

剖析水下拖曳体多源信息监控系统设计与实现
电子说
描述
摘要: 基于海洋电法探测系统中水下拖曳体对多源信息实时监控的需求,设计了一种准实时监测拖曳体的运动状态与环境信息的监控系统。该系统可与水面监控器保持命令与数据沟通,并在监控器的指令下启动水下电法仪执行参数设置、数据采集等操作。经系统样机的海上测试结果表明,系统性能稳定可靠,能够在其他水下信息采集作业中得到推广应用。
21世纪是海洋的世纪,海洋环境监测、工程建设、资源勘探等方面的开发和研究正蓬勃发展[1]。诸多海上作业均离不开水下探测,而水下拖曳体作为一种比较直接的探测工具载体,使用非常广泛[2]。水下拖曳体平台在工作时,需要实时采集自身的姿态信息、监听和处理各种外部通信信息等[3]。
因此,完善的拖曳体平台应当具有较强的多源信息监控与处理能力。本文基于国家863计划项目“海底热液多金属硫化物电阻率法探测关键技术”和国际合作项目“深海高密度电法探测系统研制”对水下拖曳体平台监控多源信息的需求设计了一套技术方案,并研制出了系统样机。
1 系统简介
1.1系统组成与工作原理
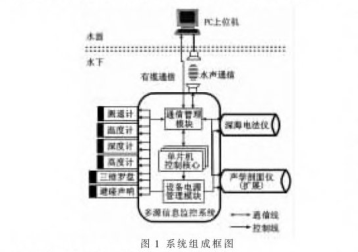
水下拖曳体是水下测量设备和多种传感器的载体[4],内部集成多源信息监控系统,是多种类型信息汇集与传递的中心。系统从传感器组实时采集拖曳体的状态参数和运动信息(拖曳体内外温度、剩余电量、姿态、深度与高程、距周边障碍物距离等),采集的数据通过通信电缆或水声通信器传输给水面监控PC上位机,实现对拖曳体姿态的准实时监控,同时系统接收PC上位机的通信命令,对拖曳体上搭载的电法测量仪器执行参数设置、启动测量等操作。
1.2 系统外部搭载设备
系统外部搭载的设备包括运动信息监测的传感器组、水声通信器及电法测量仪等,如图1所示。其中拖曳体内部温度传感器用于监测内部发热量较大的功率器件等位置的表面温度,外部温度传感器测量周边水体的温度;
深度传感器通过测量拖曳体所处位置的水压力,计算得到拖曳体距离海面的深度;高度传感器通过声波探测拖曳体距离水底的高度;避碰声呐安装在拖曳体侧面,用于测量拖曳体距周边障碍物的距离;
三维罗盘实时监测拖曳体的姿态,并与重力加速度计搭配测量拖曳体的行进方向、加速度等全方位姿态与运动信息;
水声通信器用于水下无线通信,使拖曳体平台与水面上位机保持信息与命令的传递[5];
电法测量仪[6]在信息监控系统的支配下执行工作参数修改、电法测量等任务。
2 系统硬件设计与实现
系统的硬件包括单片机控制核心、设备电源管理、通信等模块。单片机控制核心实现系统的正常运行、多源信息的数据采集与实时监控;设备电源管理模块为外部设备提供独立的电源,并在单片机驱动下控制各设备正常开启与关闭;通信管理模块负责协调单片机控制核心与各搭载的设备之间数据通信,并实时监听PC上位机发送的信息。
2.1 单片机控制核心
系统采用功能强大的MSP430单片机[7],它具备以下功能:(1)具有丰富的硬件资源,包括复位威廉希尔官方网站 、看门狗、定时器等;(2)具备多个驱动能力强的I/O口,对大量外部搭载设备进行上电操作; (3)支持有缆通信(RS-232/485)和无缆通信(水声通信),具有主动开启工作(预设时间和预设水深触发工作)、被动开启工作(在PC上位机指令下启动工作)等功能。
进入工作状态后,水面PC上位机能对其执行读取测量结果、修改工作参数和工作模式等操作;(4)具有一定的稳定性保障设计,可对各种故障与意外(通信故障、温度过高、程序跑飞、电压过低等)采取处理措施,并在与PC上位机意外断开通信时,可独立智能地控制测量工作正常的进行。
