
资料下载


×
基于背景差分的机场跑道异物分块检测与跟踪算法
消耗积分:0 |
格式:pdf |
大小:5.58 MB |
2021-04-21
分享资料个
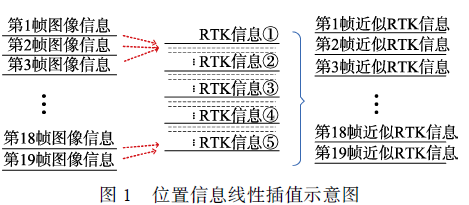
针对机场跑道异物的无人自主检测与识别过程中存在的检测结果受环境影响大、小目标检测困难以及漏检率高等冋題,提岀基于背景差分的机场跑道异物分块检测与跟踪算法。首先利用速度辅助的位置信息线性插值,获取背景模板图像库与待检测图像序列最相关帧;然后将图像分为不同子块,利用各子块内图像纹理复杂度设置自适应权值,结合ORB算法进行特征点提取,将各子块特征点归一化至原始图像,并与背景模板库最相关帧对齐作差获取异物检测结果;最后引入核相关滤波器对检测结果进行多目标跟踪,釆用各子块局部跟踪算法降低运算时间并对跟踪结果进行可靠性检验。在3种实验场景下,与5种主流检测算法的对比实验结果表明,与目前已有的基于图像的杋场异物检测算法相比,在保证算法处理速度的基础上,该算法将异物整体错检率降低了70%以上,并在异物尺寸大于1cmx1cm的情况下,将整体漏检率降低至0,获得了较好的效果。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



