

如何在RTOS中处理微控制器的低功耗特性
电子说
描述
前言
目前, 越来越多的嵌入式产品在开发中使用 RTOS 作为软件平台, 同时,开发中对低功耗的要求也越来越高, 本文会讨论一下如何在 RTOS 中处理微控制器的低功耗特性。
应用中使用的 RTOS 一般采用基于时间片轮转的抢占式任务调度机制,一般的低功耗设计思路如下:
-
当
Idle任务运行时,进入低功耗模式; -
在适当的条件下,通过中断或者外部事件唤醒
MCU。
但是, 从第二点可以看出,每次当 OS 系统定时器产生中断时,也会将 MCU 从低功耗模式中唤醒,而频繁的进入低功耗模式/从低功耗模式中唤醒会使得 MCU 无法进入深度睡眠,对低功耗设计而言也是不合理的。
在 FreeRTOS 中给出了一种低功耗设计模式 —— Tickless Idle Mode, 这个方法可以让 MCU 更长的时间处于低功耗模式。
Tickless Idle Mode 的原理及实现
情景分析
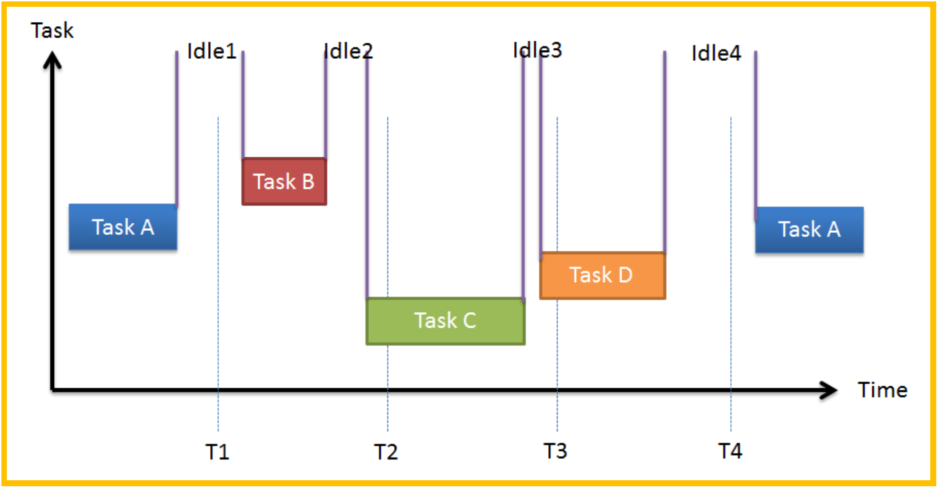
上图是任务调度示意图,横轴是时间轴, T1, T2, T3, T4 是 RTOS 的时间片基准,有四个任务分别是 TaskA,TaskB,TaskC,TaskD:
-
Task A,周期性任务 -
Task B, 周期性任务 -
Task C,突发性任务 -
Task D,周期性任务
从图中可以看出在四个任务进行调度之间,会有四次空闲期间(此时 RTOS 会调度 Idle 任务运行, 软件设计的目标应该是尽可能使 MCU 在 Idle 任务运行时处于低功耗模式)。