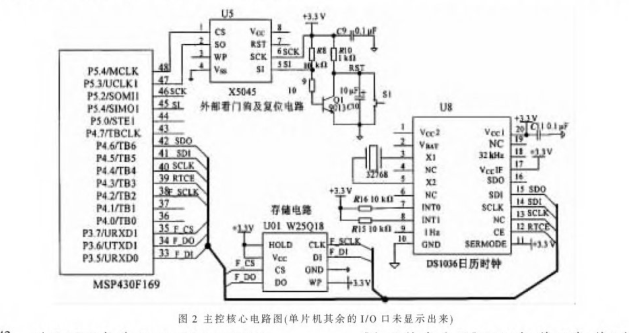
系统采用MSP430单片机,搭配外部Flash存储器、时钟威廉希尔官方网站 、复位威廉希尔官方网站 等组成控制核心的硬件。单片机自带的电压测量模块用于电池电压的测量,实现对剩余电量的实时监控;Flash存储器用于保存采集的数据与参数变量;时钟威廉希尔官方网站 为系统提供时间信息及预设时刻的采集触发中断;复位威廉希尔官方网站 用于单片机在出现意外故障时重启系统。控制核心主要威廉希尔官方网站 如图2所示。
2.2 设备电源管理模块
多源信息监控需搭载多个设备,在系统中单片机控制设备电源管理模块负责各设备的电源供给,包括电压转换和电源控制,如图3所示。
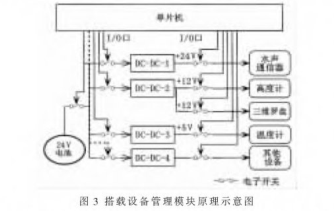
电压转换部分通过多个不同型号的隔离型DC-DC电压变换器把+24 V电池电压转换为+24 V、+12 V或+5 V,分别给水下各设备独立供电。采用隔离型DC-DC电压变换器[8],可以提高系统的抗干扰性和稳定性。
电源控制部分采用光隔离型场效应管作为多通道电子开关,每个通道的开关控制一路设备电源,单片机通过I/O口驱动控制开启/关闭设备的电源。
系统以设备电源管理模块为硬件基础,通过合理编写单片机软件,软件按照预定的顺序逐个操作设备,读取完测量数据后立刻关闭该设备,避免干扰和测量紊乱。
2.3 通信模块
通信模块在硬件上包括带光电隔离的RS-485通信器、ADSL转换器、水声通信器以及多个上电控制开关。控制核心与搭载设备、电法仪之间采用隔离型RS-485通信,使通信两端电气隔离,提高系统抗干扰性与稳定性;控制核心与PC上位机根据距离选用不同的通信方式:拖曳体位于浅水区时采用RS-485或水声通信, 位于深水区或拖曳距离较远时采用水声通信或ADSL通信。
控制核心采用主从总线式通信结构,通过RS-485总线与多个设备通信。当需要与某个设备通信时,控制核心打开该设备的串口电源与之通信,其他设备的串口无效。每次总线上只有一个设备与控制核心通信,最大限度地节省串口资源并保证了通信的灵活性[9]。
3 系统软件编程
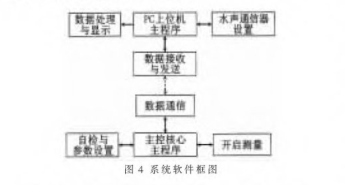
系统软件包括PC上位机软件和单片机主控核心软件。系统软件框图如图4所示。
3.1 PC上位机软件
PC上位机软件实时监控拖曳体信息,实现的主要功能有:(1)通过通信口与单片机控制核心进行数据交流、发送指令;(2)设置控制核心的工作方式;(3)设置、启动电法仪进入测量工作;(4)接收信息并处理存储数据,以曲线形式显示给用户;(5)对ATM88x型号水声通信器进行相关设置等。
3.2 单片机主控核心软件
单片机主控核心软件包括自检、参数设置、测量和数据通信等,系统主程序流程如图5所示。系统上电后开始运行,初始化串口、定时器、I/O口、日历时钟等,进入低功耗等待状态,以减小电量消耗。当定时器触发信号或串口产生通信中断时,系统退出低功耗模式,单片机对中断信息进行判别,选择进入系统自检、开启测量、参数设置。
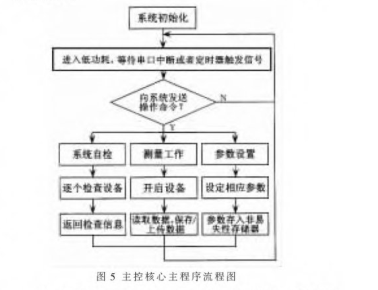
启动系统自检程序后,主控核心测试拖曳体的所有硬件状态,包括外部搭载设备的连接状态、电池电量等。检测完毕后,返回自检的数据至PC上位机。
启动开启测量程序后,主控核心按预定顺序开启、读取、关闭设备,将测量数据保存至Flash存储器,并将数据持续或固定时间间隔上传至PC上位机。
