

基于RFID技术车载终端系统是个什么样子
RF/无线
描述
在信息化高速发展的今天,数字化信息的应用越来越成熟,各行业通过其优化产业结构、抢占市场。目前得到广泛应用的车载终端,大多仅利用了摄像头的录像功能,不能及时将监控信息及时传回监控中心,并非真正的实时远程监控终端,不能满足自动化作业需求。随着当前物流行业的迅速发展,将物联网技术引入物流行业管理,将对提升物流企业的效益起到事半功倍的作用。文中介绍的基于RFID的物联网车载系统是运行于车载终端中的智能系统,安装在运输车辆后,通过RFID技术以及其他动态信息采集技术,无需人工操作,自动与控制中心进行通信,实现对车辆的全程掌控。
1 系统总体分析
物联网车载系统采用ARM11嵌入式处理器在Linux平台上进行开发,采用了GPS定位、GPRS通信技术、RFID无线射频技术等。车载终端的底层基于嵌入式平台,将嵌入式软件植入物流车载终端,通过写入的控制程序完成对其他功能模块的控制,从而实现以下功能:
1)实时完成信息传输;
2)远程终端内植入读卡器,对装车的货物进行识别和记录;
3)实现自身全程精确定位;
4)利用摄像装置,获取所需的图像信息;
5)与控制中心的通信;
2 系统硬件设计
物联网物流车载终端系统主要由ARM11核心系统、GPS模块、GPRS模块、RFID识别模块、图像采集模块等组成。系统结构框图如图1所示。

