

电容性负载稳定性问题的探究和解决方案
模拟技术
2432人已加入
描述
鉴于反馈通路中相移(或者称作延迟)引起的诸多问题,我们一直在追求运算放大器的稳定性。通过上周的讨论我们知道,电容性负载稳定性是一个棘手的问题。
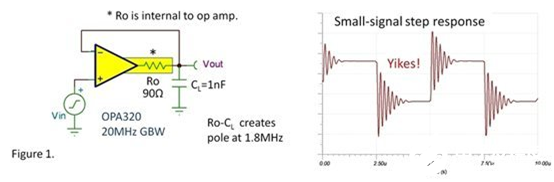
“麻烦制造者”运算放大器开环输出电阻 (Ro),实际并非运算放大器内部的一个电阻器。它是一个依赖于运算放大器内部威廉希尔官方网站 的等效电阻。如果不改变运算放大器,也就不可能改变这种电阻。CL为负载电容。如果您想驱动某个 CL,您就会受困于 Ro 和 CL形成的极点频率。G=1 时 20MHz 运算放大器的反馈环路内部 1.8MHz 极点频率便会带来问题。请查看图 1。
对于这个问题,有一种常见解决方案—调慢放大器响应速度。想想看,环路具有固定的延迟,其来自 Ro 和 CL。为了适应这种延迟,放大器必须更慢地响应,这样它才不至于超过去,错过希望获得的终值。
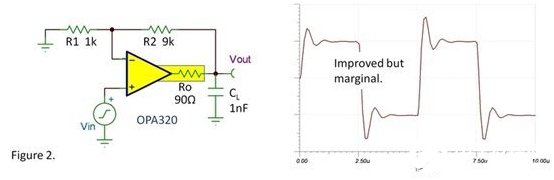
减速的一种好办法是,将运算放大器放置在更高的增益中。高增益降低了闭环放大器的带宽。图 2 显示了驱动相同 1nF 负载但增益为 10 的OPA320,其小步进值的响应性能得到极大提高,但仍然很小。将增益增加到 25 甚至更大,似乎相当好。
但是另一个问题出现了。图 3 增益仍为 10,但增加了 Cc,其将速度又降低了 1 位。Cc 过小时,响应看起来更像图 2。Cc 过大时,可能出现问题,其看起来更像图 1。
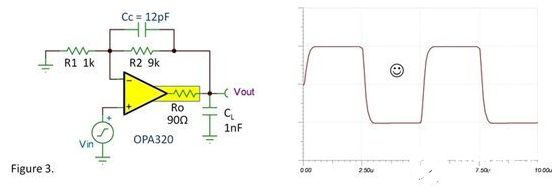
恰到好处地补偿,可解决“靠近速率”问题——波特图分析。
责任编辑:gt
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何实现电容性负载的稳定性?2021-04-21 0
-
“驯服”振荡之电容性负载的稳定性2018-09-26 0
-
噪声增益及CF如何实现电容性负载的稳定性?2021-04-06 0
-
请问如何测试运算放大器电容性负载的稳定性?2021-04-13 0
-
怎样去解决电源/负载威廉希尔官方网站 的稳定性问题?2021-05-11 0
-
AD8675能带多大电容负载,稳定性如何考虑呢?2023-11-14 0
-
电容性负载的稳定性2009-09-25 919
-
电容性负载的稳定性—具有双通道反馈的RISO2009-09-25 601
-
电容性负载稳定性:噪声增益及CF2009-09-25 739
-
电容性负载稳定性:RISO、高增益及CF、噪声增益2009-09-25 644
-
运算放大器稳定性第6部分电容性负载稳定性:RISO、高增益及2010-03-17 747
-
放大器驱动容性负载对稳定性的影响2021-02-13 2500
-
电阻型放大威廉希尔官方网站 的稳定性问题2022-12-01 1584
-
驱动容性负载时,为什么输出端增加串联电阻,可以提升稳定性?2023-10-30 1146
-
DC/DC转换器中输入滤波器稳定性问题的简单解决方案2024-10-14 63
全部0条评论

快来发表一下你的评论吧 !