在PC上位机进行姿态监控或电法测量前先启动参数设置程序,包括启动/结束测量时刻、上传时间间隔、预警值设定、时钟校准、休眠等待时间等。主控核心修改完自身运行参数值后,将所有参数信息写入Flash存储器,下次系统重新工作时,将按照本次保存的参数自动运行。完成以上任一任务后,系统进入低功耗等待中断状态。
4 系统测试
在上述设计方案基础上研制了系统工作样机,并在东营近海进行了功能性测试和稳定性测试。将拖曳体放入水中,通过船载电缆拖曳作业。在功能测试阶段,PC上位机分别开启有缆和无缆通信方式,命令主控核心完成自检、参数设置、姿态信息测量、开启电法仪工作、数据上传等任务;在系统稳定性测试阶段,长时间监测拖曳体的舱内温度和剩余电压值等信息,同时保持电法仪的正常工作,并将测得的数据定时上传至水面PC上位机。
测试从16时开始至17时20分结束,历时80 min,在此期间两次开启了电法测量,测试结果如图6所示。图6(a)显示多源信息监控系统采集接收仓的不同位置温度的准实时变化曲线。其中T1为DC-DC模块处温度,T2为6 V电池处温度,T3为单片机处温度, T4为24 V电池处温度;图6(b)图为供电电池的电压实时监测曲线。图6(c)为电法仪的测量数据曲线,系统在PC上位机的命令下开启电法仪测量后,定时返回系统的测量数据。
测试结果表明,系统对各项命令反应及时、状态稳定,数据传输准确无误码,实现了对PC上位机、拖曳体、电法仪等多源信息的实时监控。系统设计合理,硬件与软件在水下运行稳定,抗干扰能力强。

水下拖曳体多源信息监控系统是深海电法探测设备的重要组成部分,本文设计的系统可以准确实时地监测拖曳体的运动信息,并将信息及时发送到水面上位机;通过有缆或水声无缆两种通信方式,及时获得PC上位机下传的命令信息和拖曳体上传的数据信息,并对信息进行实时处理;
可以对拖曳体上搭载的电法仪执行参数设置、启动测量、数据读取等多种操作。海上试验测试表明系统可靠性高,能够很好地满足拖曳体对多源信息的处理需求。同时,系统可以选择搭载水下摄像采集器[10]或其他传感器,满足不同的水下作业需求,可为海底地质结构的调查、海洋工程开发、水下考古、环境监测等进行信息采集服务,具有很强的拓展性。
作者:李先锋 李志华 郑彦鹏 吴 伟 曾 信
编辑:jq
-
区域性ATMP监控系统的设计和实现2010-04-24 0
-
【HarmonyOS HiSpark AI Camera】渔业卫士-基于图像识别的多自由度水下机器人2020-09-25 0
-
基于多源信息融合的车辆防碰撞控制系统2009-07-09 368
-
基于Web Services的多源异构空间信息集成框架2009-08-15 629
-
基于GIS的污染源管理信息系统设计与实现2009-12-12 523
-
基于Modbus多协议转换的警情信息远程监控系统_张腾飞2017-02-07 572
-
光纤以太网技术在水下拖曳系统中的应用2018-01-29 483
-
某拖曳水池重型拖车系统设计2018-02-28 430
-
智能绞车的水下实时剖面观测系统2018-02-28 584
-
海洋拖曳绞车液压系统设计与仿真研究2018-03-02 794
-
基于DSP+FPGA多视频通道视频监控系统剖析2020-01-08 1934
-
采用STM32F103VBT6处理器实现水下无线能量传输系统的设计2020-01-16 3432
-
利用电磁耦合器件实现水下设备供电的优化设计2021-06-22 2437
全部0条评论

快来发表一下你的评论吧 !