本系统要求实时传输、GPS位置、RFID识别信息等,对车辆实时动态跟踪,综合各方面的需求,嵌入式系统的CPU选用Samsung公司的S3C 6410微处理器,其稳定主频667 MHz,最高主频可达800 MHz,集成了许多外设接口,具有高性能、低功耗的特点,有较大的存储空间和较强的计算能力,满足本系统对于数据处理存储的需要,实现各部分功能。
GPS定位模块选用的GS-91 GES卫星定位模块,是一个高性能、低功耗的GPS卫星接收引擎板,是一个完整的卫星定位接收器具备全方位功能,定位精度可以达到10 m。
无线通信模块选用SIMCOM公司的SIM300模块。它是一款三频段GSM/GPRS模块,可在全球范围内的EGSM900 MHz、DCS 1 800 MHz、PCS 1 900 MHz 3种频率下工作,能够提供GPRS多信道类型多达10个,并且支持CS-1、CS-2、CS-3和CS-4 4种GPRS编码方案,内嵌了TCP/IP协议,只需通过AT指令就能很快接入Internet。
Nand flash为存储外设。本系统将视频信息存放在nandflash中,同时LINUX的Uboot、内核、开机图片和文件系统也都烧写到nand flash中。
远程终端采用摄像头模块完成图像采集功能。摄像头模块采用中星微Z301P USB摄像头,模块通过USB接口与嵌入式平台直接连接,嵌入式系统对图像进行存储,保障了数据的安全性。采集到的图像信息,经过嵌入式系统进一步压缩处理,通过无线通信模块发送到远程控制中心。
射频识别模块选用nRF24L01无线射频模块,nRF24L01是一款工作在2.4~2.5 GHz世界通用ISM频段的单片无线收发器芯片,它有极低的电流消耗。系统将标签放置在运输货物上,通过终端上的RFID读卡器,对进入运输车辆的货物进行识别管理。
3 系统软件设计
物联网物流车载终端的软件系统选用嵌入式Linux操作系统作为开发平台。首先在PC机上搭建Linux操作系统,然后在建立交叉编译环境。在这个过程中,GPS定位信息、GPRS无线传输、图像采集、RFID识别信息的采集等都是采用C语言在PC机上编写,然后采用交叉编译产生可执行文件下到S3C6410上运行。
3.1 GPS模块
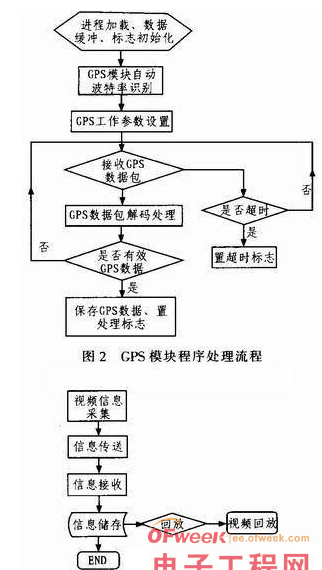
GPS模块程序是本系统的关键和基础,主要完成经纬度、车速、加速度、海拔、方位角等信息的自动采集工作。打开设备以后,首先需要串口初始化,设置波特率、数据位、停止位、校验位等参数,然后打开串口读取原始GPS信息,最后调用函数gps_phame(char*line,GPS_ INF0*GPS);对GPS信息进行解析。该模块程序处理流程如图2所示。
3.2 GPRS模块
GPRS模块程序是实现远程无线联网、实时数据通信的关键和基础,主要完成交互数据通信、短信接收发送、在线数据更新、调度中心远程指令控制等功能。为了兼顾数据通信和短信收发功能,GPRS模块没有使用TCP/IP透明传输模式,而是工作在AT指令模式,数据通信采用TCP/IP协议,通信格式为自定义PDU双字节编码模式,短信采用国际通用标准PDU数据格式。
3.3 行程回放
本系统可以实时对车辆进行定位,同时将行车路线存储在nand flash中,而视频信息在车载终端进行采集,视频信息同样可以存储在nand flash中,行车路线信息可以选择回放,如图3所示。
3.4 图像采集模块
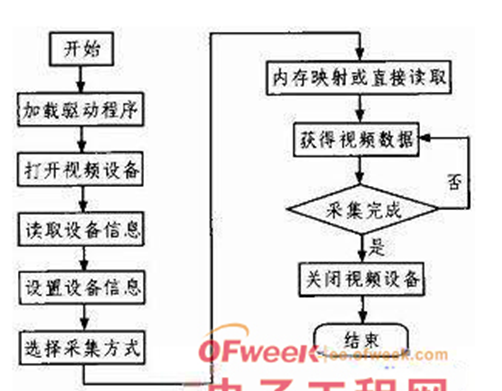
本系统采用Linux2.6.36内核,它采用了UVC的驱动v412(video4linux2的简称)框架。v412为Linux视频设备程序提供了一套接口规范,包括一套数据结构和底层v412驱动接口。图像采集的处理流程如图4所示。
3.5 识别信息采集
nRF24L01通过UART串口与Linux系统通信,它在接收模式下可以接收6路不同通道的数据,设置为接收模式的nRF24L01可以对这6个发射端进行识别,nRF24L01确认收到数据后记录地址,以此地址为目标地址发送应答信号,在发送端数据通道0被用做接收应答信号。
nRF24L01初始化部分代码如下:
4 结果及分析
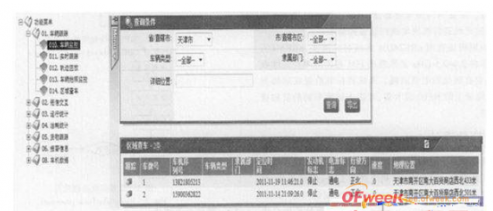
本系统上位机监视控制操作界面是用Java语言开发的,管理平台结合GIS信息,实时的显示当前
5 结束语
文中提出了一种基于RFID技术的物联网车载终端系统,选择嵌入式Linux操作系统和S3C6410处理器作为软件和硬件平台,成功的开发出样机。通过对物流企业的车辆进行实时远程监控,提高物流效率,节约物流成本;通过车辆定位、车况信息监控等功能实现对车辆行车全程监控,提高行车安全。基于RFID的物联网物流车载终端的使用,将先进的物流管理理念引入生产经营过程,同时由于系统采用的是无线网络,只要GPRS网络覆盖的范围内即可实现与控制中心的实时通信,很好的实现实时精确定位监控,有非常实用的价值。
责任编辑:ct
-
基于RFID技术的物联网车载终端如何设计2019-11-15 807
-
车载GPS智能终端的设计与实现2011-07-11 0
-
全新升级RFID手持技术-MRS2013-05-15 0
-
国内车载智能终端之最2014-08-29 0
-
基于语音合成技术的车载终端系统该怎样去设计?2021-05-12 0
-
vga接口是什么样子2007-11-27 9204
-
1394接口是什么样子2007-11-27 9083
-
最早的电池是什么样子的?2010-03-10 17877
-
基于RFID的物联网车载终端系统2012-11-09 1028
-
基于北斗导航与RFID技术的智能车载终端设计2017-11-02 1079
-
基于RFID技术的物联网车载终端系统设计详解2018-07-30 1894
-
基于RFID的物联网车载系统2018-09-12 511
-
RFID技术分类工作原理是什么样子的2019-11-15 628
-
下一代硅光子技术会是什么样子?2023-07-05 655
-
RFID手持终端的无线技术支持2024-10-29 246
全部0条评论

快来发表一下你的评论吧 !
