

VASS标准里的AAutoVR自动释放设备
描述
通过AutoVR自动释放设备
(VASS6里的设置)
一个部分始终包含连续的夹紧过程,而不会因机器人的动作而中断。
在一个区域内,AutoVR必须确保在手动模式下打开一个夹具后,将它向R方向移动到足以使一个可以通过音序器根据顺序再次夹紧的程度。
当打开上一部分的夹具时,这是不容易实现的,因为由于准备就绪消息,无法到达步骤链中的起点。
为了确保关闭在手动模式下打开的上一节的夹具,夹具必须再次关闭,并带有节完成消息并且AutoVR = 1。但是,由于必须同时存在释放V,因此必须在阀模块上编写用于步进释放的并行路径。
必须始终对AutoVR进行编程,使其不受电动运动(例如鼓位置)的影响。
功能:
AutoVR的作用在于,在以下两种情况下为顺序控制提供有效的转换条件:一是在手动操作模式下设备状态发生手动更改时;二是切换到自动操作模式后无有效转换条件时。
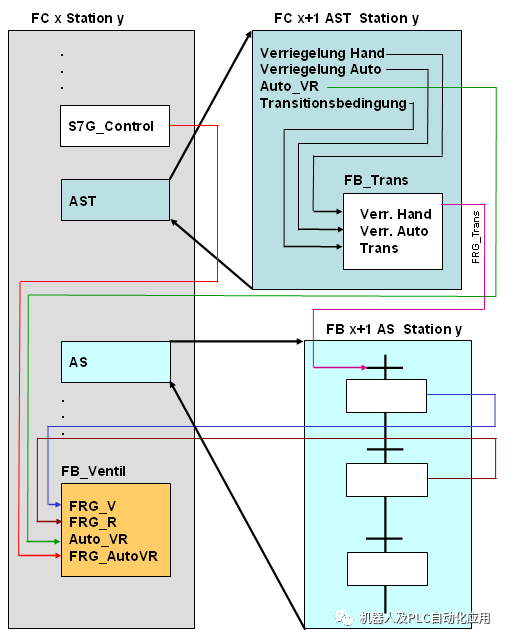
功能块FB_Ventil(例如FB410)上的自动开启(R)功能通过功能块FB S7G_Control(FB 642)上的输出端“FRGAutoVR”激活,并通过程序中AutoVR位内存实现。此时,气缸会尝试进行同步,在此过程中,气缸会一直保持收回状态,直到找到一个符合的转换条件,之后顺控器可在自动模式下继续运行。
此外,该功能还可实现在取消选择POT的情况下将设备再次控制到收回状态,即在取消选择POT的情况下,FRGAutoVR也同样会激活,气缸将通过AutoVR-位内存的状态再次调控到R的状态。
AutoVR功能只用于夹紧技术,即适用于所有的阀。但电极式气缸不采用AutoVR进行控制。这种情况下,须在功能块FB Ventil (例如FB410)上设定配置位( Configurationsbit ) Cfg.X5 1) 或 X6 1) ; // 1= 不受控制“NOT AutoVR“。
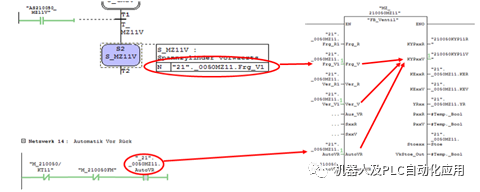
若 FRGAutoVR=1 且 AutoVR =1 且 Ver_V=1 且 Frg_V=1 则 夹头运动至V位
若 FRGAutoVR=1 且 AutoVR =0 且 Ver_R=1 则 夹头运动至R位
AutoVR功能仅用于夹紧技术,即 所有使用的阀门. 这不适用于电极圆柱体,这些电极圆柱体未连接到AutoVR。在这种情况下,配置位为Cfg.X5或X6;// 1 =在没有控制的情况下参数化“ NOT AutoVR”。
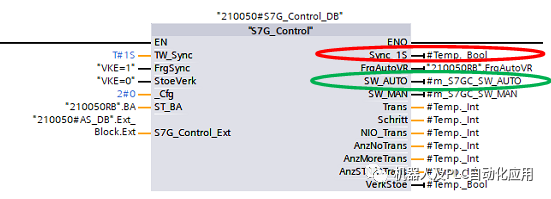
