

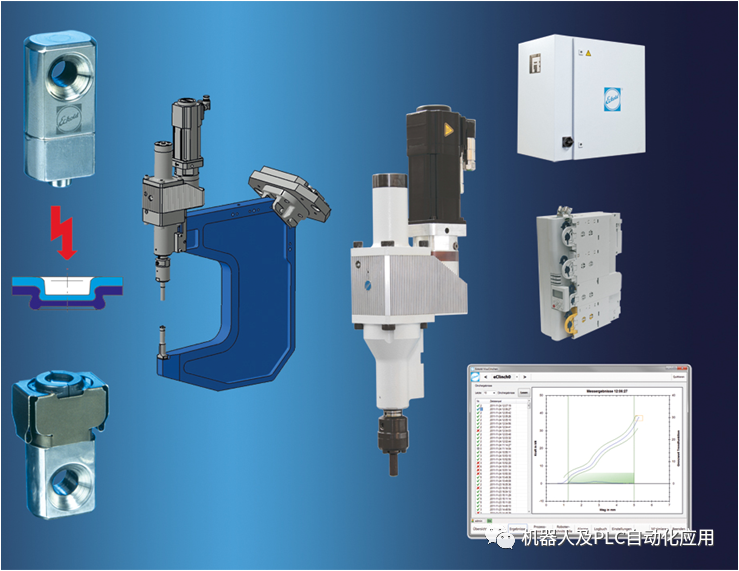
什么是ECKOLD技术
描述
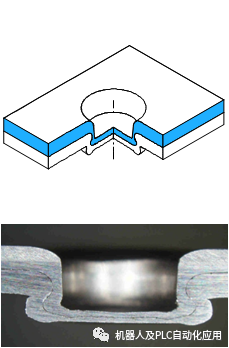
什么是铆接
•铆接是用钢、铝或不锈钢制成的板材和型材的连接技术。•铆接技术允许通过局部冷成型连接两个或多个细金属板。•这种接合方法的主要优点在于,正铆接元件是由要连接的板的材料形成的。因此不需要辅助材料或部件,例如铆钉或钎焊焊剂。
铆接的主要特点
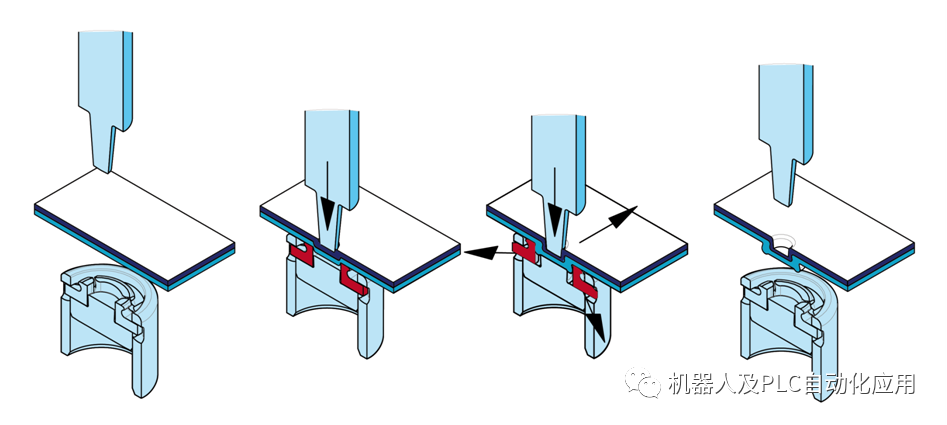
• 铆接接头是由工具的一次连续冲程产生的。
• 单程连接可以用具有单侧驱动器的机器来实现。
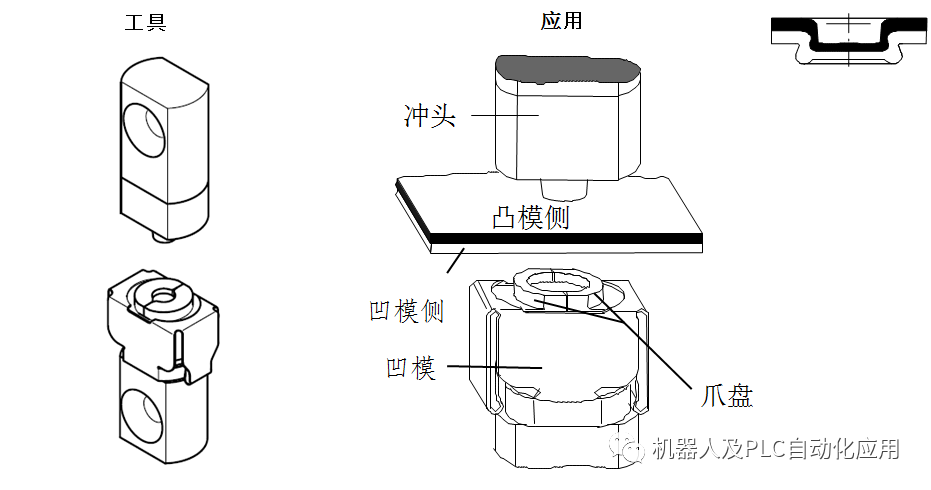
• 各种铆接工具的几何形状满足单个机器中不同应用的范围。
• 有或没有切割的铆接技术
• 冲压工具套件通常由冲头和凹模组成(例外:F—DF)。

