

基于Arduino UNO和HC-05蓝牙模块控制伺服电机
描述
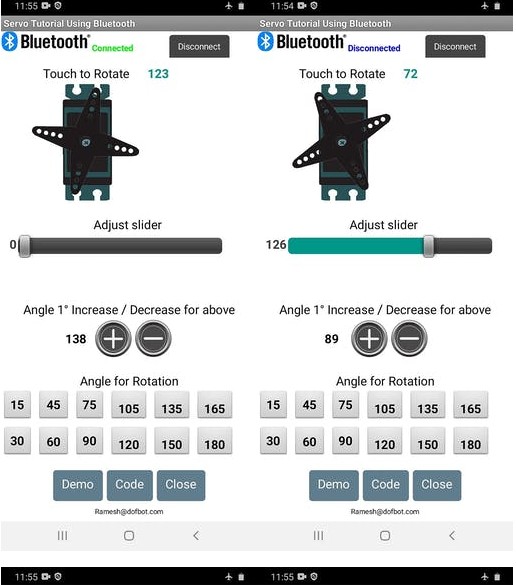
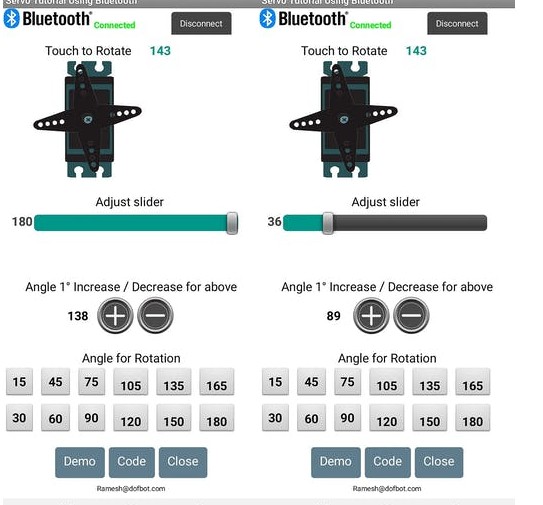
了解如何在移动设备,Arduino UNO和HC-05蓝牙模块中使用Android应用程序控制伺服电机。
硬件部件:
Arduino UNO × 1个
HC-05蓝牙模块 × 1个
SG90微型伺服电机 × 1个
软件应用程序和在线服务:
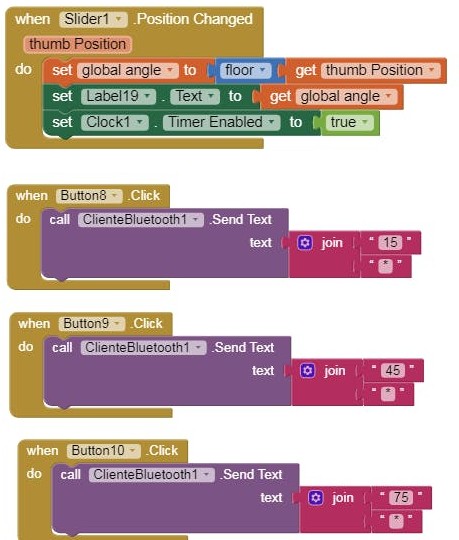
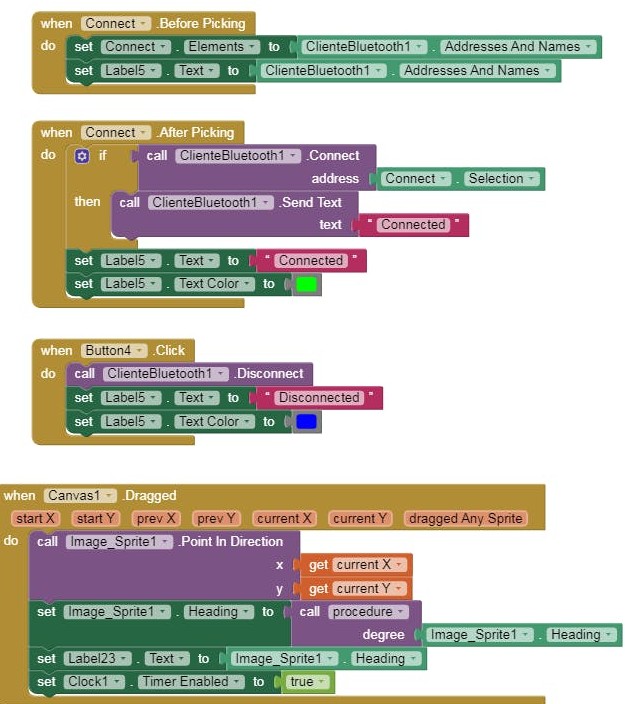
MIT App Inventor 2
手动工具和制造机:
10个 跳线套件,5厘米长
面包板,170针
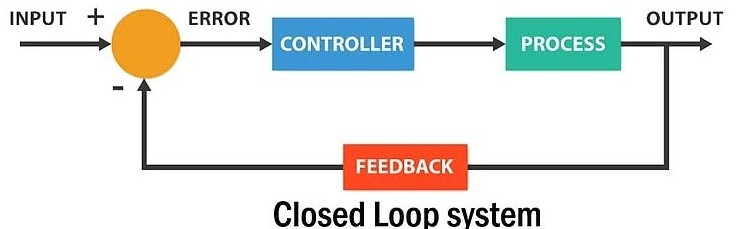
伺服电机是一种闭环系统,它使用位置反馈来控制其运动和最终位置。
RC伺服电机在相同的原理上工作。它包含一个小型直流电动机,通过齿轮连接到输出轴。
输出轴驱动伺服臂,并且还连接到电位器(电位计)。
电位计向伺服控制单元提供位置反馈,在此将电机的当前位置与目标位置进行比较。
根据错误,控制单元会校正电动机的实际位置,使其与目标位置相匹配。
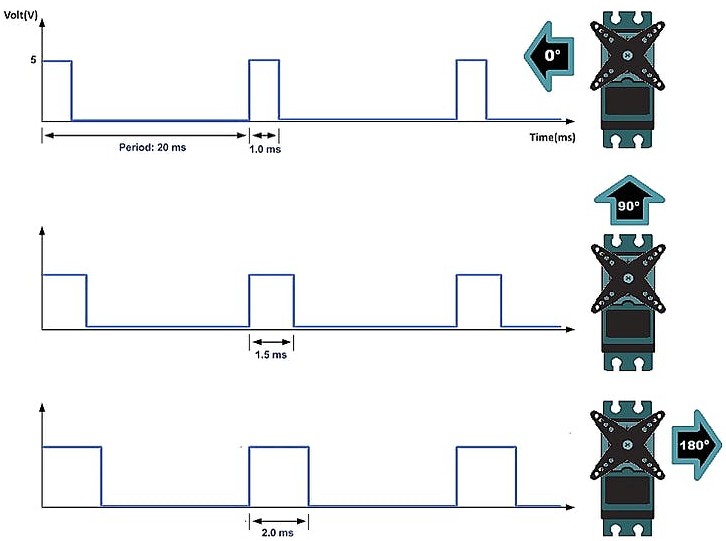
通过通过信号线发送一系列脉冲来控制伺服电机。控制信号的频率应为50Hz或每20ms产生一个脉冲。脉冲的宽度决定了伺服器的角度位置,这些类型的伺服器通常可以旋转180度
控制线用于传达角度。该角度由施加到控制线的脉冲的持续时间确定。这称为脉冲编码调制。伺服器希望每20毫秒(.02秒)看到一个脉冲。脉冲的长度将决定电机旋转多远。例如,一个1.5毫秒的脉冲将使电动机转到90度位置(通常称为空挡位置)。如果脉冲短于1.5毫秒,则电动机会将轴旋转到接近0度的位置。如果脉冲长于1.5毫秒,则轴将更接近180度。
威廉希尔官方网站 原理图:
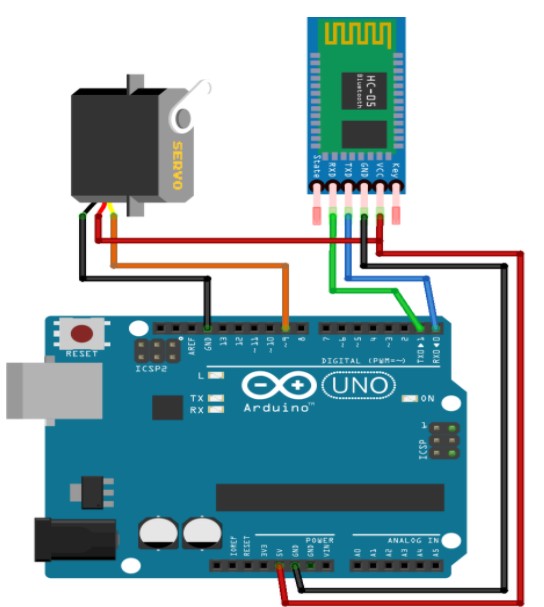
首先,使用Arduino连接伺服电机。
将两个伺服电机的黑线连接到Arduino的GND将两个电机的橙色线连接到Arduino的5V将第一个电机的橙色线连接到Arduino的引脚9
