

采用ATmega128L单片机实现悬挂物体曲线运动控制系统的设计
嵌入式技术
描述
历届全国电子设计竞赛的题目可以分为电源类、信号源类、无线电类、放大器类、仪器仪表类、数据采集与处理类和自动控制类,在2005年全国大学生电子设计竞赛中,悬挂物体控制系统就是一道典型的自动控制类赛题。本文着重介绍一种基于双单片机的悬挂物体沿板上标出的任意曲线运动的控制系统方案。
1、系统设计要求和设计思路
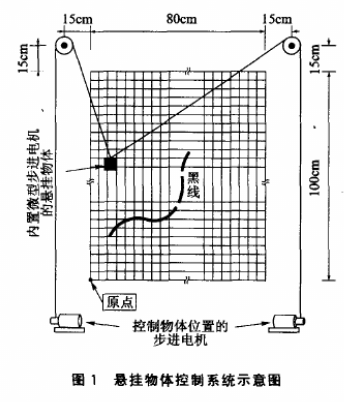
题目要求控制物体沿板上标出的任意曲线运动,如图1所示。曲线在测试时现场标出,线宽1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在200s内完成,沿间断曲线运动限定在300s内完成。
根据题目的要求,系统主要实现黑线和断点检测、悬挂物体运动控制等功能。为了说明系统可以实现任意曲线、任意方向的寻迹,以圆形轨迹作为寻迹对象。寻迹原理如图2所示。
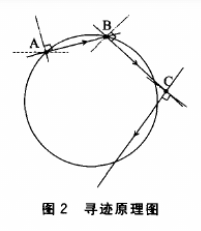
悬挂物体初始点A的坐标由键盘输入,初始时刻安装红外探头,由微型步进电机控制的摇臂处于水平位置。系统启动后,微型步进电机驱动摇臂顺时针旋转,最大转角为180°。红外探头的运动轨迹与黑色圆弧会有一个交点B,并记录步进电机转动的角度。通过系统起始点A的坐标和步进电机转动的角度,可求得运动控制下一点B的坐标。求得B点坐标后,控制悬挂物体向该点作直线运动,同时摇臂作逆时针旋转90°,以保证下一个检测交点在其180°搜索范围内。若摇臂旋转180°,仍没有交点,则认为曲线在此处有断点,系统控制悬挂物体按原方向继续前进一个步长,再次进行扫描,以求得下一个检测点的位置。若悬挂物体偏离轨迹,如图2中C点的位置,系统也可通过下一个点的检测让悬挂物体自动回复到轨迹点,因此,本方法可有效纠正轨迹偏差,实现寻迹控制的能力。
2、系统方案设计
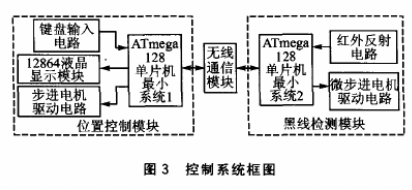
悬挂物体运动控制系统的基本方案方框图如图3所示,系统主要由控制模块、黑线检测模块和通信模块组成。其中,控制模块由ATmega128L单片机最小系统1、键盘输入威廉希尔官方网站 、液晶显示威廉希尔官方网站 和步进电机驱动威廉希尔官方网站 组成;检测模块由ATmega128L单片机最小系统2、红外线反射威廉希尔官方网站 和微步进电机驱动威廉希尔官方网站 组成。
黑线检测模块中的单片机系统控制微型步进电机,带动装有红外探头的摇臂巡回摆动,检测板上的黑线,得出微型步进电机的转动角度。角度数据经过编码后,通过无线传输模块发送给控制模块单片机系统。控制模块中的单片机系统接收到角度数据后.进行数据校验。若数据准确,则通过控制步进电机驱动威廉希尔官方网站 控制悬挂物体从当前坐标沿转动角度移动固定距离,然后,向检测模块发出下一轮检测命令;若数据传输有误,则向检测模块发出数据重发命令,等待下一轮角度数据接收。
3、硬件设计
3.1 ATmega128L单片机最小系统
单片机是整个悬挂物体运动控制系统的核心,控制系统所有威廉希尔官方网站 。本系统采用Atmel公司的ATmega128L单片机,有如下特点:
①工作电压为2.7~5.5 V,可承受的电压波动范围较大,可有效克服由于模块内的微型步进电机导致的电源电压不稳定所带来的干扰,使系统能在一个较宽的电平范围内正常工作。
②片内资源丰富。ATmega128L存储器容量大,有128 KB Flash,4 KB E2PROM和4 KB RAM,可以满足系统复杂的运算和一定量的数据存储要求;53个I/O端口,可满足系统多传感输入和多控制输出端口要求;I/O口具有大电流输出的特点,驱动能力强;内置看门狗,提高系统的抗干扰能力。
③可在线编程,方便系统的凋试。
3.2红外线反射威廉希尔官方网站
采用带脉冲调制功能的红外线反射传感器检测黑线轨迹,威廉希尔官方网站 如图4所示。威廉希尔官方网站 中锁相音频译码器LM567既作为红外线发射部分的信号发生威廉希尔官方网站 ,也作为接收部分的检测威廉希尔官方网站 ,只有检测到的输入信号的频率和本身的锁相中心频率相同时,才使输出端为低电平。该威廉希尔官方网站 容易滤除外界干扰,威廉希尔官方网站 的稳定性和抗干扰能力强,同时可以调节译码器不同的中心频率,使得在同一设备使用多个红外线传感器而不会相互干扰。

