

基于数字信号处理器和GPS技术实现PMU测量系统的设计
处理器/DSP
描述
随着全球卫星定位系统(GPS)的广泛应用,基于GPS的实时相量测量装置PMU(Phase Measurement Unit)很好地解决了电力系统广域空间同步测量的问题,并形成了电网广域测量系统WAMS(Wide Area Measurement System)。PMU在全网统一的时间坐标系下(通过接收GPS的同步时钟信号),对电力系统不同节点的电压和电流进行同步采样,通过数据处理生成各节点电压、电流的正序相量,由GPS给每个相量打上时间标签,然后将这些信息实时传送到控制中心。控制中心在统一的时标下,根据各个PMU的测量信息对电力系统的状态进行分析,进行全电网的稳定控制、事故预警等。
本文提出的PMU构成方案,充分利用了数字信号处理器DSP(Digital Signal Processor)的集成资源,采用双CPU结构,以GPS秒脉冲为同步时钟信号,结合高速14位A/D芯片进行采样,并以USB 2.0接口、CAN总线接口和以太网接口相结合的通信方式实现高速、大容量的数据传输。软件没计采用μC/OS-II实时操作系统,保证了装置的实时性和可靠性。
1 PMU的构成与硬件实现
作为WAMS的关键组成部分,实时性和可靠性是最重要的,因此PMU的设计也应以此为依据。PMU的原理框图如图1所示。
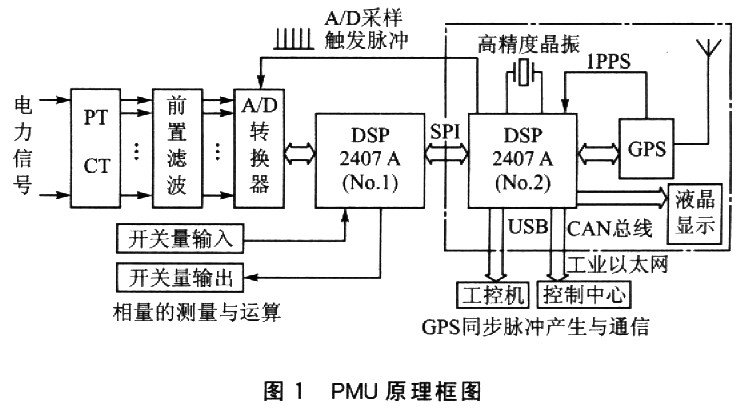
来自PT/CT二次侧的电信号经前置滤波,变为适合DSP处理的小信号。然后,根据GPS输出的同步时钟秒脉冲(PPS)经DSP(No.2)内部的捕获单元产生满足时间同步和频率同步要求的异地同步采样信号,启动A/D转换。DSP(No.1)根据变间隔的递归离散傅里叶变换(DFT)算法,每出现一个新的采样数据窗计算一次被测量信号的基波分量,然后利用GPS给相量信息加上全网统一的“时间标签”。
DSP(No.1)与DSP(No.2)之间采用同步串行接口(SPI),实现无缝接口连接。DSP(No.2)利用液晶显示器实时显示数据和波形,以便在不必配置本地上位机时组成最小的监测单元。USB接口接本地上位机,同时也可以作为扩展口留作本地数据的携带转移。通过CAN总线和工业以太网相结合的方式实现PMU与控制中心的数据传输。下面就关键的几个部分加以详述。
1.1 相量数据采集模块
PMU的核心CPU采用TI公司的TMS320LF2407A(简称为“2407A”)芯片。主要原因在于其体积小,处理速度快,适于快速傅里叶(FFT)运算,并且片内集成了CAN、SPI等总线控制器,适于控制系统。
A/D采样威廉希尔官方网站 是相量数据采集模块的重要组成部分之一,同步相量测量对于A/D转换部分的精度有着较高的要求。IEEE-1344和C37规范提供了如下公式,用于计算实际所需的A/D转换有效位数:

式中:Minimum resolution为所需A/D转换的最小有效位数,Fs为模拟量最大变动倍数,Emin为幅度计算的精度要求。
电力系统中电压的最大变动倍数通常在1.5倍以内,而电流的动态范围却很大,轻载运行时可能为额定值的10%,短时过载时可能为额定值的2~3倍,而故障时将可能达到额定值的40倍。考虑到在故障情况下的相量测量并不是非常有意义(故障情况下的相量计算结果将出现相角的跳变,与实际系统不吻合),因此,IEEE规定了电流测量的有效范围为额定负载的10%至额定负载的3倍,FS-30,当Emin=1%时,A/D转换有效位数为13.05位。
