

基于FPGA的微型红外热电堆探测器空间应用研究
描述
摘要:红外地球敏感器是卫星控制分系统的重要姿态测量部件,提供卫星相对于地球辐射圆盘俯仰和滚动方向的姿态信息。为进行新一代微型红外地球敏感器研制,开展了基于FPGA的微型红外热电堆探测器空间应用研究,介绍了红外热电堆技术,采用探测器技术指标,对探测器的圆环效应、温度补偿、响应补偿、非均匀校正、盲元处理进行了研究,实现了红外地球敏感器图像处理系统的方案设计与FPGA设计。测试结果表明,姿态测量偏差小于0.2°,基于FPGA微型红外热电堆探测器设计,能够应用于卫星姿态测量,具有小型化、低功耗、低成本特点,具有替代传统机械扫描式红外地球敏感器潜力,具有广阔的应用前景。
0引言
红外地球敏感器通过测量卫星相对于地球位置确定姿态,作为一种测量部件被广泛应于卫星控制系统。主要由光学系统、探测器、图像处理与姿态解算等部分构成。
随着商业航天与小卫星发展,对红外地球敏感器的小型化、低成本、低功耗方面提出迫切需求。传统的机械扫描式产品体积、重量与功耗都较大,且扫描机构长时间运行后,会产生偏差,降低产品工作寿命。
开展面阵静态红外地球敏感器研究十分必要,本文探索使用微型红外热电堆探测器,对探测器的圆环效应、温度补偿、响应补偿、非均匀校正、盲元处理进行了研究,实现图像处理系统的方案设计与FPGA设计,完成新一代微型静态红外地球敏感器设计。
1红外热电堆技术
红外技术目前在军事领域和民用领域,都发挥着重要作用。其中红外探测器是红外技术的核心部件,根据探测器工作原理,可分为热探测器和光子探测器两大类。
本文研究的红外热电堆探测器属于热探测器,其工作原理是基于塞贝克效应。两种具有不同逸出功的电导体或半导体材料相互串接构建的闭环回路,两个接触点中温度较高的一端通常被称作“热结”,较低的一端被称作“冷结”,如图1 所示。材料中载流子沿着温度梯度降低的方向移动,引起电荷积累在冷结处,此时回路中便有热电势产生,多对热电偶相互串接就结合为一个热电堆。
产生的温差电动势Vout,其数学表达式为:

式中:A和B分别为材料A和B的塞贝克系数;AB是两种材料的塞贝克系数差值。
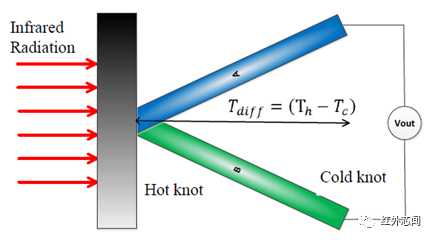
图1 塞贝克效应示意图
红外热电堆探测器,具有如下的优点:
①工作环境无需制冷,室温工作,具有小型化、低成本特点;
②检测的光谱范围宽,能够响应全波段的红外辐射;
③与标准IC工艺兼容,稳定性好,易于生产,信号处理威廉希尔官方网站 较容易实现;
④使用时外围配置威廉希尔官方网站 简单,无需斩波,无需偏置电压,有利于系统设计简化。
可以应用于红外成像、非接触测量、空间气候探测、卫星姿态测量等方面。
2热电堆探测器指标
本文研究使用的红外热电堆探测器为HEIMANN Sensor公司的HTPA80x64d型探测器。器件结构如图2所示。
图2 探测器结构图
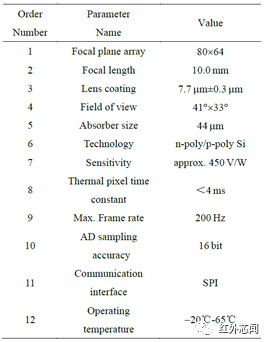
HEIMANN Sensor公司主要从事红外热电堆传感器、成像阵列等方面的研制与生产。本文研究使用探测器为其新型快响应面阵产品,基本参数信息如表1所示。