1. Idle1
Idle 任务运行期间,会产生一次系统时钟滴答,此时会唤醒 MCU,唤醒后 MCU 又会进入低功耗模式, 这次唤醒是无意义的。期望使 MCU 在 Idle1 期间一直处于低功耗模式, 因此适当调整系统定时器中断使得 T1 时不触发系统时钟中断, 中断触发点设置为 Task B 到来时。
2. Idle2
Task C 在系统滴答到达前唤醒 MCU(外部事件),MCU 可以在 Idle2 中可以一直处于低功耗模式;
3.Idle3
与 Idle2 情况相同,但 Idle3 时间很短,如果这个时间很短,那么进入低功耗模式的意义并不大,因此在进入低功耗模式时软件应该添加策略;
4. Idle4
与 Idle1 情况相同。
Tickless Idle Mode 的软件设计原理
Tickless Idle Mode 的设计思想在于尽可能地在 MCU 空闲时使其进入低功耗模式。从上述情景中可以看出软件设计需要解决的问题有:
-
合理地进入低功耗模式(避免频繁使
MCU在低功耗模式和运行模式下进行不必要的切换);RTOS的系统时钟源于硬件的某个周期性定时器(Cortex-M系列内核多数采用SysTick),RTOS的任务调度器可以预期到下一个周期性任务(或者定时器任务) 的触发时间,如上文所述,调整系统时钟定时器中断触发时间,可以避免RTOS进入不必要的时间中断,从而更长的时间停留在低功耗模式中,此时 RTOS 的时钟不再是周期的而是动态的(在原有的时钟基准时将不再产生中断,即Tickless)。 -