什么是ECKOLD技术


伺服电机驱动单元
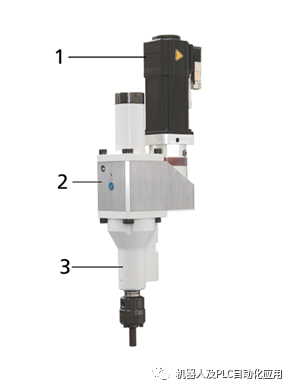
安装在铆接框架中的驱动单元包括:
1伺服电机
2行星齿轮
3带主轴的壳体
在驱动侧的模具架不是驱动单元组件的一部分,而是形成一个单独的组件。
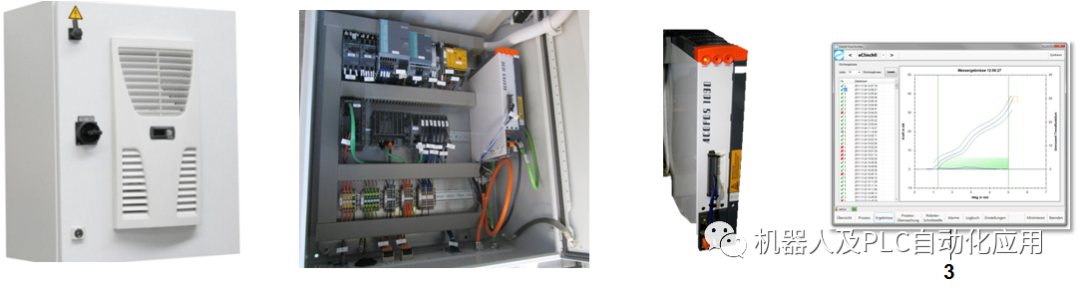
带有伺服调节器和集成过程监控系统的控制柜,包括软件:
1.控制柜
2.具有集成过程监控系统的伺服调节器
3.通过ECKOLD软件(通过客户提供的系统,在现有工业PC上)进行过程监视和控制的可视化.
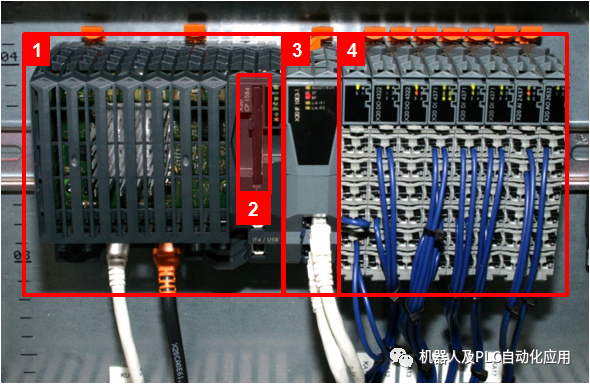
过程监控系统
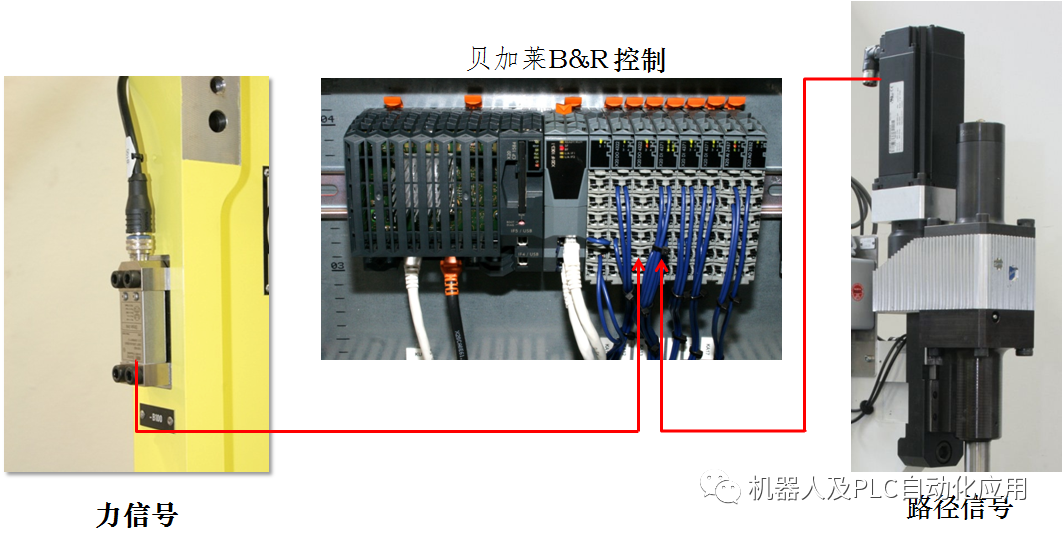
