

图解支持向量机SVM
描述
作者说:我以前一直没有真正理解支持向量机,直到我画了一张图。
1. 问题
支持向量机(SVM)旨在解决「分类」问题。数据通常包含一定数量的条目/行/点。现在,我们想对每个数据点进行分类。为简单起见,我们假设两个类别:「正类」和「负类」。这或许可以帮助解答以下问题:
基于图像的像素数据,判断这张图像中是否有猫(有猫则标签为正类);
基于邮件的主题、发送者、文本等,判断该邮件是否为垃圾邮件;
判断某个病人是否患有某种疾病。
其精髓在于,当我们知道正确答案时,我们会想到一些将数据分为两类的规则(对于支持向量机而言,「规则」是画一个平面,一侧的所有点均为「正」,另一侧的所有点均为「负」)。当我们遇到不知道类别的新数据点时,我们使用规则对其进行分类。分类问题严重依赖约束优化,同时也是约束优化的一个直观示例。大家可以参考以下博客或吴恩达的文章。
博客地址:https://towardsdatascience.com/lagrange-multipliers-with-pictures-and-code-ace8018dac5e
吴恩达文章地址:http://cs229.stanford.edu/notes/cs229-notes3.pdf
1.1 图解
我以前一直没有真正理解支持向量机,直到我画了一张图。
我们可以看到特征空间中有一些点。为方便可视化,我们使用一个可在屏幕上观看的 2D 特征空间。该空间中散落着一些数据点,每个点具备二元标签((1/-1)。如下图所示,我们将绿色点看作正类,红色点看作负类,黄色点类别未知。如果让你猜测黄色点的标签,你会怎么选?你可能会发现其中一些点并不是那么容易确认类别。
图 1:2-D 分类问题。绿色点是正类,红色点是负类。你可以猜出黄色点的标签吗?(绘图工具:https://github.com/ryu577/pyray)
现在,如果我画一条紫色线将两个类别分割开,那么黄色点属于哪个类别就清晰多了(紫色线上方是绿色点,下方是红色点)。
图 2:画一条线,作为将正类标签和负类标签分割开来的「规则」。现在,我们可以使用该规则标注每个黄色点的类别。
然而,这条线并非唯一。有很多条紫色线可以将绿色点和红色点完美分割(见下图)。随着下图中紫色线的移动,某些黄色点就显得很微妙了(它们处于紫色线的不同侧,因此它们的类别取决于你选择使用哪条紫色线)。
图 3:将红色点和绿色点完美分割的线有很多条。那么我们应该选择哪一条呢?
问题在于,所有候选线中,哪一条是「最优」的?有一点很清楚:当上图中的紫色线接近右下角的红色点(critical point)时,其泛化效果不好,而当它远离那个点时,其分割效果要好得多。因此,这个红色点可以说明紫色线的分类效果,因此它是「关键点」。我们可以说,远离该红色点的线同样远离所有训练样本,而靠近该红色点的线最终的分类效果并不好。因此,离最近的训练样本较远的线才是优秀的分类器。
接下来,我们来看如何利用数学知识绘制分割线。
2. 绘制分割线
现在我们要(在 2D 空间中)画一条分割线(在更高维度的空间中,则为分割面)。那么这条线是什么呢?它是具备某种共性的点的无限集合。这些点满足一个特定公式。为了找到这个公式,我们先从最简单的线 x 轴开始。x 轴上所有点的位置向量存在什么共性?v_x = [x,0],即它们对应的 y 坐标均为 0。
也就是说,x 轴上每个点的位置向量与指向 y 轴方向的向量是正交(垂直)的。