相量数据采集模块的速度与精度直接影响整个相量测量系统的性能。要实现高速数据采集,除了要有高性能的A/D转换设备,同时还需要有高速数据传输总线。从上述分析可以看出。同步采集卡的A/D转换部分要求达到13位有效精度,因此必须采用14位以上的A/D芯片方能满足要求。这部分采用14位A/D转换芯片AD7865(采样频率为3200Hz),而不用2407A芯片自带的10位A/D,主要是考虑精度的问题;芯片AD7865为并行接口方式,而2407A的高速数据总线可以与其匹配。在进行A/D采样时不采用多通道依次扫描的工作方式,而采用配置高速采样/保持器的工作方式。为了保证系统的多路模拟输入通道的同步采样,首先要在模块的前端为每个通道配置1个采样/保持器,在采样触发脉冲到来时可同时对全部通道的模拟信号采样/保持。本文采用AD783采样/保持器来实现。相量的处理充分利用DSP的特性,进行递归DFT运算并实现频率跟踪。
1.2 GPS授时模块
解决同步采样脉冲产生的问题是实现同步相量测量单元子站的关键技术之一。GPS授时模块主要负责同步采样触发脉冲的产生和精确的授时功能。它从GPS接收机的串行口接收数据并提取当前标准时间,同时接收GPS的秒脉冲信号(PPS),并由DSP(No.2)的30MHz时钟频率倍频,产生用于触发A/D进行转换的脉冲,以实现每周波采样64点。高精度(1μs同步精度)的GPS时钟源是同步相量测量技术的基础。为了降低对GPS的依赖性,采用高精度抗干扰自同步技术,由DSP(No.2)自身高精度晶振提供相当精确的秒脉冲,在短时失去GPS信号或GPS信号受到强干扰情况下实现高精度授时。
1.3 数据的通信传输模块
数据的通信传输模块采用USB2.O技术实现高速度实时数据的传输。USB是一种新的、双向的、同步传输并可热插拔的点对点数据传输总线,具有同步带宽、灵活稳定、易于安装等优点。其传输速度最高可达480Mbps,远高于一般的串行总线接口。传统的RS-232、RS-485传输速度较慢,且安装麻烦,已不能满足此要求。PCI总线虽然速度较快,但安装麻烦,也小易实现本地数据的携带转移。利用USB接口传输速率大、时延小、差错率极低的特点,能有效、快速地完成PMU实时测量数据高速上传以及工控机对PMU的操作与控制。
CAN的直接通信距离最远可达10km,通信速率最高可达1Mb/s(通信距离小于40m时)。CAN节点在自身发生错误时有自动关闭功能,不会影响其他节点的正常工作。由于DSP(2407A)集成有CAN模块,所以实现比较方便。
针对PMU数据通信的高速、实时的特点,采用EZ-USB SX2系列的CY7C68001芯片与DSP(No.2)结合,实现PMU与现场上位机(工控机)之间测量数据的实时传输。另一部分是PMU与控制中心的通信。这部分采用CAN总线和工业以太网相结合的方式。
2 PMU的软件平台
为了提高数据采集系统的实时性与可靠性,采用μC/OS-II实时操作系统平台,并在此平台上开发了USB设备驱动程序、模拟量幅值与相位计算等程序。
μC/OS-II是一种可移植、可裁减、占先式的实时多任务操作系统。其绝大部分代码是用ANSI C编写的,只有小部分与硬件相关的代码是用汇编语言编写的,易于移植。μC/OS-II功能强大,支持56个用户仟务,支持信号量、消息邮箱、消息队列等多种常用的进程间通信机制,可剥夺实时内核使得任务级系统响应时间得到最优,而响应时间是可知的,很适合于对实时性要求比较高的系统。现已成功应用到很多领域,其稳定性与可靠性已经得到检验。2000年7月,μC/OS-II通过非常严格的测试,取得了美国航空管理局(FAA)的认证,说明它可用于与人性命攸关的安全重要系统。
TMS320LF2407满足μC/OS-II移植的条件,TI公司提供的编译器Code Composer也支持C语言和汇编语言开发,本文在此平台七进行操作系统移植和软件开发。μC/OS-II操作系统的组成义件分为3类:与处理器无关的代码文件;与处理器有关的代码文件,以及μC/OS-II与应用相关的设置文件。当然,移植工作完成后编写应用程序,还应包括应用文件。移植所需要做的工作仅仅是修改部分与处理器有关的文件。这类文件包括:OS_CPU.H、0S_CPU_A.ASM、OS_CPU_C.C三个文件。
