

如何利用超声波传感器制作一个轮式自平衡机器人
描述
这是一个轮式自平衡机器人。由 Arduino UNO 供电并由超声波传感器平衡,同时它能够自我保持垂直平衡。
动力源

动力由两个齿轮直流电机为机器人提供。
构建
第一步:将连接到齿轮直流电机


现在我们将轮子连接到电机的轴上。
第二步:准备 PVC T 型接头

这是PVC管的T型接头。我们将用它来固定电机,电线将从顶部的孔中出来。
第三步:通过 T 形接头为电机接线
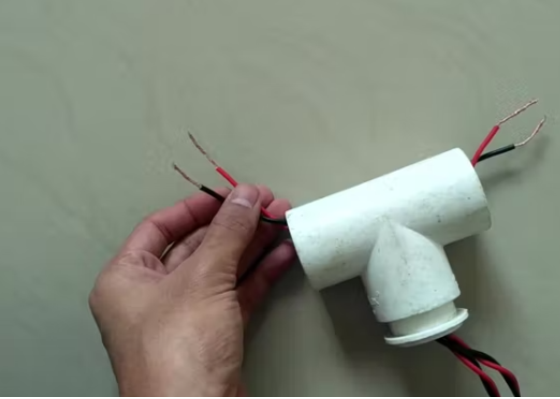
在将电机固定在该管道中之前,我们必须将它们接线。我们将从顶孔穿过 4 根电线。两端分体,每台电机2根线。
第四步:通过顶孔拉线

我们将从 T 型接头拉回电线,以便电机就位。
第五步:将电机固定到位

现在我们已将电机固定在 T 形接头中。
第六步:在顶孔中添加管道以安装超声波传感器

我们在 T 形接头的线端添加了一些管道,稍后我们将在其上安装传感器。
威廉希尔官方网站 原理图
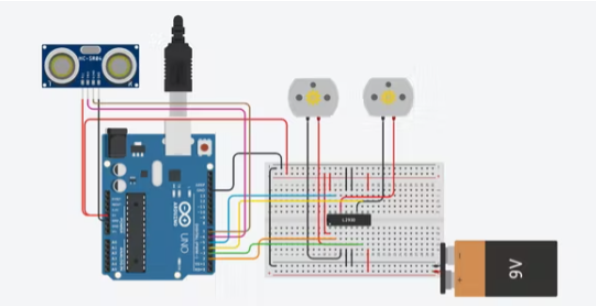
威廉希尔官方网站 原理图我们使用 L2938 H 桥电机驱动器 IC 来双向旋转电机。
自平衡机器人的概念

这个自平衡机器人的概念很简单。我们有一个超声波传感器,它能够测量机器人与前面障碍物的距离。
如果距离大于固定距离,则机器人将向前移动;如果距离小于固定距离,则机器人将向后移动避免摔倒。
使用 Arduino 为自平衡机器人连接超声波传感器

超声波传感器有 4 个引脚,分别是触发、回波、电源和接地。4 根线从引脚连接到微控制器。
平衡机器人机体

现在,机器人垂直放置在地面上。看起来它是平衡的,因为它在通过不断地移动以保持自身平衡。但与此同时,其实它也从我手里拿着的电线得到了一些支持。
它不断地来回振荡,这些振荡需要被阻尼。因此,机器人将保持平衡并站立在一个点上而没有任何移动。
可能遇到的问题与解决方案

如果它超出特定点,那么它将无法自行恢复。这些电机需要更多的功率才能快速响应。
在测试时,L293D 的第二个 H 桥被炸了。所以,我没有机会通过 PID 来控制它。
为了真正做到平衡,我们可以使用 MPU-6050 惯性测量单元。相反,我们使用了这种便宜的超声波传感器。
自平衡机器人的CAD设计
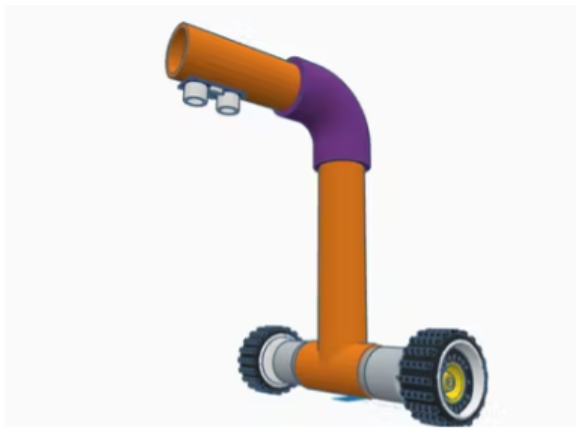
这是轮式自平衡机器人的 CAD 设计。在这里我们可以看到两个电机,连接着两个轮子。这些电机安装在 PVC T 形接头中。垂直 PVC 管连接到 T 形接头,超声波传感器连接在管道上。
结论
不过好在项目的最后,我们还是设法使它平衡了一点。这个结果对我来说,还是挺满意的,一切努力都没有白费。
-
基于超声波传感器的自主移动机器人的探测系统2012-01-19 0
-
转:NANO—东半球最小的自平衡机器人(硬件+源码+3D文件)2016-07-25 0
-
关于两轮自平衡机器人载重问题2016-11-24 0
-
超声波传感器在机器人中的应用2018-08-09 0
-
基于超声波传感器的自主移动机器人探测系统2018-11-02 0
-
超声波传感器在机器人避障中有什么作用2019-02-27 0
-
超声波传感器的优势及原理2020-06-19 0
-
机器人应用的超声波传感器解决方案2020-08-18 0
-
移动机器人超声波测距功能设计2021-10-08 0
-
制作一个迷你平衡机器人2022-07-07 0
-
机器人超声波传感器MB7360的参数性能及应用分析2020-04-21 3270
-
基于ATmage128单片机和红外测距传感器实现自平衡机器人系统的设计2021-04-13 2449
-
使用超声波传感器和Arduino构建一个避障机器人2022-09-08 3387
-
如何制作WiFi控制的自平衡机器人2022-10-28 598
-
基于Arduino UNO的自平衡机器人2022-12-08 341
全部0条评论

快来发表一下你的评论吧 !