表1 HTPA80x64d型红外探测器基本参数
3红外图像数据处理
3.1探测器圆环效应
光电探测器主要由光学部分和电学部分组成,光学部分将目标的光信息通过光学元件,照射到光电敏感单元,敏感单元将光信号转换为电信号,电学部分进行信号调理、检测、采样、数据处理、数据存储、输出图像信息。
红外光线在经过光学系统传输后,由于不同能量组分的干涉效应,在光电敏感元件表面形成能量分布,以光轴为中心,按规律分布。而产生了在不同温度下的探测器输出的圆环效应,会导致图像的低频非均匀性,这种非均匀性噪声一般比较固定。
使用探头在不同黑体温度下进行测量,发现在25℃时几乎不存在圆环效应,而偏离25℃越远,则圆环效应越大。测试过程中黑体充满整个视场,结果如图3所示。
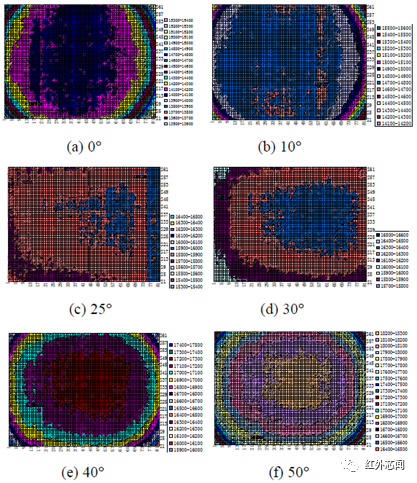
图3 探测器不同黑体辐射温度圆环效应
3.2图像补偿算法
红外热成像系统接收目标发出的红外辐射,通过光电信号处理,以图像形式输出。成像结果会受到以下3方面影响:
①与被测目标的发射率、环境温度、背景辐射、测温距离、大气温度、大气衰减等因素相关。
②与探测器的制备工艺相关,如各敏感单元的结构尺寸、转换效率、掩膜误差、材料缺陷等不一致性。
③与探测器内部电气元件的温度响应相关,存在温度漂移与响应非线性特点。
探测器不同敏感单元,在相同的辐照度下存在不同的响应特性;同一敏感单元,在不同温度环境下存在不同响应特性。
为了提高红外图像准确度,针对以上关键影响因素,建立补偿模型,进行图像补偿处理。包含温度补偿、响应补偿。
完成图像补偿处理的具体步骤如下。
1)环境温度计算
探测器的环境温度由公式(2)计算得到:

式中:
,为温度测量平均值;PTATgradient为温度计算梯度;PTAToffset为温度计算偏移量。
2)图像温度偏移补偿计算
图像数据温度偏移补偿,由公式(3)计算得到:

式中:Vij_Comp为温度偏移补偿后图像值;Vij为探头读出原始图像值;ThGradij为温度补偿梯度。ThOffsetij为温度补偿偏移量。gradscale为温度补偿梯度的缩放系数。
3)像元响应偏移补偿计算
像元响应偏移补偿,由公式(4)计算得到:

式中:Vij_Comp*为环境温度偏移补偿和像元响应偏移补偿后电压;elOffsetij为像元响应偏移量。
3.3图像非均匀校正
非制冷红外焦平面的非均匀性校正方法基本可分为两类:基于标定技术的算法和基于场景技术的算法。基于场景技术的校正算法,理论性较强,硬件实现难度较大。基于标定技术的校正算法,结构简单,易于硬件实现,具有较好的适应性与有效性。标定校正方法,是通过使用均匀的高温、低温黑体,对红外焦平面标定,计算出增益和偏移系数,是一种有效实用的算法。常见有两点法和扩展两点法,本文使用两点法对红外图像进行非均匀校正。
两点校正法应用的前提条件:探测器敏感单元的响应特性①在使用的温度范围内,为线性变化;②在使用时间范围内,受随机噪声影响小,具有稳定性。