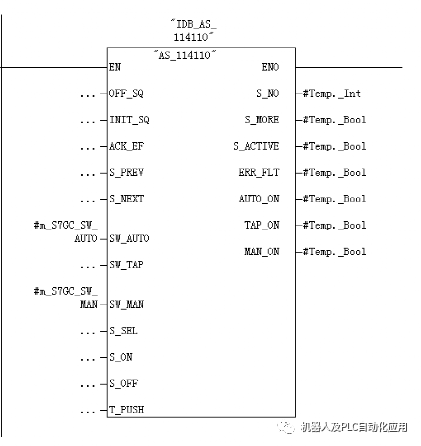
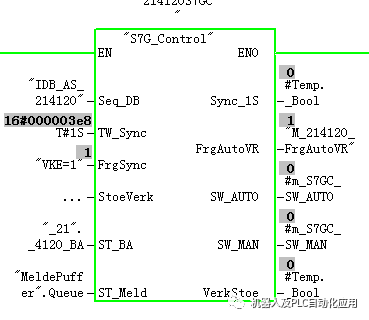
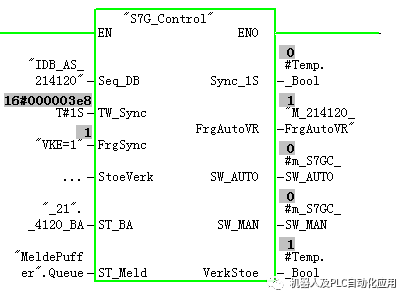
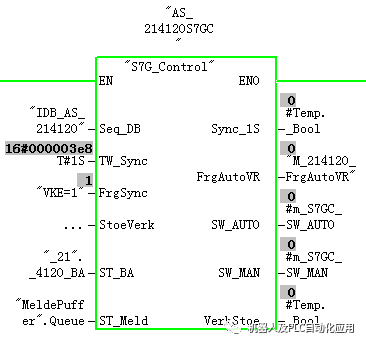
VASS中用来控制顺序块的主要功能FB642
FB 642 S7G_Control
该函数块 (FB) 用于:
在手动模式中对顺序进行自动跟踪。
这用于对控制程序进行同步。
在步 x (Sx) 针对性地停机。
仅当自动模式 = “ 已激活”(active) 且 Sx = “ 非排除步”(No exclusion step) 时。
如果到达了停机步, S7-GRAPH 顺序将停止执行 (MOP.HALT)。
该块通常采用专用背景数据块进行访问。
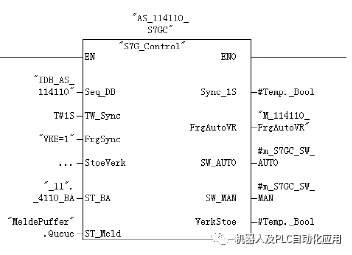
输入
Seq_DB Block_DB: 被控制顺序的背景数据块
TW_Sync : TIME 时间值,用于检测同步结果
Frg_Sync : 同步使能
StoeVerk : 故障系列输入
输入/输出
ST_BA : 运行模式结构
输出
Sync_IS :同步结果 = 1 步,用于未决最小测试时间 "TW-Sync"
FrgAutoVR : 未找到有效步,接下来启动 AutoVR
SW_AUTO: 启动顺序自动模式
SW_MAN: 启动顺序手动模式
VerkStoe: 故障组消息 = "StoeVerk" OR 特定故障
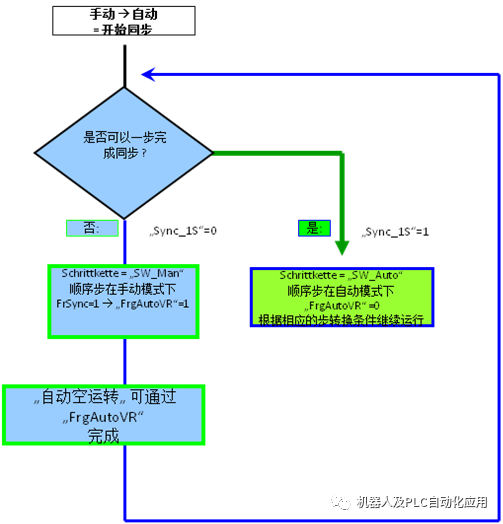
1.当没有T条件满足时,工作模式有自动变成手动时
SW_AUTO := (ST_BA.K9_BaAuto AND Sync_1S) OR ST_BA.K23_BaHand;
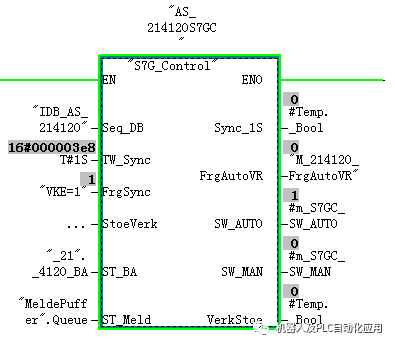
2. 工作模式由手动变成自动时 ,顺序块先是手动状态,检测到只有一个T条件满足时等待Sync_1S时间后变成自动并跳条件满足的步,当没有T条件满足时如下:
此时激活了FRAUTOVR
R_TRIG_BaAuto (CLK:=ST_BA.K9_BaAuto AND Not F_TRIG_PoT.Q);
SW_MAN := R_TRIG_BaAuto.Q AND NOT Sync_1S; -自动关了就是手动
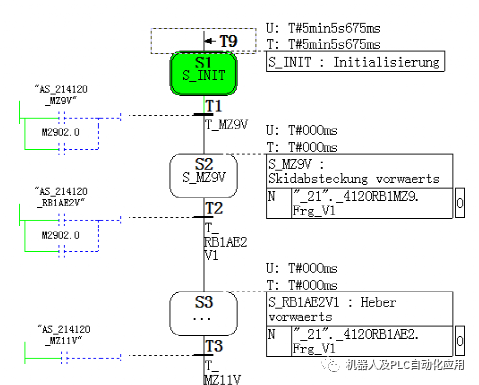
