较好的机动性和可控性。
2、电机驱动调速方案论证
电机驱动调速方案的控制目标是实现电动机的正、反转及调速
方案一:电阻网络或数字电位器调整分压
采用电阻网络或数字电位器分压调整电动机的电压。但电动机工作电流很大;分压不仅会降低效率,而且实现很困难。
方案二:采用继电器开关控制
采用继电器控制电动机的开或关,通过开关的切换调整车速。优点是威廉希尔官方网站 简单,缺点是响应时间慢、控制精度低、机械结构易损坏、寿命较短、可靠性低。
方案三:H型PWM威廉希尔官方网站
采用电子开关组成H型PWM威廉希尔官方网站 。H型威廉希尔官方网站 保证了简单的实现转速和方向的控制;用单片机控制电子开关工作的占空比,精确调整电动机转速。最终选择方案三。
3、路面探测方案论证
探测路面黑线的原理:光线照射到路面并反射,由于黑线和白线的反射系数不同,可根据接收到的反射光的强弱来判断传感器和黑线相对位置。
方案一:采用可见光发光二极管和光敏二极管
采用普通可见光发光管和光敏管组成的发射-接收威廉希尔官方网站 。其缺点在于易受到环境光源的影响。即便提高发光管亮度也难以抵抗外界光的干扰。
方案二:采用反射式红外发射-接收器
采用反射式红外发射-接收器。直接用直流电压对发射管进行供电,其优点是实现简单,对环境光源的抗干扰能力强,在要求不高时可以使用。
方案三:采用脉冲调制的红外发射-接收器
在方案二的基础上采用脉冲调制发射。由于环境光干扰主要是直流分量,因此如果采用带有特定交流分量的调制信号,则可在接收端采用相应的手段来大幅度减少外界干扰。缺点是实现复杂﹑成本高。
根据本题目中对探测地面的要求,由于传感器可以在车体的下部,发射、接收距地面都很近,外界光对其的干扰都很小。在基本不影响效果的前提下,为了简便起见,我们选用了方案二。
4、障碍物探测模块
方案一:超声波探测
采用超声波器件。超声波波瓣较宽,一个发生器就可以监视较宽的范围。其优点为抗干扰能力强,不受物体表面颜色的影响。缺点为实现威廉希尔官方网站 复杂,且用通常的测量方法在较近距离上有盲区。
方案二:光电式探测
采用光电式发射、检测模块。由于单个发射器的照射范围不能太小,因此不使用激光管。用波瓣较宽的脉冲调制型红外发射管和接收器。其优点是威廉希尔官方网站 实现简单,抗干扰性较强。
由于题目中已知障碍物外表为白色,有利于红外线的反射。同时从威廉希尔官方网站 实现的难易程度上考虑,我们最终选择了方案二。
5、寻光定向模块
题目条件是在终点线后放置200W白炽灯用以指向,因此采用普通光敏三极管进行检测。
方案一:车转式安装
采用固定方向安装方式。将两个光敏三极管固定在车头的左右两边指向前方,当车头对准光源时,两传感器输出平衡;当车的方向不准时,通过两传感器输出的差别控制车原地转向来寻找光源。
方案二:模拟雷达扫描
用装在车底盘上的步进电机带动圆盘左右扫描,装在圆盘上的光敏传感器通过扫描,可以准确定位光源。
方案一实现简单,其缺点为寻找光源较麻烦,需要驱动整辆智能车转动,功耗多且浪费时间;方案二实现较为复杂,但是其定位准确,仅转动圆盘而不用转动智能车,节省了电源和时间。考虑到题目的指标要求及系统性能要求,我们采用了方案二。
6、车轮检速及路程计算模块
方案一:磁感应式
采用霍尔元器件(霍尔元器件应用霍尔效应,输出量与磁场的大小有关)并在车轮上安装磁片,利用位置固定的开关型霍尔元器件来检测车轮的转动,通过单位时间内的脉冲数进行车速测量。
方案二:光反射式
采用反射式红外器件。在车轮轮辐面板上均匀画出黑底白线或白底黑线,通过正对线条的反射式红外器件,产生脉冲。通过对脉冲的计数测速。
方案三:光对射式
采用对射式红外传感器。在轮辐面板上均匀刻出孔,在轮子两侧固定相对的红外发射、接收器件。在过孔处接收器可以接收到信号。从而轮子转动时可以产生连续脉冲信号,通过对脉冲的计数进行车速测量。
以结构简单和输出精确作为选择标准,我们认为使用方案一的工作量最小。方案二、三虽然可以达到较高的精度(磁片不可能放置太密),但安装较麻烦。由于题目中对路程的记录没有较高的精度要求,因此选择了方案一。
7、供电电源选择
方案一:单电源供电
优点是供电威廉希尔官方网站 简单;缺点是由于电机的特性,电压波动较大,严重时可能造成单片机系统掉电。
方案二:双电源供电
将电机驱动电源其它威廉希尔官方网站 电源分离,利用光电耦合器传输信号。优点是减少耦合,提高系统稳定性;缺点为威廉希尔官方网站 较复杂,电池占空间较大。
由于车耗电量较大,用3节锂电池(每节3V)或6节5号碱性电池串联供电,可以满足电量要求,为了节省有限的空间,选用单电源供电。又考虑到锂电成本较高,且车体需要电池来配平重心,最终选用6节碱性电池装到车体后部。电流分为两路,一路通过7805稳压后向控制系统和传感器供电,另一路加到电机驱动威廉希尔官方网站 ,并在电机端口两端加上了0.1uf去耦电容。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