3.3步进电机驱动威廉希尔官方网站
控制系统中的电机采用VEXTA公司的PX245-01A步进电机,额定电压4 V,静态电流1.2 A,步距角1.8°。步进电机的驱动威廉希尔官方网站 如图5所示。达林顿管起功率放大作用,增强步进电机的驱动能力。威廉希尔官方网站 中使用光电耦合器将控制和驱动信号加以隔离,有效降低外部干扰对系统的影响,提高系统的可靠性。

3.4输入与显示威廉希尔官方网站
本设计采用4×4矩阵扫描非编码键盘方式实现悬挂物体初始点坐标输入和控制命令输入。系统控制参数和悬挂物体运行轨迹图可在点阵式液晶LCD12864显示。
3.5无线通信模块
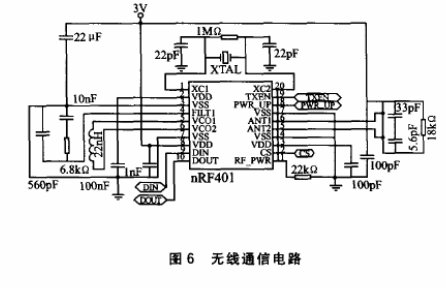
本没计采用无线Modem RF2000实现系统检测模块与系统控制模块之间数据和命令的双向传输,威廉希尔官方网站 如图6所示。RF2000采用Nordic公司的nRF401芯片,采用抗干扰能力强的FSK调制方式,可以通过TXEN引脚控制收发方式。无线传输过程中,容易受到外界电磁波和步进电机转动产生的电磁干扰,而出现较高的误码率。为确保数据传输的可靠性,本设计通过编码加强系统的纠错能力。数据或命令以8位数据,即一个字节进行编码,并分为高4位和低4位进行无线传输。以低4位数据的传输为例。其发送的数据结构各位的定义格式如下:

该传输进行了两级误码校验。DO~D3是传输数据的低4位数据,D4~D6置O,D7为低4位数据的CRC检验。
4、软件设计
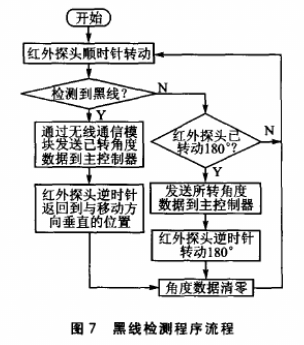
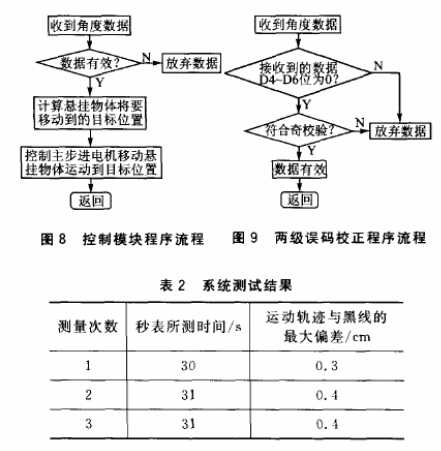
系统中悬挂物体寻迹采用双单片机控制方案,黑线检测模块和悬挂物体控制模块各自具有单片机系统,通过通信模块实现协同控制,完成悬挂物体寻迹任务。黑线检测程序流程和控制模块程序流程分别如图7和图8所示,通信误码校正流程如图9所示。
5、测试方法与结果
为了使悬挂物体可以沿任意曲线运动,本系统采用圆周曲线作为测试途径。圆周曲线包含4个方向的转折点,具有一定的代表性,圆周直径为30 cm,圆周长约94 cm,大于设计要求的80 cm。测试结果如表2所列。
结语
本设计以2片ATmega128L单片机分别为黑线检测和悬挂物体运动控制的核心,仿照雷达扫描跟踪系统,利用微型步进电机和红外线传感器进行黑线的扫描跟踪,实现系统的连续黑线和断续黑线寻迹。黑线检测和运动控制两个核心通过无线数传模块实现检测数据和控制命令的相互通信。测试结果表明,本系统控制精度高,响应时间短,具有较强的断线寻迹能力。
责任编辑:gt
-
基于ATmega128L单片机和无线互联网的多功能机器车2011-03-04 0
-
基于凌阳16位单片机SPCE061A悬挂运动控制系统2011-03-07 0
-
基于双单片机的悬挂物体寻迹控制系统2011-08-19 0
-
ATMEGA128L中用什么代替GICR??2016-07-17 0
-
怎么设计悬挂运动控制系统?2019-08-12 0
-
怎么采用Verilog FPGA设计悬挂运动控制系统的控制器2021-05-06 0
-
Atmega128L单片机的电脑串口接收效果怎样?2021-07-08 0
-
Atmega128L控制ADS7816进行AD采集2021-09-24 0
-
求一个Atmega128L单片机在IAR for AVR中的串口1收发数据的例程2021-11-02 0
-
ATmega128L中文资料pdf2008-12-21 2314
-
基于Atmega128L的大容量MP3播放机2009-04-15 482
-
ATmega128L单片机的MicroSD卡读写2011-11-02 1591
-
悬挂运动控制系统资料2016-10-12 812
-
使用Atmega128L单片机控制ADS7816进行AD采集的程序免费下载2019-08-05 1162
-
如何使用单片机进行悬挂运动控制系统的设计2019-05-05 752
全部0条评论

快来发表一下你的评论吧 !