根据地球大气14 ~ 16 μm红外辐射谱段,地球平均等效黑体温度约为247 K,空间背景温度约为4 K。利用普朗克公式计算光谱辐射能量差,当环境温度为25 ℃,地球模拟辐射圆盘温度为66.8 ℃。红外地球敏感器在空间工作环境中,会进行温度控制,选取典型的工作温度25 ℃,对探测器的输出响应进行测量,如图4所示,计算得到非线性误差为2.26%。
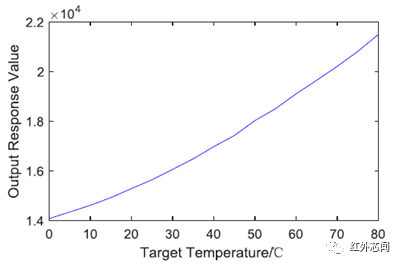
图4 探测器输出响应曲线
在探测器工作温度范围0℃ ~ 45℃,探测目标温度范围0℃ ~ 80℃,探测器输出响应的非线性误差在1.3 ~ 4.6%之间。
在探测器工作温度范围0℃ ~ 45℃,对同一均匀温度黑体进行标定测量,输出响应在时域上较为稳定,存在一些随机噪声,通过平滑滤波后,可以消除噪声影响。在探测器工作温度25℃,探测目标温度20℃和40℃,连续进行1000次图像数据采集,结果如图5所示。
图5 探测器连续输出响应
因此,本文使用的探测器,能够基本满足两点校正法应用的两个前提条件。
根据线性模型数据公式,两点校正的具体方法为:用一个高温黑体T1和一个低温黑体T2作为标定源,测量探测器敏感单元响应。
根据式(5)、(6),计算得到每个敏感单元的增益校正系数Gij与偏移校正系数Oij:
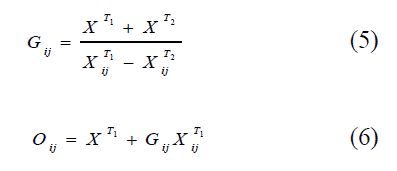
式中:XijT1和XijT2为敏感单元ij在高温T1和低温T2的响应值。XijT1和XijT2为探测器在高温T1和低温T2的响应均值。
根据式(7),进行实时非均匀校正:

式中:Xij为探测器输出图像数据;Yij为非均匀校正后图像数据。
3.4图像盲元处理
红外焦平面探测器在生产制备过程中,受半导体材料与制作工艺影响,有的敏感单元会存在响应率过高或过低的现象,称为盲元,使红外图像存在黑白噪点。在探测器使用过程中,受使用环境应力与器件自身寿命影响,盲元数量可能会增加。温度补偿和非均匀校正能够起到一定补偿效果,但无法完全消除盲元影响。
盲元在红外图像中形成亮点或暗点,可能会对红外图像目标检测识别造成较大影响。
盲元或死像元可以通过线性插值法进行补偿替换。一般采用盲像元相邻的同一行或同一列的2个像素点,或者周围9个像素点数据,进行线性插值计算,用计算后的值对盲元替换。
本文采用的补偿方法是用盲元临近的九宫格,选择部分点进行线性插值计算,来替换盲像元的值。如图6所示,临近点像元相应位为1则表示使用该像素点,为0则表示不采用。如果盲元为边缘点,则在图像边界外的位置的值不会为1。
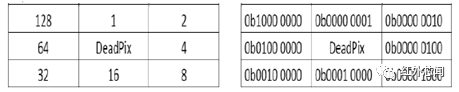
图6 盲元线性插值补偿
经过对盲元替换处理,有效避免盲元点对红外图像进行姿态解算带来的影响,提高了红外图像的质量,使探测器在长工作时间,红外图像能够保持较好的均匀性。
4系统方案设计
4.1系统设计
微型红外热电堆图像处理系统平台主要包含3路探测器,CPU及其周边威廉希尔官方网站 ,FPGA威廉希尔官方网站 ,乒乓SRAM威廉希尔官方网站 ,EEPROM威廉希尔官方网站 ,接口通讯威廉希尔官方网站 等组成。图7所示为原理框图,图中箭头表示信号与数据流向。主要分为两大部分,以FPGA为核心的图像数据接收与处理部分,以CPU为核心的主流程控制与姿态结算部分,在器件选型方面选择具有抗辐照指标的高可靠元器件。