这个说法可能看起来比较晦涩难懂,但是我们必须这么说,因为这种现象其实对所有线都成立,而并非只适用于 x 轴。我们希望将此说法泛化至任意线。现在每次挪动一小步,我们来看看穿过原点的线(如 x 轴)。如下图所示,只需将 x 轴旋转一定角度,就可以得到这些线。
图 4:旋转 x 轴可以得到穿过原点的任意线。这些线上的每个点都与橙色向量相垂直。
随着线的变化,与线相垂直的向量也在变化,但是所有线上每个点的位置向量都与某个向量垂直。我们把这个与线垂直的向量叫做 w。当我们改变 w 时,就可以捕捉到所有此类线。
注意,对于任意给定线而言,存在多个 w 值。如果我们将向量 w 扩展或缩小一定数值,该线上每个点的位置向量仍与向量 w 垂直。
图 5:扩大或缩小正交 w 向量。
为什么不把 w 向量限制在大小为 1 呢?下文中,我们将 w 向量的大小设为 1。
现在我们已经将穿过原点的所有线都参数化了。那么那些没有穿过原点的线呢?我们将穿过原点的线移动一定量,即在该线法向量 w 的方向上移动 b。现在,w 与该线上每个点的位置向量的点积不为零,而是常量 b(参见下图)。w 向量是从原点指向紫色线的单位向量,且与紫色线垂直。A 即紫色线上与原点最接近的点。假设 OA 的距离是 -b。现在,考虑两个随机点 B 和 C(分别是图中绿色点和橙色点)。将 OB 或 OC 与单位向量 w 相乘,分别得到三角形 OAB 和 OAC 的底。 在这两种情况中,OA 为 -b。由于这两个点只是紫色线上的任意点,我们可以推断出,紫色线上的所有点均满足 w^T x+b=0(其中 x 表示紫色线上点的位置向量)。
图 6:未穿过原点的线。
如果我们将不在该线上的点应用于上述公式呢?得到的结果不是零,而是从该点到紫色线的垂直距离(对于紫色线上的点而言也是如此,所以它们所对应的公式结果为零)。我们需要注意:这个结论仅适用于 |w|=1 的情况。下图清晰说明了这一结果。B 为不属于紫色线的任意点,B』』 为从 B 到紫色线的垂点,B』 为从 B 到 w 向量的垂点。从 B 到紫色线的垂直距离为 BB』』。但是由于 A-B』-B-B』』 是一个矩形,因此该垂直距离等于 AB』=OB』-OA。现在,OB』 是 B 的位置向量与 w 的点积。因此,如果 x 是 B 的位置向量,则 |OB』| = w^T x。这意味着 |AB』|=w^T x-(-b)(OA=-b)。因此从点 B 到紫色线的距离是:|AB』|=w^T x+b(该公式恰好是紫色线的公式)。
图 7:将不在紫色线上的点应用于紫色线公式会发生什么?我们得到该点与紫色线之间的垂直距离。
注意,在 w 指向方向一侧的所有点(如图 7 中的点 B)到紫色线的垂直距离为正值,而另一侧点的垂直距离为负值。
在 w 指向方向一侧的所有点均得到正类标签 (t_i=1),而另一侧的所有点均得到负类标签 (t_i=-1)。因此,如果我们将这些标签与垂直距离相乘,则所有点调整后的垂直距离均为正,前提是这些点均被紫色线正确分类(即具备正类标签的点在线一侧,具备负类标签的点在另一侧)。
3. 最佳分割线
现在到了 SVM 的重点了。我们将任意点到分割线的调整后垂直距离叫做「间距」(margin)。那么,对于任意给定分割线,所有点均具备间距(如果点被分割线正确分类,则间距为正,反之则间距为负)。我们想获取将正类和负类完美分割的线。也就是说,间距越大越好,即使是对于邻近界限(分割平面)的点。
那么,最大化所有间距(甚至是最接近分割线的点的间距)的分割平面应该能够很好地分割这些点。现在,给出 (w,b),第 i 个点的间距为:
间距公式。
其中 x_i 表示特征空间中的位置向量,t_i 表示标签:1 为正类,-1 为负类。
所有点中的最小间距为:

公式 1:所有点中的最小间距。
我们想让 (w,b) 最大化上述最小间距。也就是:
即我们想让 (w,b) 满足 |w|=1,且最大化间距:

公式 2:SVM 目标函数。
注意:如果这条线没有分离数据,那么对于 (w,b),某些点的间距
间距公式。
为负。且这些点中的其中一个会在第一次最小化中「脱颖而出」,这意味着 (w,b) 无法在第二次 arg max 时胜出。因此,该公式保证了胜出的 (w,b) 能够分割数据。
公式 2 是一个优化问题,涉及最小化和最大化(mini-max)。解决一级优化总比二级优化要简单。因此,我们尝试将公式 2 转化为约束优化问题。
我们用 γ 表示所有点的最小间距。
公式 3:约束。
最终得到的优化问题为:

公式 4:SVM 优化问题。
上述优化问题具备二次/线性约束和线性目标函数。我们可以使用二次规划求解器(quadratic programming solver)和最优分割线/平面 (w,b) 解决该问题。
现在,我们来试着进一步简化该问题。我们发现可以去除 γ。其代价是,我们必须放弃 w^T w = 1 这一要求。但这是值得的。我们使用 γ 将约束分割为两部分,得到:
公式 5:使用 γ 分割分割平面公式。
现在,使
引入新的 w 变量。
为两侧取绝对值:
取绝对值。
我们之前要求 |w|=1。这意味着:
因此,公式 3 变成了:
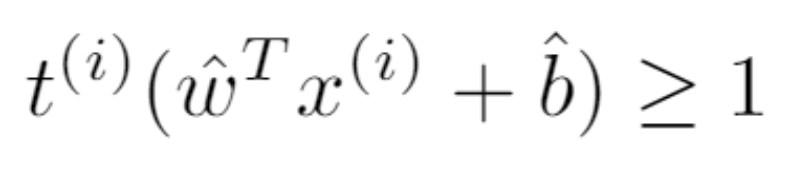
公式 5 和公式 6 使公式 4 中的优化问题变成了:

现在,优化问题有了一个丑陋的目标函数。但是最大化 1/|w| 等同于最小化 |w|,等同于最小化 |w|²。添加 1/2 使得计算更加简单。
因此,上述优化问题变为:

公式 7
现在,该优化问题具备二次目标函数和线性约束(线性约束二次规划,LCQP)。使用二次规划求解器即可解决该问题。
现在,我们知道如何通过解决优化问题找出最优分割线了。透过表面查看解决这类优化问题的真正机制,会帮助我们对该问题了解更多,具备更强大的洞察和见解。
责任编辑:xj
原文标题:透过现象看本质,图解支持向量机 SVM
文章出处:【微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
-
机器学习分类算法之支持向量机SVM2019-04-29 0
-
支持向量机(SVM)之Mercer定理与损失函数全面介绍2019-07-23 0
-
支持向量机是什么2019-09-03 0
-
支持向量机的SVM2020-05-20 0
-
怎么理解支持向量机SVM2020-06-14 0
-
基于支持向量机(SVM)的工业过程辨识2012-03-30 783
-
支持向量机之SVM引导_《OpenCV3编程入门》书本配套源代码2016-06-06 626
-
支持向量机之SVM引导_OpenCV3编程入门-源码例程2016-09-18 599
-
基于支持向量机SVM引入雷达故障预诊断2017-12-20 727
-
关于支持向量机(SVMs)2018-04-02 4193
-
人工智能之机器学习Analogizer算法-支持向量机(SVM)2018-05-29 2041
-
OpenCV机器学习SVM支持向量机的分类程序免费下载2019-10-09 1043
-
什么是支持向量机 什么是支持向量2020-01-28 21936
-
支持向量机SVM的图解分析与研究2022-10-10 1196
-
支持向量机(兵王问题描述)2023-06-09 1356
全部0条评论

快来发表一下你的评论吧 !