当
MCU被唤醒时,通过某种方式为系统时钟提供补偿。MCU可能被两种情况所唤醒,动态调整过的系统时钟中断或者突发性的外部事件,无论是哪一种情况,都可以通过运行在低功耗模式下的某种定时器来计算出MCU处于低功耗模式下的时间,在MCU唤醒后对系统时间进行软件补偿; -
软件实现时,要根据具体的应用情景和
MCU低功耗特性来处理问题。尤其是MCU的低功耗特性,不同MCU处于不同的低功耗模式下所能使用的外设(主要是定时器) 是不同的,RTOS的系统时钟可以进行适当的调整。
Tickless Idle Mode 的实现
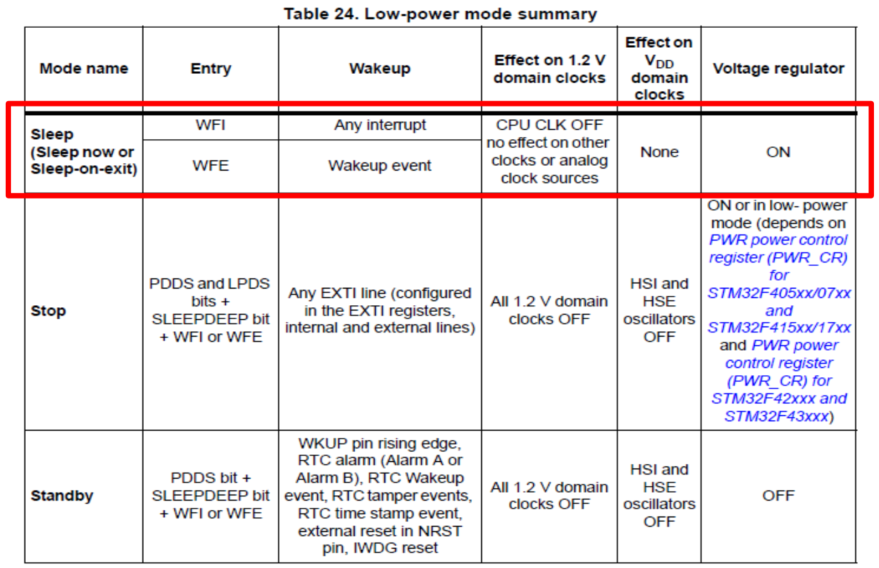
这里以 STM32F407 系列的 MCU 为例, 首先需要明确的是 MCU 的低功耗模式, F407 有 3 种低功耗模式:Sleep,Stop, Standby, 在 RTOS 平台时, SRAM 和寄存器的数据不应丢失, 此外需要一个定时器为 RTOS 提供系统时钟, 这里选择 Sleep 模式下进行实现。
1. 使能
#define configUSE_TICKLESS_IDLE 1
2. 空闲任务(RTOS 空闲时自动调用)
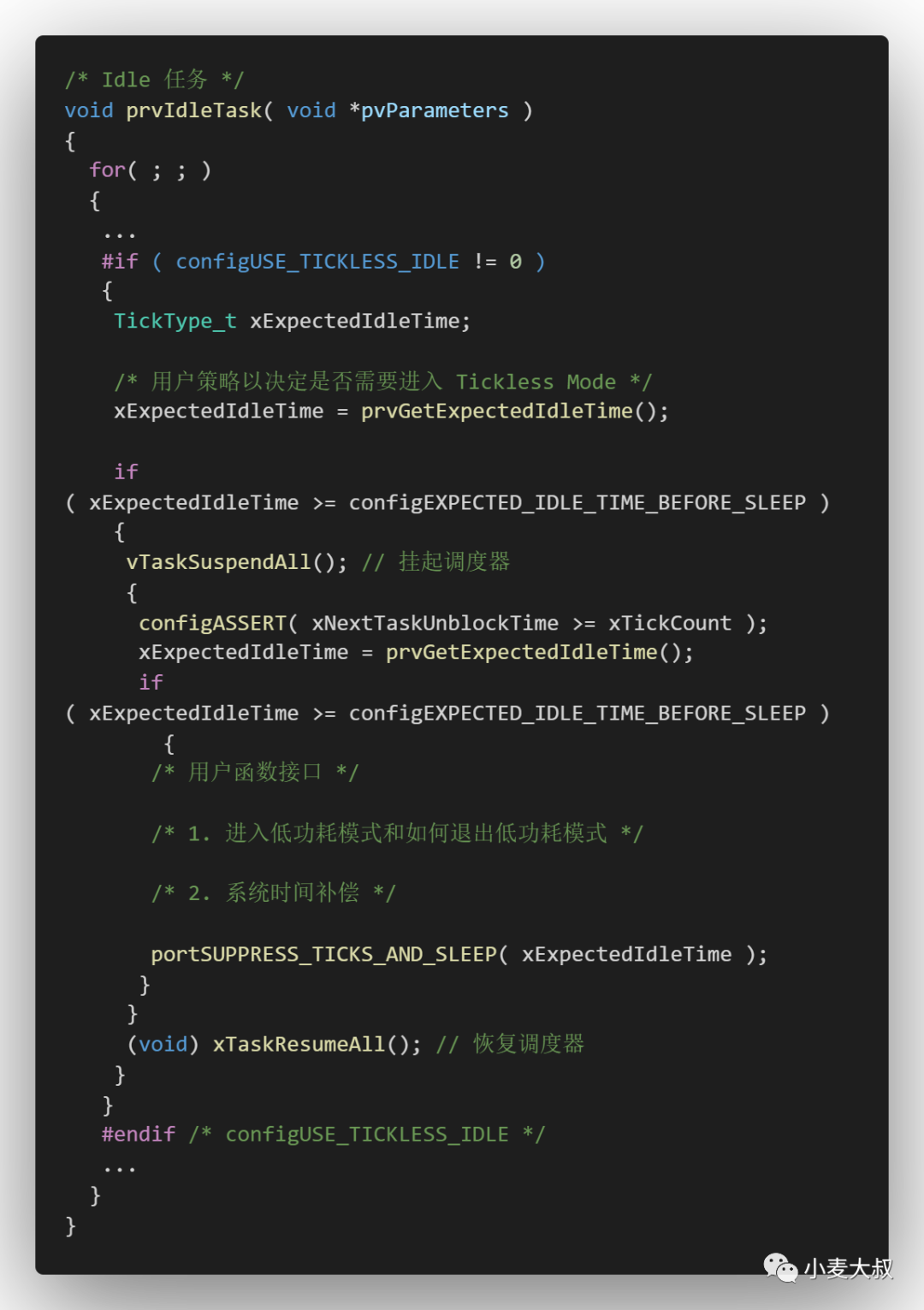
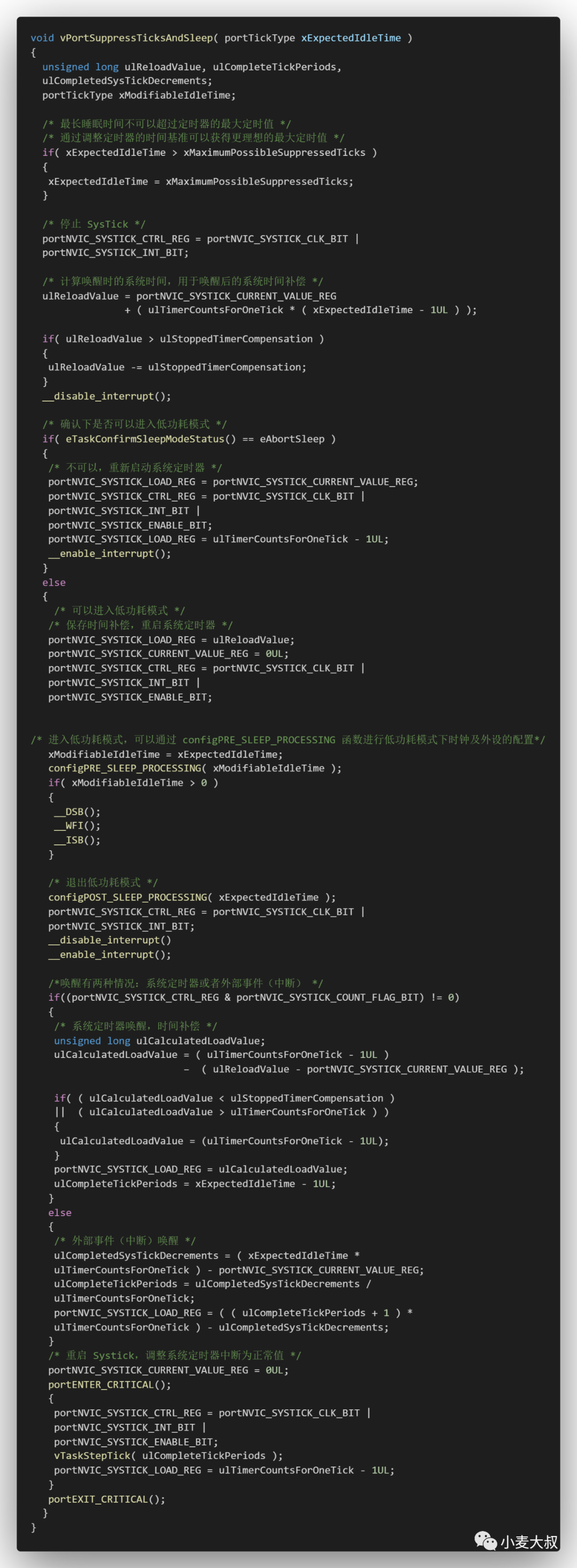
3. 低功耗模式处理(根据 MCU 的低功耗模式编写代码, 代码有点长……)
最后
