

Arduino开发板的旋转编码器如何使用
电子说
描述
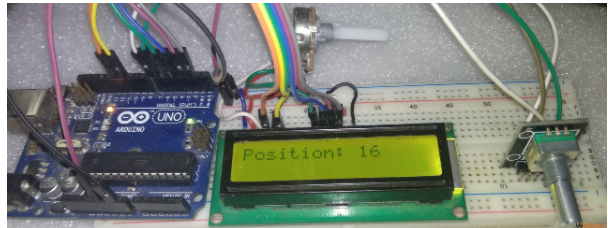
在本篇文章中,我们将学习如何在Arduino开发板上使用旋转编码器。我们将以带符号的数字同时显示顺时针和逆时针方向的编码值。
所需的组件
● Arduino UNO开发板
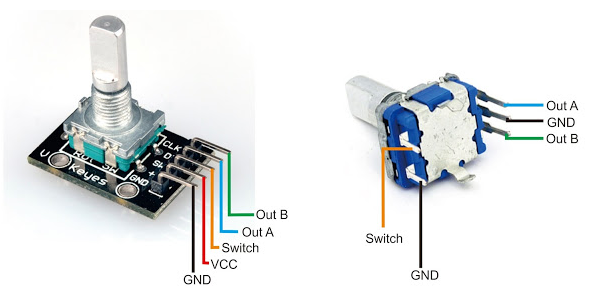
● 旋转编码器
● 1602 LCD显示屏
● 连接电线
● 面包板
旋转编码器
旋转编码器(Rotary Encoder),也称为轴编码器,是一种机电设备,可将轴或轴的角位置或运动转换为模拟或数字输出信号。旋转编码器有两种主要类型:绝对式和增量式。绝对值编码器的输出指示当前轴位置,从而使其成为角度传感器。增量编码器的输出提供有关轴运动的信息,通常将其所在位置处理为位置、速度和距离等信息。
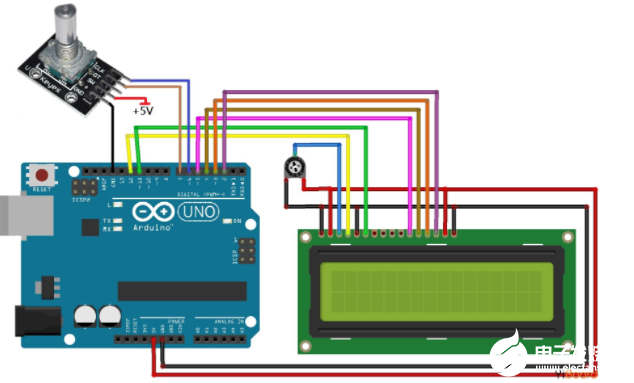
连接威廉希尔官方网站 图
下面的威廉希尔官方网站 图简单演示了如何在Arduino上使用旋转编码器。在面包板或PCB上组装威廉希尔官方网站 。
旋转编码器如何工作?
编码器具有一个磁盘,该磁盘具有均匀分布的接触区,这些接触区连接到公共引脚C和两个其他单独的接触引脚A和B,如下所示。
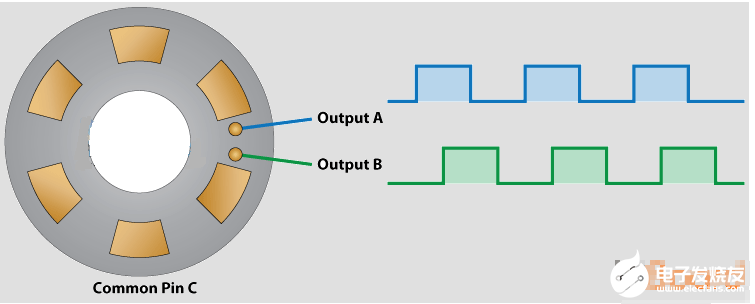
当磁盘逐步开始旋转时,引脚A和B将开始与公共引脚接触,因此将产生两个方波输出信号。
如果仅对信号的脉冲进行计数,则可以使用两个输出中的任何一个来确定旋转位置。但是,如果我们也要确定旋转方向,则需要同时考虑两个信号。
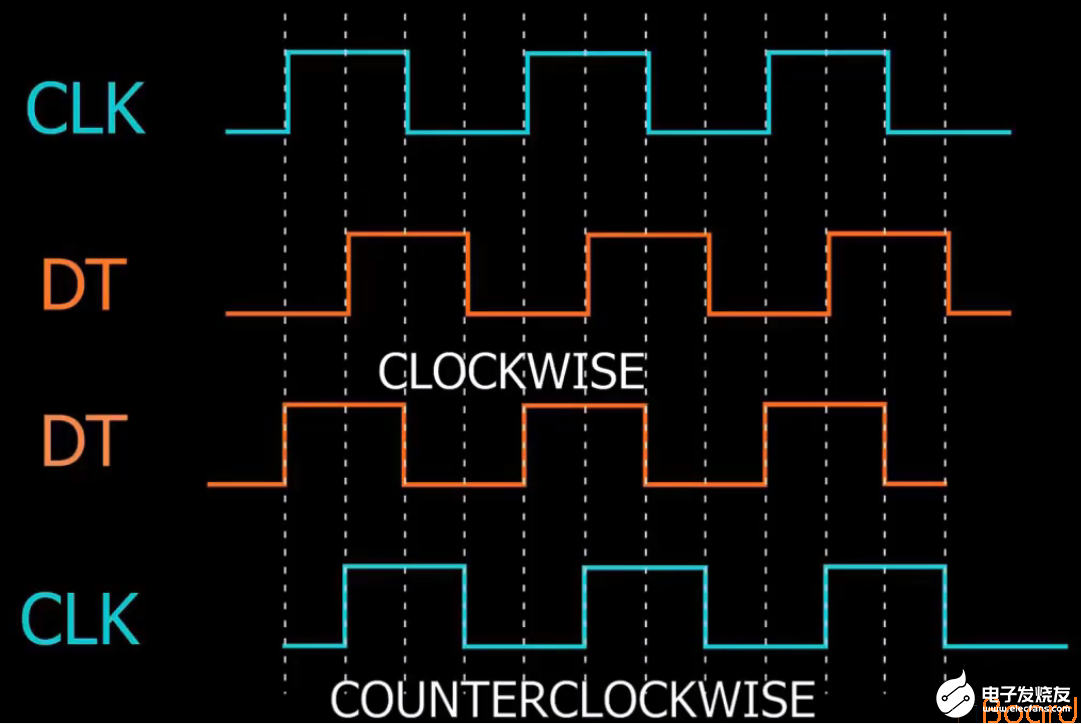
我们可以注意到,两个输出信号彼此之间相差90度。如果编码器顺时针旋转,则输出A将在输出B之前。
因此,如果我们每次计算信号从高到低或从低到高变化的步数,我们就会注意到两个输出信号的值相反。反之亦然,如果编码器逆时针旋转,则输出信号具有相等的值。因此,考虑到这一点,我们可以轻松地对控制器进行编程以读取编码器的位置和旋转方向。
源代码/程序
#include 《LiquidCrystal.h》
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
#define outputA 6
#define outputB 7
int counter = 0;
int aState;
int aLastState;
void setup() {
pinMode (outputA,INPUT);
pinMode (outputB,INPUT);
Serial.begin (9600);
lcd.begin(16,2);
// Reads the initial state of the outputA
aLastState = digitalRead(outputA);
}
void loop() {
aState = digitalRead(outputA); // Reads the “current” state of the outputA