在本应用中,笔者建立了7个应用任务,优先级分别为4、5、6、7、8、9、1O;同时为每个任务分配了一个消息邮箱,使用基于消息邮箱事件的通信机制进行任务间通信与任务切换。整个软件的基本结构如图2所示。
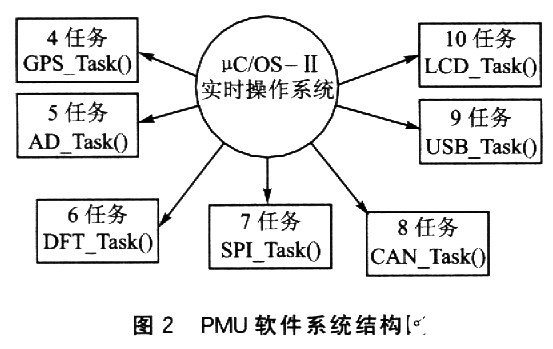
任务AD_Task():DSP(N0.1)采样电压、电流信号。分配邮箱:pAd_Mbox。
任务DFT_Task():DSP(No.1)进行相量递归DFT计算。分配邮箱:pDFT_Mbox。
任务SPI_Task():DSP(No.1)通过SPI总线向DSP(No.2)发送相量数据和有功、无功信息。分配邮箱:pSPI_Mbox。
任务USB_Task():DSP(No.2)通过USB总线向上位机传送相量数据和有功、无功信息。分配邮箱:pUSB_Mbox。
任务CAN_Task():DSP(No.2)通过CAN总线在工业以太网传送相量数据和有功、无功信息。分配邮箱:pCAN_Mbox。
任务GPS_Task():DSP(No.2)配合GPS的秒脉冲实现高精度授时功能并启动A/D转换。分配邮箱:pGPS_Mbox。
任务LCD_Task():DSP(No.2)通过液晶模块实时显示信息。分配邮箱:pLCD_Mbox。
由上节对堆栈的分析可知,任务栈最少需要25个地址。笔者为每个任务分配了100个地址(200字节)的任务栈空间。使用函数OSTaskCreate()创建各任务。该函数的第三个参数为栈顶地址.为OSTaskStkInit()所调用。要注意,2407A的堆栈是递增的,故应传递任务栈的最低地址;而又由于任务程序是采用C语言编写的,编译器对ARl的偏移范围可能会超过任务栈栈顶。虽然在这种情况下ARl是可恢复的,但仍可能会影响最低地址之前的地址内容。所以笔者建议对其进行适当后移。
幅值与相角计算程序得到采样数据后,利用离散傅里叶算法(DFT),可分别计算出每路电压、电流信号的幅值与相位,生成相量形式的电压与电流数据。
结语
本文设计的PMU,硬件上采用了嵌入式微处理器DSP的双CPU结构,软件上采用μC/OS-II操作系统。通过μC/OS-II管理各个功能模块之间的任务调度、中断处理、信息的交互等操作,使整个系统具有高实时性、高可靠性、可热插拔等特点;同时也提高了软件开发的效率,缩短了开发周期。同步相量测量单元的研制是一个复杂的课题,其实现还存在很多难点。本设计只涉及其中一部分,许多通信环节及同步相量的高级应用问题还需在令后的工作中进一步完善和提高。
责任编辑:gt
-
数字信号处理器的特点2020-12-09 0
-
数字信号处理器DSP技术入门(附送算法设计与系统方案)2011-02-17 0
-
哪位大神关于《数字信号处理与数字信号处理器》的DSP论.....2014-05-27 0
-
利用FPGA怎么实现数字信号处理?2019-10-17 0
-
定点数字信号处理器(DSP)技术与应用2010-04-07 562
-
数字信号处理器(DSP)2010-01-04 3498
-
广域测量系统中PMU的通信方案2011-09-26 679
-
DSP是什么?详解DSP又称数字信号处理器2017-05-18 48239
-
Builder数字信号处理器的FPGA设计2017-10-31 965
-
简单介绍数字信号处理器的特点2018-10-29 10007
-
什么是数字信号处理器以及它的用处2019-08-26 5077
-
数字信号处理器(DSP)简介2022-08-02 19049
-
数字信号处理器的常见故障2023-05-31 3156
-
数字信号处理器概论2023-08-07 3891
-
数字信号处理器的特点、作用及种类2024-05-22 2453
全部0条评论

快来发表一下你的评论吧 !
