

SBUS协议及编解码说明
描述
关于遥控器与无人机的通信协议也有很多种,常见的数据协议如下:1.pwm:需要在接收机上接上全部pwm输出通道,每一个通道就要接一组线,解析程序需要根据每一个通道的pwm高电平时长计算通道数值。 2.ppm:按固定周期发送所有通道pwm脉宽的数据格式,一组接线,一个周期内发送所有通道的pwm值,解析程序需要自行区分每一个通道的pwm时长。 3.sbus:每11个bit位表示一个通道数值的协议,串口通信,但是sbus的接收机通常是反向电平,连接到无人机时需要接电平反向器,大部分支持sbus的飞行控制板已经集成了反向器,直接将以旧换新机连接到飞行控制器即可。 4.xbus:常规通信协议,支持18个通道,数据包较大,串口通信有两种模式,可以在遥控器的配置选项中配置。接收机无需做特殊配置。
1
SBUS协议说明 SBUS本质是一种串口通信协议,采用100K的波特率,8位数据位,两位停止位,偶效验,即8E2的串口通信。 SBUS是一bai个接收机串行总线du输出,通过这根总线,可以获得遥控器上所有zhi通道的数据。目前很多模型及无人机电子设备都支持SBUS总线的接入。使用SBUS总线获取通道数据,效率高的,而且节省硬件资源,只需要一根线即可获取所有通道的数据。 SBUS总线使用的是TTL电平的反向电平,即标准TTL中的1取反为0,而0则取反为1,串口波特率为100000,数据位为8位,2个停止位,偶校验。 SBUS一帧数据的长度为25个字节,其中第"0"个字节为帧头:0x0f;第24个字节为帧尾:0x00;从第1个字节到第22个字节为1-16号比例通道的数据字节;第23字节中,第7位为数字开关通道17通道,第6位为数字开关通道18通道。 第5位为帧状态标志为(判断是否丢帧),用于控制接收机上的LED的状态,第4位为失控保护激活标志位,此位为1时,表示接收机进入失控保护状态。 值得注意的有三点:1.SBUS采用负逻辑,所以无论接收还是发送都要进行硬件取反(注意,一定要硬件取反),威廉希尔官方网站 如下
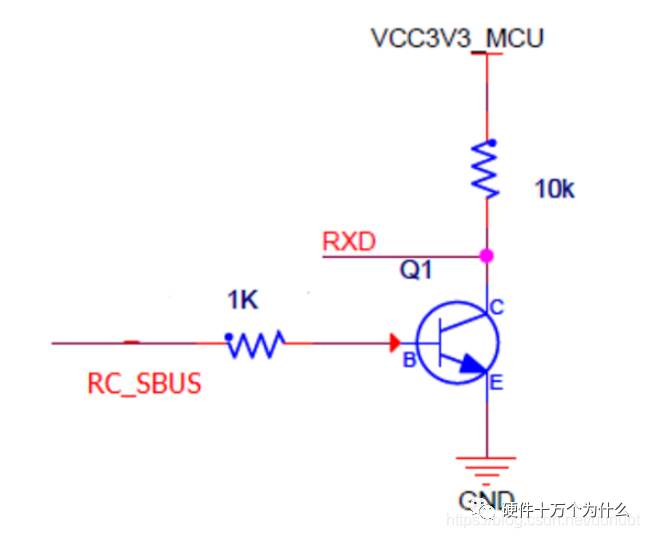
这是我在网上看资料时看到的威廉希尔官方网站 ,实际上我用的是7404威廉希尔官方网站 2.SBUS有两种模式,a.高速模式:每4ms发送一次 b.低速模式:每14ms发送一次 就是说每间隔4或者14ms这个串口就发送25个字节的数据,这25个字节的数据最多可以包含16个信息3.100K的波特率不是标准波特率,一般串口工具都不能直接读取(所以不要直接用电脑调试,除非你的电脑写好了非标准串口),可以用单片机读取。
strongerHuang
2
具体协议的格式
[数据头] [第一个字节] [第二个字节] ......[第二十二的字节] [标志位] [数据尾] 数据头、标志位、数据尾 不携带信息,而且数据头和数据尾是固定的,数据头=0x0f; 数据尾=0x00; 数据头(1字节)+数据(22字节)+标志位(1字节)+数据尾(1字节)
strongerHuang
3
编码解码
1.编码原理一个信息是二进制的11bit,比如1111 1111 111就可以表示一个信息,一共16个这样的信息,按照顺序将这16个信息依次排成一串,得到一个176bit(11 *16)的数据,也就是22字节(176 / 8 = 22)的数据,再加上数据头数据尾校验位就组成了一个要通过串口传送的信息。每隔4或者14ms就传送一个这样的信息。 所以这16个信息每一个所能表示的最大值是2^11 = 2048,也就是他的精度。2.标志位标志位的高四位有特殊含义,第四位并没有使用,依照我的理解,第七位和第六位表示两个数字通道(通道17和18)信息(就是只有高低电平的通道,一般用来控制通断或者某个电机简单的启动或者停止,比如1表示启动电机0表示停止电机),第五位表示帧丢失,接收机红色LED亮起,我的理解是,如果这一位为1,表示这一帧信号出问题了,接收机红色LED亮起。第四位表示故障保护激活,意思应该是说如果这一位为1,激活接受方故障保护。 bit7 = ch17 = digital channel (0x80)
bit6 = ch18 = digital channel (0x40)
bit5 = Frame lost, equivalent red LED on receiver (0x20)
bit4 = failsafe activated (0x10)
bit3 = n/a
bit2 = n/a
bit1 = n/a
bit0 = n/a
责任编辑:xj
原文标题:SBUS协议及编解码
文章出处:【微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
-
为什么需要视频编码,它的原理又是什么?第二集#视频编解码 #视频编解码面包车 2022-07-29
-
PT2262/PT2272编解码集成威廉希尔官方网站 原理说明2012-08-20 0
-
有哪位能用FPGA实现G.729语音编解码的协议?2013-06-03 0
-
Hi3521DV200 H.265编解码2021-07-22 0
-
如何去实现SBUS信号的编码与解码呢2021-12-20 0
-
Android硬编解码如何去实现呢2022-04-11 0
-
接口协议智能编解码方法研究2010-02-21 560
-
音频记录PCM编解码系统2010-08-31 640
-
频域相位编解码OCDMA系统2009-02-28 1133
-
RS编解码的FPGA实现-说明2016-05-04 683
-
VS200视频编解码器使用说明书v2.02016-12-27 1031
-
MMoIP-Hi3531编解码器生产检验说明书2016-12-27 862
-
通信接口——编解码2017-09-04 862
-
走向实用的AI编解码阐述2023-06-15 968
-
编解码一体机相对于传统的编解码设备有哪些优势?2024-01-31 1450
全部0条评论

快来发表一下你的评论吧 !
