

一文详解Arm Cortex-M处理器指令集
描述
Arm处理器是基于精简指令集计算机(RISC)原理设计的,指令集和相关译码机制较为简单,具有32位Arm指令集和16位Thumb指令集,Arm指令集效率高,但是代码密度低,而Thumb指令集具有更好的代码密度,却仍然保持Arm的大多数性能上的优势,它是Arm指令集的子集。所有Arm指令都是可以有条件执行的,而Thumb指令仅有一条指令具备条件执行功能。Arm程序和Thumb程序可相互调用,相互之间的状态切换开销几乎为零。
Cortex-M0处理器基于ARMv6-M架构,是一款功耗和性能较为均衡的处理器。Cortex-M0只支持56条指令的小指令集,其中大部分指令是16位指令。
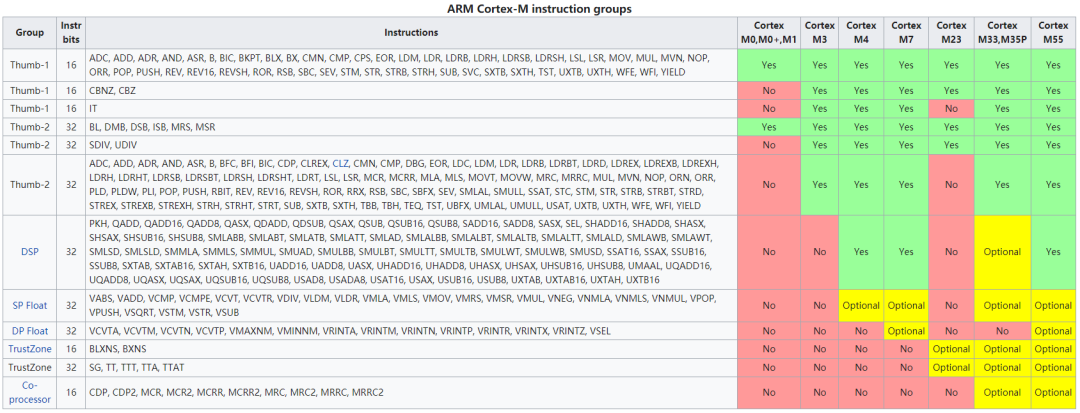
Arm Cortex-M 指令集对比:
1. 指令集
1.1 在处理器内移动数据
MOV
1.2 存储器访问
确保访问的内存地址是对齐的,这一点很重要。在ARMv6-M架构(包括Cortex-M0和Cortex-M0处理器)上不支持非对齐传输。任何未对齐内存访问的尝试都会导致HardFault异常。
LDR
1.3 栈空间访问
PUSH {
1.4 算数运算
ADD
1.5 逻辑运算
ANDS
1.6 移位和循环操作
ASRS
1.7 展开和顺序反转操作
这些反向指令通常用于在小端和之间转换数据大整数。
REV
1.8 扩展操作
它们通常用于数据类型转换。
SXTB
1.9 程序流控制
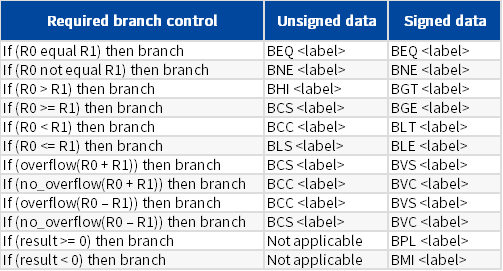
B
条件转移指令B
1.10 内存屏障指令
在Cortex-M0和Cortex-M0处理器上支持内存屏障指令,从而在Cortex-M处理器和其他ARM处理器家族中提供更好的兼容性。
//数据内存屏障,确保所有内存访问都完成 //在新的内存访问被提交之前。
DMB
//数据同步屏障,确保所有的内存访问都完成 //在执行下一条指令之前。
DSB
//指令同步障碍,刷新管道和 //确保之前所有的指令都已完成 //在执行新指令之前。
ISB
1.11 异常相关指令
SVC
1.12 睡眠模式功能相关说明
//等待中断,停止程序执行,直到一个中断到达, //如果处理器进入调试状态。
WFI
//等待事件,如果设置了内部事件寄存器,则清除 //内部事件注册和继续执行。 //停止程序执行,直到事件(如中断)到达 //如果处理器进入调试状态。
WFE
//发送事件,设置本地事件寄存器并发送一个事件脉冲 //多处理器系统中的其他微处理器。
SEV
1.13 其他说明
NOP ; No Operation BKPT
2. 指令说明
2.1 可访问high registers的指令
绝大部分指令只能访问low registers,也就是只能访问R0~R7寄存器。可以访问high registers的指令只有两条,这两条指令都不更新APSR,指令没有S后缀。
MOV
其它两条和SP加法有关的可以访问high registers的指令其本质是ADD指令。
ADD SP,
2.2 分配临时变量的指令
函数内的临时变量分配到堆栈,进入函数给临时变量分配空间时使用SUB指令。
SUB SP, SP, #immed7 ; SP = SP – ZeroExtend(#immed7<<2)
退出函数释放临时变量空间时使用ADD指令。
ADD SP, SP, #immed7 ; SP = SP + ZeroExtend(#immed7<<2)
上面两条指令的立即数只有7位,最多可以增减SP指针127个字空间,如果超过127个字,使用这条指令:
ADD SP,
只有ADD指令,没有SUB指令,如果需要SUB,那么给Rm赋值负数即可。
2.3 取临时变量地址的指令
在堆栈分配了临时变量空间后,总要取得临时变量的地址才能做进一步的操作。
ADD
立即数不够,可以用寄存器。
ADD
2.4 RSBS指令
RSBS
这是倒过来的减法,常量减去寄存器值,而且常量只能是0。所以这条指令实质上就是一条取负数指令。
Rd = 0 - Rm 等价于:Rd = -Rm Rd 寄存器值等于负的 Rm 寄存器值。
原文标题:技术分享 | Cortex-M0中断控制和系统控制(六)
文章出处:【微信公众号:安芯教育科技】欢迎添加关注!文章转载请注明出处。
-
单片机、Cortex-M、Linux它们和嵌入式有什么区别?2021-07-05 2988
-
如何选择正确的Cortex-M处理器?2020-10-22 0
-
ARM Cortex-M处理器详解 精选资料分享2021-07-16 0
-
谈一谈ARM处理器的指令集与工作模式2022-05-26 0
-
Arm Cortex-M处理器—Cortex-M85介绍2022-07-15 0
-
介绍易于使用的Arm Cortex-M处理器上的信号处理功能2022-07-29 0
-
ARM Cortex-M处理器对比表2023-08-29 0
-
微处理器指令集设计2008-10-29 722
-
ARM指令集详解2010-03-09 953
-
【ARM白皮书】ARM Cortex-M处理器入门2017-04-20 1672
-
Cortex-M系列处理器指令集_指令集特性比较总结2018-04-18 7961
-
从Cortex-M到 Cortex-A认识ARM处理器2020-03-08 3458
-
ARM处理器的寻址方式和指令集介绍2020-11-24 1164
-
Cortex-M跑Linux操作系统能行吗2021-07-19 1937
-
单片机、Cortex-M与Linux和嵌入式有什么区别2021-09-26 2295
全部0条评论

快来发表一下你的评论吧 !
