

RS-232接口实现串口数据传输的点对点通信设计
接口/总线/驱动
描述
单片机在控制本地的外围期间时,信息的交互是通过8位并行数据总线进行的,但是在较大规模的现代控制系统中,单片机还需要控制远端的设备,可以利用单片机的串行通信模块,在学习了RS-232串口通信的原理和时序后,学习了利用RS-232接口实现串口数据传输的点对点通信。
主要器件:
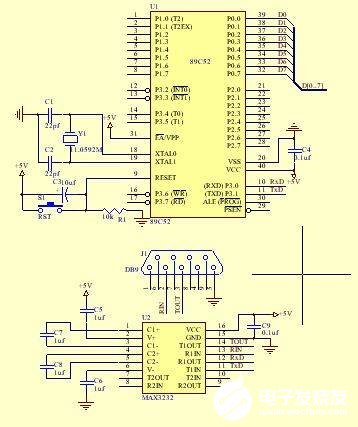
1、 AT89C52单片机芯片,用于控制串口通信。
2、 接口电平转换芯片MAX3232,用于实现TTL电平和RS-232电平的转换。
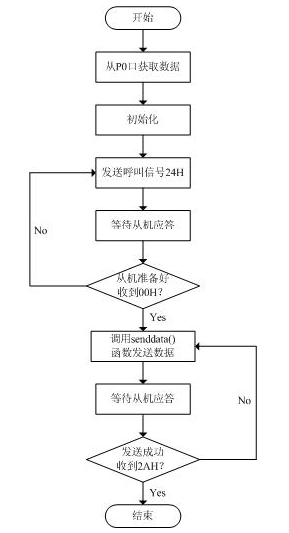
试验流程图:主机部分
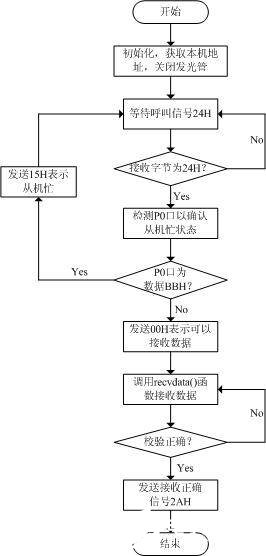
从机部分:
试验威廉希尔官方网站 图:
试验程序代码:
//PPDataR.h程序
#ifndef _PPDATAR_H // 防止PPDataT.h被重复引用
#define _PPDATAR_H
#include
#include
#define uchar unsigned char
#define uint unsigned int
/* 握手信号宏定义 */
#define CALL 0x24 // 主机呼叫
#define BUSY 0x15 // 从机忙
#define OK 0x00 // 从机准备好
#define SUCC 0x2A // 接收成功
#define ERR 0xF0 // 接收错误
#define MAXLEN 64 // 缓冲区最大长度
uchar buf[MAXLEN];
#endif
//PPDataR.c程序
#include "PPDataR.h"
/* 发送数据函数 */
uchar recvdata(uchar *buf)
{
uchar i,tmp;
uchar len; // 保存数据长度
uchar ecc; // 保存校验字节
/* 接收数据长度字节 */
RI = 0;
while(!RI);
len = SBUF;
RI = 0;
/* 使用len的值为校验字节ecc赋初值 */
ecc = len;
/* 接收数据 */
for (i=0;i
{
while(!RI);
*buf = SBUF;
ecc = ecc^(*buf); // 进行字节校验
RI = 0;
buf++;
}
*buf = 0; // 表示数据结束
/* 接收校验字节 */
while(!RI);
tmp = SBUF;
RI = 0;
/* 进行数据校验 */
ecc = tmp^ecc;
if (ecc!=0) // 如果校验错误
{
*(buf-len) = 0; // 清空数据缓冲区
/* 发送校验错误信号ERR */
TI = 0;
SBUF = ERR;
while(!TI);
TI = 0;
return 0xff; // 返回0xff表示校验错误
}
/* 发送校验成功信号SUCC */
TI = 0;
SBUF = SUCC;
while(!TI);
TI = 0;
return 0; // 校验成功,返回0
}
void init_serial()
{
TMOD = 0x20; // 定时器T1使用工作方式2
TH1 = 250;
TL1 = 250;
TR1 = 1; // 开始计时
PCON = 0x80; // SMOD = 1
SCON = 0x50; // 工作方式1,波特率9600kbit/s,允许接收
}
/* 主程序 */
void main()
{
uchar tmp = 0;
/* 串口初始化 */
init_serial();
EA = 0; // 关闭所有中断
while(1)
{
/* 如果接收到的数据不是CALL,则继续等待 */
while (tmp!=CALL)
{
RI = 0;
while(!RI)
tmp = SBUF;
RI = 0;
}
/* 检测P0口判断当前是否工作忙,若P0=0xBB,则为忙状态 */
P0 = 0xff;
tmp = P0;
if(tmp==0xBB) // 如果P0口为0xBB,发送BUSY信号
{
TI = 0;
SBUF = BUSY;
while(!TI);
TI = 0;
continue;
}
/* 否则发送OK信号,表示从机可以接收数据 */
TI = 0;
SBUF = OK;
while(!TI);
TI = 0;
/* 数据接收 */
tmp = 0xff;
while(tmp==0xff)
{
tmp = recvdata(buf); // 校验失败返回0xff,接收成功返回0
}
}
}
责任编辑;zl
-
兼容RS-232的点对点无线接口设计2011-08-04 0
-
无线数据传输u***/232/485模块2013-07-04 0
-
串口通信发展史 RS-232有哪些优点2018-10-16 0
-
如何利用RS-232接口实现与计算机实时通信?2021-06-03 0
-
RS232接口概述2022-02-16 0
-
使用自动选向控制的隔离式RS-232到RS-485转换器2022-11-23 0
-
RS-232 接口,RS-232 接口是什么意思2010-03-09 61564
-
基于RS-232的数字温度测量计的设计与实现2017-12-18 2963
-
实现RS-232数据传输的一些工业用数据链路2021-11-23 1239
-
RS-232串口通信起始位,数据位,停止位怎么区分?2023-09-12 7152
-
什么是RS-232串口?消费级电脑通常没有232串口的主要原因2024-01-09 1157
-
RS-232静电防护方案2024-08-05 403
-
RS232串口通信协议详解2024-11-21 759
-
RS232接口数据传输稳定性2024-12-18 353
-
RS232接口与其他串口的比较2024-12-19 253
全部0条评论

快来发表一下你的评论吧 !