STM32 家族中拥有不同的系列,特别是专为低功耗应用设计的 L 系列,为其设计 RTOS 低功耗特性实现时可以有更多的实现方式(例,某种模式下内核停止运行, 此时可以使用外部定时器或者 RTC 来代替 Systick 作为系统定时器)。
原文标题:实时系统低功耗原理及实现,非常实用的方案
文章出处:【微信公众号:硬件攻城狮】欢迎添加关注!文章转载请注明出处。
-
RTOS低功耗设计原理及实现_TicklessMode(FreeRTOS的实现)2017-11-10 0
-
基于微控制器的选择解读超低功耗意义2019-07-22 0
-
选择低功耗微控制器开发,避免资源受限规则2019-12-27 0
-
微控制器功耗管理模式:降低功耗的方式2020-02-06 0
-
如何在微控制器上使用RTOS?2020-03-05 0
-
低功耗模式下微控制器时钟配置应用2009-04-22 375
-
优化面向超低功耗设计的微控制器功效2010-01-06 985
-
什么是低功耗微控制器?2017-07-24 824
-
基于LPC1100微控制器的低功耗特性2017-09-26 693
-
低功耗微控制器MSP430的应用2017-10-12 836
-
介绍SAM4L微控制器低功耗的特性是什么?2018-07-06 3763
-
RTOS低功耗设计原理的讲解和实现概述2020-04-15 1058
-
ADuCM4050超低功耗微控制器2021-05-13 716
-
RL78微控制器时实现低功耗的应用示例2023-07-23 1267
全部0条评论

快来发表一下你的评论吧 !
