
资料下载


×
平台式惯导系统的力学编排详细资料说明
消耗积分:10 |
格式:ppt |
大小:0.62 MB |
2020-03-29
ah此生不换
分享资料个
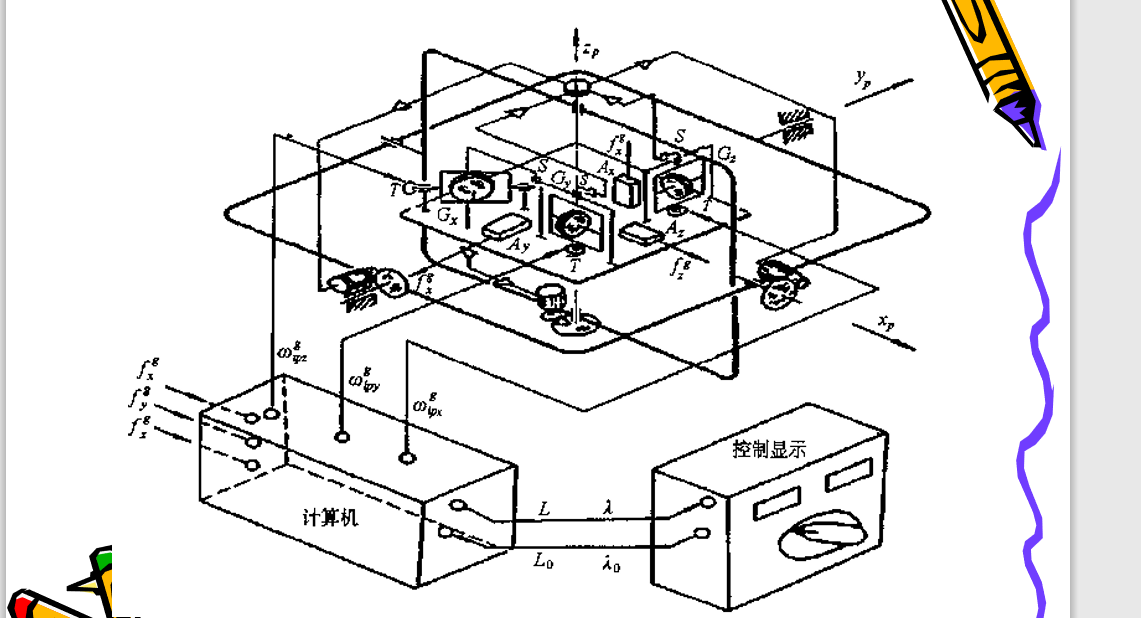
平台式惯导系统的力学编排是指实现正确控制惯性平台和解算导航参数的方案和方程,包括平台指令角速度的计算公式、速度和位置的解算方程。
平台式惯导系统必须解决两个问题:1,利用陀螺稳定平台建立一个三维空间坐标系,解决输入信号的测量基准;2,通过坐标转换,利用加速度信息求载体的速度、位置等导航信息。
根据平台坐标系的选择,平台式惯性导航系统分为半解析式惯导系统和解析式惯导系统。
半解析式惯导系统中的陀螺稳定平台建立的是当地水平基准;
解析式惯导系统中的陀螺稳定平台建立的是惯性空间基准;
半解析式惯导系统的主要特征是:两个加速度计不敏感重力加速度。根据水平坐标系的不同选择,半解析式惯导系统分为:指北方位系统、自由方位系统和游移方位系统三种 。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




