

汽车前照灯随动转向系统AFS是如何控制车灯方向的
显示光电
描述
汽车前照灯随动转向系统(AFS)结合汽车转向等信息实时控制车灯方向,减少盲区。该系统中步进电机的驱动芯片必不可少,本文将简单介绍AFS系统的实现,推荐两款能同时驱动两个步进电机的低边驱动芯片NCV7240和NCV7754。
一、会动的前照灯
随着技术的发展以及人们对驾驶安全的追求,汽车前照灯随动转向系统(AFS)也越来多地用在各个品牌的车身上。在以往,大部分汽车的前照灯的照射角度是固定的,当汽车在弯道上行驶时,由于光束不能偏转,会因为行驶角度问题出现一定的“盲区”,这在一定程度上会影响驾驶的安全。在光线固定的情况下,这个盲区是不可避免的,如果给汽车的前照灯加装上电机,让车灯能根据汽车转弯的方向跟着转向那就能解决这一问题,让行车更加安全。跟随汽车转向而转动的前照灯就是这里要说的汽车前照灯随动转向系统(AFS)。
图 1 无AFS和有AFS对比
当汽车转弯时AFS系统根据汽车转向盘的的转角以及瞬时车速作为控制器输入参数,根据设计的控制计算得到与车速和转向相适应的车灯转角调整车灯光束的水平方向,确保车辆在转弯时无延迟地对准即将进入行驶人视野的路面。车身会因为前后负载不同和加速减速等原因,改变纵倾的角度。所以还需要根据车身的前后桥传感器信号来调节前照灯垂直方向,以适应不同道路坡度的照明需求。
1.AFS执行器构成
一个完整的AFS系统包括主控制器,照明灯和控制照明灯调整角度的执行器,执行器主要就是驱动两个步进电机在水平方向和垂直方向控制照明灯的角度。其中驱动芯片可以使用步进电机专用的芯片,也可以使用多通道的低边驱动器,比如ON公司推出的汽车级八通道低边驱动器就很适合用于该系统。每个步进电机使用四个低边通道,这样每个八通道低边驱动器就可以驱动两个步进电机。每个执行器只需要一个MCU,一个低边驱动芯片即可对一个前照明灯进行水平和垂直方向上的控制。
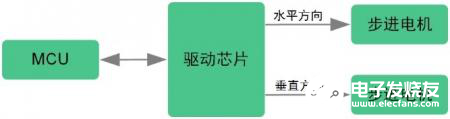
图 2 AFS执行器框图
2.低边驱动芯片介绍
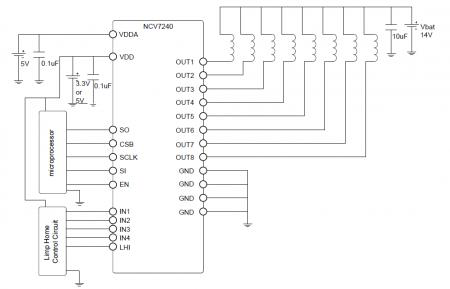
图 3 典型应用威廉希尔官方网站
NCV7240/NCV7754是车用八通道低边驱动器,每通道提供高达600 mA(NCV7754是500mA)的驱动能力。NCV7240和NCV7754的主要区别在于驱动能力,NCV7754的驱动能力稍微弱一点,其他功能基本没有差异。
通过SPI端口进行输出控制,可以方便地报告开路负载(或对地短路),过载和温度过高的故障。另外,还可以通过INx引脚对输出进行并行控制(成对)。每个输出驱动器都有电流过载保护,内部还有两个齐纳二极管保护驱动晶体管免受因为电机关闭而产生的反电动势的影响。
特点和优势
有8路驱动通道,集成度高,节省威廉希尔官方网站 板空间;
16位SPI控制能进行8位帧错误检测,进行菊花链连接;
支持PWM操作;
休眠和待机模式下静态电流低,能满足汽车模块静态电流要求;
兼容3.3V和5.0V的输入电平,适用于多种MCU接口;
能进行空载,过载和过热的故障报告;
NCV7240提供8个独立的600mA功率晶体管,其源极连接参考接地引脚,漏极连接引出到各个引脚,从而产生8个独立的低边驱动器。输出驱动器全部位于芯片的同一侧,方便PCB设计。内部带有钳位设计,可以在切换感性负载时限制瞬态电压。每个输出的过载检测电流为0.6A,内部还设置有滤波器设置了3S的延迟时间避免正常工作期间出现电流尖峰引起误操作,过流时间超过3S后,驱动器将关闭并保持锁定状态,必须要用SPI清除相关标志才能继续工作。
NCV7240包含八个独立的热传感器,位于每个输出驱动器附近。当检测器检测到过热事件(通常为175℃)时,通道将被锁存。在该通道被锁存的时候还可以操作未受影响的通道。
在芯片的EN脚使能后可以通过SPI为每个通道选择待机模式,输入模式,开启模式和关闭模式。方便MCU对驱动芯片进行控制。空载,过流和过热都可以通过SPI进行反馈,方便MCU实时了解芯片状况。
-
 cpdyx
2022-10-12
0 回复 举报请问ncv7240能代替两颗ncv70514来驱动大灯步进电机吗 收起回复
cpdyx
2022-10-12
0 回复 举报请问ncv7240能代替两颗ncv70514来驱动大灯步进电机吗 收起回复
-
汽车方向盘转角传感器2019-04-16 0
-
白光LED汽车前照灯的设计2010-12-16 659
-
汽车前照灯 小灯手动控制威廉希尔官方网站2009-09-08 6224
-
汽车前照灯闪光器2009-09-09 2496
-
汽车前照灯报警器2009-09-10 676
-
自适应前照灯控制系统(AFS)原理介绍2010-03-11 2881
-
基于模糊控制的汽车灯光随动系统2010-12-13 1444
-
智能车灯发展新趋势:AFS随动转向2011-12-27 1657
-
基于汽车大灯转向控制系统的设计应用2017-09-19 668
-
LED光源技术及白光LED汽车前照灯的光学设计2017-11-14 1139
-
关于汽车前照灯应用的开关式LED驱动器与车灯产品介绍2018-08-02 7855
-
中国汽车前照灯智能自适应照明系统的AFS大灯渗透率远高于ADB大灯2020-11-26 4520
-
汽车前照灯CAN总线多路传输系统的研究与设计2023-10-08 237
-
汽车前大灯随动转向系统(AFS)2023-11-16 307
-
汽车前照灯选择指南2024-09-24 211
全部0条评论

快来发表一下你的评论吧 !