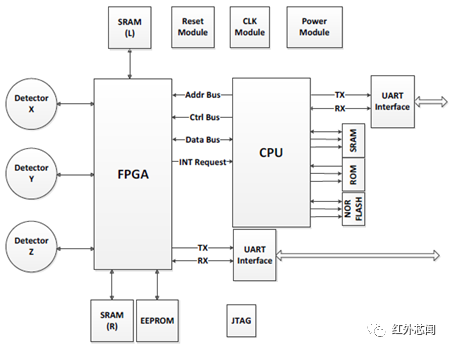
图7 图像处理系统原理框图
FPGA主要完成三路探头数据接收,原始红外数据排序,图像数据补偿,非均匀校正,盲元数据处理,乒乓SRAM数据处理,通讯控制等功能。
乒乓SRAM用来缓存图像接收、图像处理过程数据,使图像数据处理与姿态结算流水同步操作。
EEPROM用来存储补偿参数,非均匀校正参数,盲元处理参数,操作指令等信息。关键参数与指令内部通过三取二冗余存储与校验,实现容错处理功能。
CPU主要完成图像梯度计算、地球边界分析、姿态计算、工作流程控制、通讯控制等功能。外围存储器包括数据存储器SRAM、BOOT程序存储器ROM、扩展程序存储器NOR Flash。
红外图像处理系统上电后,进行硬件自检及资源初始化。按照控制周期,实现对三路探头数据接收、图像数据预处理、图像信息解算等流水操作,得到姿态信息。
4.2 FPGA设计
在图像处理系统中,FPGA作为核心功能单元,功能框图如图8所示,图中箭头表示信号与数据流向。红外图像处理系统上电后,FPGA对3路红外探测器完成初始化配置。按照控制指令,接收探测器原始图像的灰度数据,对图像数据按图幅进行数据排序,并且乒乓缓存入SRAM中。
然后对图像数据进行流水处理,完成图像数据温度补偿,响应补偿,非均匀校正,盲元处理,将处理好的图像数据再次缓存入乒乓SRAM中。
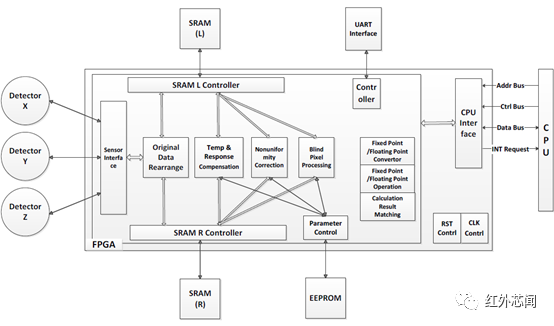
图8 图像处理FPGA设计功能框图
FPGA内部集成定点转浮点处理单元、浮点数据四则运算单元、浮点转定点处理单元。从探测器输出图像数据为定点数据,先转换为浮点数据,进行数据处理后,再转换为定点数据。
数据处理过程与MATLAB计算结果按步骤依次比对,定点处理部分结果一致,浮点处理部分精度为小数点后两位(十进制下),基于FPGA图像数据处理符合设计要求。
在FPGA集成编译工具下,使用工具内嵌逻辑分析仪,对图像数据处理过程波形抓取。三路探头数据接收如图9所示,图像数据处理如图10所示。
5实验结果与分析
为验证所设计的图像补偿算法、非均匀校正、盲元处理能够满足空间应用需求,开展了红外成像实验。图11为实验室内成像,(a)为探测器输出原始数据图像,(b)为完成图像补偿和非均匀校正后图像,(c)为完成盲元处理后图像。从图中可以看出,(a)中图像非均匀性及噪声非常明显,基本无法辨认图像信息,(b)中图像在处理后非均匀性大大降低,图像质量得到非常明显提升,(c)中图像的盲元黑点完成插值替换,消除对后期进行图像信息解算的影响。
图12为模拟探测器在空间中对地球辐射圆盘边界成像,(a)为探测器输出原始数据图像,(b)为完成图像补偿和非均匀校正后图像,(c)为完成盲元处理后图像。实验结果显示,红外探测器原始图像,经过图像处理后,地球辐射圆盘边界能够清晰成像。
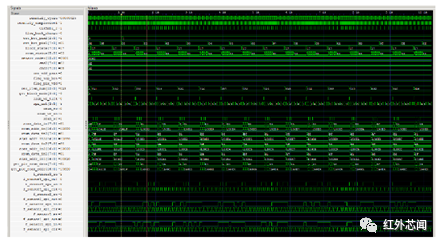
