

什么是调度?为什么要调度?
描述
什么是调度?按照某种调度算法,从进程的ready队列中选择进程给CPU。
为什么要调度?为了最大限度的利用CPU。
调度相关结构体
task_struct
我们先把task_struct中和调度相关的结构拎出来:
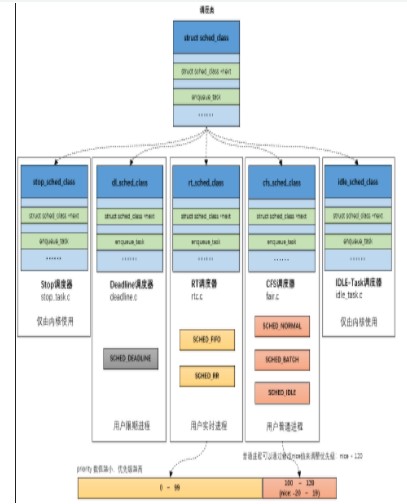
struct task_struct { ...... /* *调度类。用 sched_class 对调度器进行抽象 *Stop调度器:stop_sched_class *Deadline调度器:dl_sched_class *RT调度器:rt_sched_class *CFS调度器:cfs_sched_class *IDLE-Task调度器:idle_sched_class */ const struct sched_class *sched_class; //CFS调度实体 struct sched_entity se; //RT调度实体 struct sched_rt_entity rt; ...... #ifdef CONFIG_CGROUP_SCHED //任务组(在每个CPU上都会维护一个CFS调度实体、CFS运行队列; RT调度实体,RT运行队列) struct task_group *sched_task_group; #endif //DL调度实体 struct sched_dl_entity dl; ...... /* *进程的调度策略,有6种。 *限期进程调度策略:SCHED_DEADLINE。DL调度器 *实时进程调度策略:SCHED_FIFO,SCHED_RR。RT调度器 *普通进程调度策略:SCHED_NORMAL,SCHED_BATCH,SCHED_IDLE。CFS调度器 */ unsigned int policy; ...... }
struct sched_class 对调度器进行抽象,一共分为5类:
Stop调度器:优先级最高的调度类,可以抢占其他所有进程,不能被其他进程抢占;
Deadline调度器:使用红黑树,把进程按照绝对截止期限进行排序,选择最小进程进行调度运行;
RT调度器:为每个优先级维护一个队列;
CFS调度器:采用完全公平调度算法,引入虚拟运行时间概念;
IDLE-Task调度器:每个CPU都会有一个idle线程,当没有其他进程可以调度时,调度运行idle线程;
unsigned int policy 进程的调度策略有6种,用户可以调用调度器里的不同调度策略:
SCHED_DEADLINE:使task选择Deadline调度器来调度运行
SCHED_RR:时间片轮转,进程用完时间片后加入优先级对应运行队列的尾部,把CPU让给同优先级的其他进程;
SCHED_FIFO:先进先出调度没有时间片,没有更高优先级的情况下,只能等待主动让出CPU;
SCHED_NORMAL:使task选择CFS调度器来调度运行;
SCHED_BATCH:批量处理,使task选择CFS调度器来调度运行;
SCHED_IDLE:使task以最低优先级选择CFS调度器来调度运行;
struct sched_entity se;采用CFS算法调度的普通非实时进程的调度实体
struct sched_rt_entity rt;采用Roound-Robin或者FIFO算法调度的实时调度实体
struct sched_dl_entity dl; 采用EDF算法调度的实时调度实体
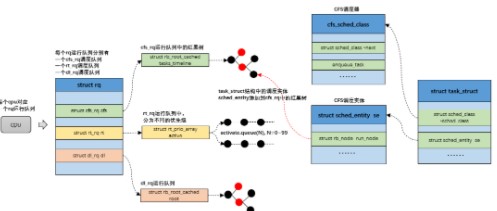
分配给CPU的task,作为调度实体加入到运行队列中
runqueue 运行队列
struct rq { ...... //三个调度队列:CFS调度,RT调度,DL调度 struct cfs_rq cfs; struct rt_rq rt; struct dl_rq dl; ...... //idle指向空闲内核线程, stop指向迁移内核线程 struct task_struct *curr, *idle, *stop; ...... }
三个调度队列:
struct cfs_rq cfs; CFS调度队列
struct rt_rq rt; RT调度队列
struct dl_rq dl; DL调度队列
每个CPU都有一个运行队列,每个运行队列中有三个调度队列,task作为调度实体加入到各自的调度队列中。
调度流程
调度的本质就是选择下一个进程来运行,调度的过程分为两步:
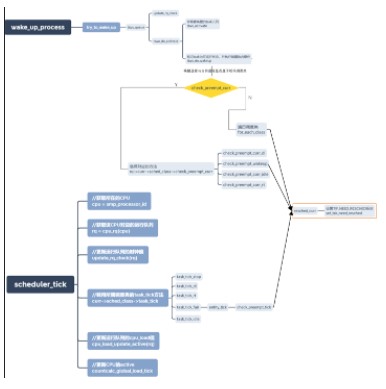
1. 设置调度标记
为CPU上正在运行的进程thread_info结构体里的flags成员设置TIF_NEED_RESCHED。
那么,什么时候设置TIF_NEED_RESCHED呢 ?
