

光纤陀螺仪系统设计方法
今日头条
1152人已加入
描述
光纤陀螺仪系统设计:DC检测方法[1]
使用理想元件,输出光电流(I)为
 (1)
(1)
其中 φs 是萨格纳克相移 , Io 是以零角速度情况计算出的电流
 (2)
(2)
P 是光源光功率, σ 是光电检测器的响应度(在我们的案例中等于1)。在等式(2)中将光功率除以2是因为在耦合器处功率损失了一半。 一旦 φs 确定了, 我们可以计算
 (3)
(3)
其中 L 是光线长度, D 是环直径, λ 是光源波长,由此来确定环路Ω 的角速度。注意,由于等式(1)具有余弦,因此直流技术无法区分正负速度。
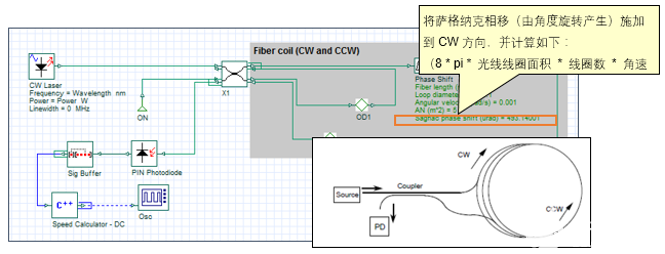
图1.FOG DC检测布局
光纤陀螺仪系统设计:相位调制方法[2]
当尝试测量非常低的角旋转速率时,DC方法不是很准确,所以通常使用相位调制技术。 对于该设置,光检测信号
 (4)
(4)
将相位调制器幅度选择到+/-0.9 rad ,给出最大化J1(Φm) = 0.581517 的项Φm = 1.8 。提取调制频率ωm的余弦级数
 (5)
(5)
公式3得到角速度。我们可以重新排列找到φ_
责任编辑:tzh
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
几种高精度陀螺仪的应用和分析2018-11-09 0
-
常见的七大陀螺仪2020-09-06 0
-
怎么实现基于FPGA的数字闭环光纤陀螺仪模拟表头设计?2021-05-10 0
-
陀螺仪有什么用_陀螺仪的特性图解_陀螺仪的应用2017-12-01 10390
-
MEMS陀螺仪可否取代光纤陀螺仪技术2018-02-24 9635
-
浅谈MEMS陀螺仪技术 MEMS是否取代光纤陀螺仪技术2018-07-30 13640
-
光纤陀螺仪测试方法的国家标准的详细资料免费下载2018-12-19 2137
-
光纤陀螺仪性能指标2019-02-22 15957
-
光纤陀螺仪应用2019-02-22 7425
-
光纤陀螺仪与旋转式陀螺仪的工作原理解析2019-10-10 8390
-
Boreas数字光纤陀螺仪介绍2022-11-01 1253
-
怎么解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别2023-08-21 6814
-
陀螺仪是什么?陀螺仪工作原理2023-10-08 5410
-
MEMS陀螺仪系统的精确导航2023-10-24 1979
-
手机陀螺仪失灵解决方法2024-01-30 28999
全部0条评论

快来发表一下你的评论吧 !