图9 三路探测器数据接收
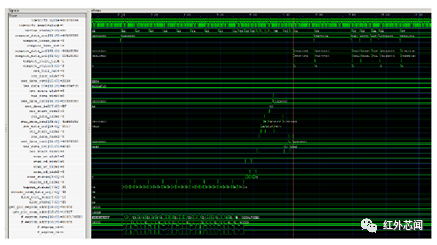
图10 图像数据处理
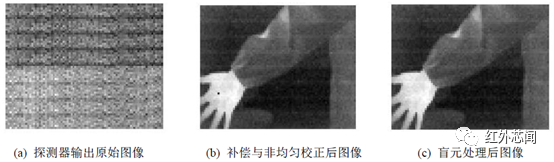
图11 实验室内图像采集
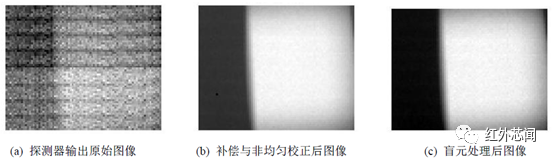
图12 模拟地球辐射圆盘边界图像
对完成补偿运算、非均匀校正、盲元处理的图像数据,进行非均匀性评估,非均匀性由公式(8)计算得到:

式中:YSTD为像元输出响应标准差;Y为像元输出响应均值。
在红外地球敏感器工作温度范围0℃ ~ 45℃,红外图像数据非均匀性在0.72% ~ 1.43%之间,地球辐射圆盘成像边界清晰平滑,能够进行姿态解算。
使用三路探测器图像数据,进行数据融合与姿态解算。通过图像数据点梯度计算,完成地球辐射圆盘边缘提取;求取边缘点的空间坐标映射,完成地球圆心位置提取。测试结果表明,姿态测量偏差小于0.2°,基于FPGA的微型红外热电堆探测器图像处理系统,能够应用于卫星姿态测量。
6结论
本文提出了一种基于FPGA的微型红外热电堆探测器图像处理系统,对探测器的圆环效应、图像温度补偿、响应补偿、非均匀校正、盲元处理进行了研究。介绍了红外图像处理系统的方案设计、FPGA设计,对最终的图像处理结果进行了分析,姿态测量偏差小于0.2°。表明基于FPGA的微型红外的热电堆探测器设计能够应用于卫星姿态测量,基于该系统设计的红外地球敏感器为全数字处理方案,体积、重量约为传统机械扫描式产品的1/3,成本极大降低,满足小型化、低功耗、低成本需求,可以替代传统机械扫描式红外地球敏感器,具有广阔的应用前景。
原文标题:基于FPGA微型红外热电堆探测器空间应用
文章出处:【微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
-
红外探测器2019-04-16 0
-
MEMS热电堆传感器的红外探测系统_王司东2017-03-19 1590
-
热探测器分类2018-12-19 5515
-
红外线探测器工作原理2019-02-27 23032
-
红外线探测器距离_红外线探测器安装2019-12-06 13874
-
基于MEMS热电堆红外传感器的红外探测系统2020-09-13 5609
-
被动式红外探测器和主动式红外探测器有什么区别2020-12-24 4177
-
红外线探测器原理_红外线探测器怎么安装2021-01-12 6459
-
红外探测器——热探测器详解2022-11-08 2786
-
红外探测器的分类2023-07-11 2239
-
红外探测器:热探测器与光子探测器2023-07-19 2157
-
红外探测器有几种?如何划分?2023-08-02 2410
-
热电堆红外传感器的原理和结构2023-10-26 3453
-
被动红外探测器和主动红外探测器的区别2024-09-20 1166
-
被动红外探测器与主动红外探测器的原理比较2024-09-20 1009
全部0条评论

快来发表一下你的评论吧 !