scheduler_tick 时钟中断
wake_up_process 唤醒进程的时候
do_fork 创建新进程的时候
smp_send_reschedule 负载均衡的时候
set_user_nice 修改进程nice值的时候
以上情况下都会通过 resched_curr 来设置进程thread_info结构体里的flags成员为TIF_NEED_RESCHED。以 scheduler_tick 和 wake_up_process 为例:
关于是否需要设置TIF_NEED_RESCHED的依据涉及到具体的调度算法,等我们讲到具体调度器时再详细讲。
2. 执行调度
kernel判断当前进程标记是否为TIF_NEED_RESCHED,是的话调用 schedule 函数切换上下文,kernel空间是可以关抢占的,user空间是无法关抢占的。抢占可分为内核态抢占和用户态抢占
用户态抢占
ret_to_user是系统调用,异常触发,中断处理完成后都会调用的函数。
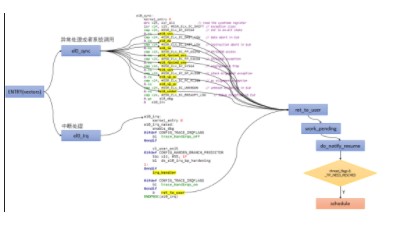
内核态抢占
进程切换上下文 context_switch
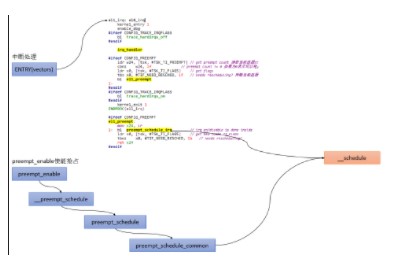
通过上面我们知道执行调度的时候发生在 _schedule 函数里。
重点是其中的两个函数,一个是选择需要切换任务的 pick_next_task,另外一个是完成进程上下文切换 context_switch。
关于选择task的策略涉及到不同的调度类,等我们讲到具体调度器的时候再展开,这里重点讲下上下文切换的函数 context_switch,进程上下文切换主要涉及到两部分主要过程:进程地址空间切换和处理器状态切换:
进程的地址空间切换
将下一个进程的pgd虚拟地址转化为物理地址存放在ttbr0_el1中(这是用户空间的页表基址寄存器),当访问用户空间地址的时候mmu会通过这个寄存器来做遍历页表获得物理地址。完成了这一步,也就完成了进程的地址空间切换,确切的说是进程的虚拟地址空间切换。
寄存器状态切换
其中x19-x28是arm64 架构规定需要调用保存的寄存器,可以看到处理器状态切换的时候将前一个进程(prev)的x19-x28,fp,sp,pc保存到了进程描述符的cpu_contex中,然后将即将执行的进程(next)描述符的cpu_contex的x19-x28,fp,sp,pc恢复到相应寄存器中,而且将next进程的进程描述符task_struct地址存放在sp_el0中,用于通过current找到当前进程,这样就完成了处理器的状态切换。
责任编辑:lq6
-
如何利用UCOS引发任务调度?2019-10-24 0
-
请问FreeRTOS是如何实现调度的?2020-07-30 0
-
调度器的原理及其任务调度代码实现2022-02-17 0
-
EPA通信调度测试方法与实现技术2009-03-16 532
-
Linux 2.6进程调度2009-06-13 477
-
动态调度算法(DSA)2009-03-30 1767
-
调度自动化系统在优化电网调度中的应用2017-02-07 881
-
柔性负荷调度,发电调度的补充2018-05-24 7123
-
什么是调度?如何进行调度?2022-08-05 13680
-
智能调度什么意思2023-04-10 1230
-
智能调度什么意思 智能调度指标2023-04-11 3365
-
智能调度的好处 智能调度主要技术2023-04-11 3610
-
智能调度模式是什么 智能调度的优缺点2023-04-11 4286
-
CDN常见的调度类型有哪些2023-06-28 1515
-
CDN调度策略介绍2023-10-09 822
全部0条评论

快来发表一下你的评论吧 !