// If the previous and the current state of the outputA are different, that means a Pulse has occured
if (aState != aLastState){
// If the outputB state is different to the outputA state, that means the encoder is rotating clockwise
if (digitalRead(outputB) != aState) {
counter ++;
lcd.clear();
} else {
counter --;
lcd.clear();
}
Serial.print(“Position: ”);
Serial.println(counter);
lcd.setCursor(0, 0);
lcd.print(“Position: ”);
lcd.setCursor(10, 0);
lcd.print(counter);
}
aLastState = aState; // Updates the previous state of the outputA with the current state
}
编辑:hfy
-
 dxaws123456
2022-08-16
0 回复 举报我试了一下,这程序没显示,屏是空白的,不知道是什问题 收起回复
dxaws123456
2022-08-16
0 回复 举报我试了一下,这程序没显示,屏是空白的,不知道是什问题 收起回复
-
dxaws123456
2022-08-16
0 回复 举报我试了一下,这程序没显示,不知道是什问题 收起回复
-
基于Arduino_STM32和STM32F103C8T6开发板(黑色板)对旋转编码器的使用2021-08-09 0
-
STM32 Arduino是如何读取编码器和旋转位置方向的2021-11-15 0
-
旋转编码器威廉希尔官方网站2009-02-09 3605
-
旋转式编码器,旋转式编码器是什么意思2010-03-03 2377
-
旋转编码器测量_旋转编码器安装方式2019-08-06 3939
-
旋转编码器拆卸方法_旋转编码器型号说明2019-08-06 17700
-
旋转编码器能直接换吗_旋转编码器更换注意事项2019-08-06 9780
-
Arduino旋转编码器的教程2019-10-31 10029
-
微雪电子旋转编码器简介2020-01-06 1061
-
旋转编码器如何工作?有哪些类型?2022-11-10 5763
-
旋转编码器的工作原理,旋转编码器的作用功能及应用2024-02-11 5691
-
如何将增量旋转编码器与Arduino连接2024-02-11 1429
-
带Arduino的旋转编码器设计 旋转编码器的工作原理和特点2024-07-04 2544
-
基于合宙Air780E开发板集成ec11旋转编码器实例2024-08-08 731
全部0条评论

快来发表一下你的评论吧 !