首先,在没有蓝牙的情况下使用以下arduino代码测试Servo电机扫描功能:
#include 《Servo.h》
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos 《= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable ‘pos’
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos 》= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable ‘pos’
delay(15); // waits 15ms for the servo to reach the position
}
}
输出结果:
之后,与Arduino建立蓝牙模块的连接。
将蓝牙模块的VCC连接至Arduino的5V将蓝牙模块的GND连接至Arduino的GND将蓝牙模块的TX连接至Arduino的Rx引脚将蓝牙模块的RX连接至Arduino的Tx引脚
用于蓝牙控制的Arduino代码:
#include 《Servo.h》
Servo myservo;
const int Pin = 9; // myservo pin3 PWM
char Text;
String Spilt;
String angle;
int pos = 0; // variable to store the servo position
int k1;
void setup() {
Serial.begin(9600);
pinMode (Pin, OUTPUT);
myservo.attach(Pin);
}
void loop() {
if(Serial.available())
{
Text = Serial.read();
Spilt = Spilt + Text;
if (Text == ‘*’) {
Serial.println(Spilt);
Spilt = Spilt.substring(0, Spilt.length() - 1); // Delete last char *
k1 = Spilt.indexOf(‘*’);
angle = Spilt.substring(0, k1);
myservo.write(angle.toInt());
delay(15);
Spilt = “”;
}
}
}上载程序后,重新连接TX和RX,并确保手机已与相应的Bluetooth模块配对。连接到Android手机的步骤如下:
打开蓝牙模块的电源,然后转到Android设备上的设置。
配对设备。在某些电话上,此步骤必须执行两次才能配对。确保准备好PIN码(大多数Bluetooth Mate的默认设置为“ 1234”)》开启两个设备的电源》在Android“设置”应用程序的Bluetooth图标下搜索模块。
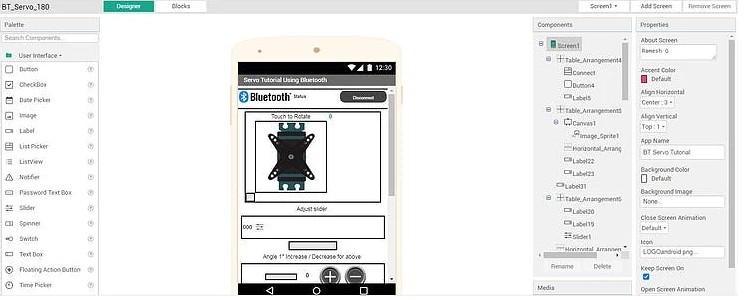
将设备与手机配对后,打开BT Servo应用程序。
使用列表连接到并找到包含文本HC-05的正确设备名称。
责任编辑:pj
-
如何使用Arduino开发板通过蓝牙方式控制伺服电机2021-06-28 0
-
开源资料HC-05蓝牙模块和Arduino入门参考方案2020-12-25 0
-
关于HC-05蓝牙模块的介绍2021-08-06 0
-
使用带有Arduino Uno的蓝牙HC-05模块来控制伺服电机2022-06-23 0
-
HC-05 蓝牙模块 原理图 PCB 及指令说明2016-05-20 13198
-
如何使用HC-05蓝牙模块进行单片机通讯2019-06-18 2153
-
怎样用Arduino连接电机2019-08-29 16591
-
stm32之蓝牙模块HC-05使用2021-11-18 2030
-
HC-05的使用-详细2021-11-24 809
-
HC-05模块使用2021-11-24 750
-
HC-05蓝牙模块原理图下载2021-12-02 2514
-
自制使用HC-05蓝牙模块与手机进行通信的蓝牙控制车2022-08-11 6735
-
使用Arduino UNO R3和蓝牙模块HC 05制作门锁2022-11-04 426
-
如何使用Arduino的蓝牙控制伺服电机2022-11-16 3553
-
基于HC-05蓝牙模块控制16x2 LCD显示屏2023-06-30 432
全部0条评论

快来发表一下你的评论吧 !