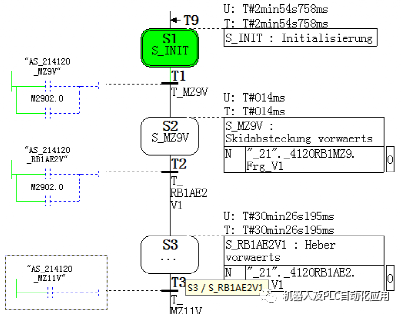
3.顺序块在自动模式时按条件的满足只能向下运行,不能逆步向上跳转。
当顺序块没有使用FB642 7G_Control 控制时,顺序块不能自动跳步 ,不能逆步 。
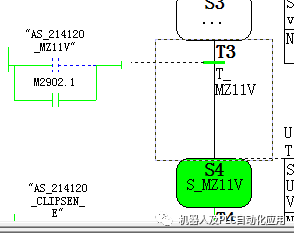
这时 当T3条件满足时顺序块等待1S后会由手动变为自动同时跳转到该步。
在K40 没有启动时 就会把FrgAutoVR 关闭
ELSIF NOT FrgSync OR NOT SK_Auto OR NOT ST_BA.K40 OR Sync_1S OR Seq_DB.DX[pMOP, 0]=TRUE THEN
FrgAutoVR := FALSE;
END_IF;
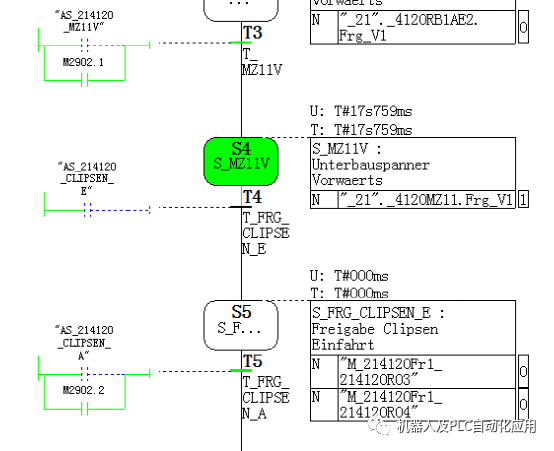
4.有多个条件T满足时,工作的模式由手动变成自动时 ,这时顺序块的工作模式是手动, FrgAutoVR有输出

5.只有1个条件T满足时,工作的模式由手动变成自动时 ,这时顺序块的工作模式在TW_SYNC的时间后由手动变成自动。并跳到条件满足步,关闭FrgAutoVR
Sync_1S会在瞬间发出1个脉冲

责任编辑:lq
-
请问DM368 的EDMA channels如何释放?2018-07-25 0
-
标准字符设备注册函数2020-03-11 0
-
labview无法释放安捷伦设备2021-11-03 0
-
怎样去重定义标准库函数里调用的与输出设备相关的函数呢2021-11-25 0
-
如何对标准库函数里调用的与输出设备相关的函数进行重定义呢2021-11-30 0
-
博途VASS06的CPU设置要求2020-12-23 4243
-
VASS标准中急停得接法与控制方法2020-12-23 4615
-
探究VASS的PLC顺序控制程序到底该如何使用2021-03-10 2157
-
西门子自动化标准有以下这些通用功能 你知道哪个?2021-03-17 7061
-
S7安全门的控制与接线-VASS的控制2021-03-18 5069
-
探究VASS标准USER里的扭矩操作详细解析2021-04-26 2188
-
关于博途VASS6的Profinet诊断2021-06-09 3036
-
VASS 标准中的预期功能范围2022-07-15 2258
-
大众VASS06报警信息提示功能2023-01-05 1214
-
大众VASS V6标准中文手册及PLC程序模板下载2023-04-27 8091
全部0条评论

快来发表一下你的评论吧 !