CPU,包括:
1•贝加莱X20 CPU
2•存储卡
3•带总线模块的插槽
4•输入输出模块
所有组件可以很容易地更换,因为他们是插槽式。
使用老CPU的存储卡!数据不会丢失。
贝加莱ACOPOS伺服驱动器

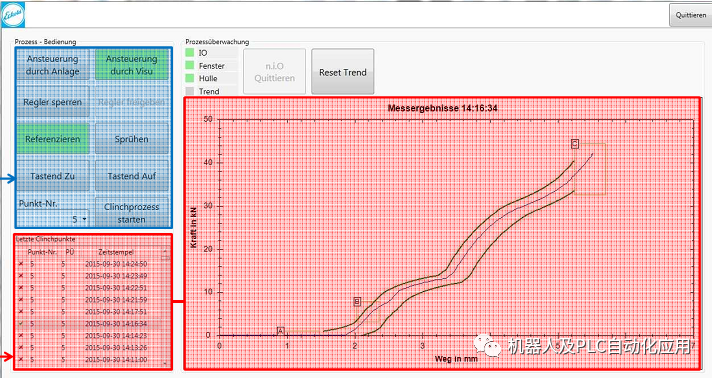
通过 Eckold 可视化进行手动操作
最后的结果和力-位移曲线的表示

1.控件的选择
绿色 = 选定的控件
2.锁定或解锁电机线电压
3.手动参考系统
绿色 = 参考/红色 = 未参考
4.触发喷雾脉冲/持续时间200 ms
5. 微动模式打开或关闭的压紧杆
6. 敲定程序的选择,其中
需手动操作
7. 使用参数开始铆接过程
选定的铆接程序
添加CZ铆钳的组态
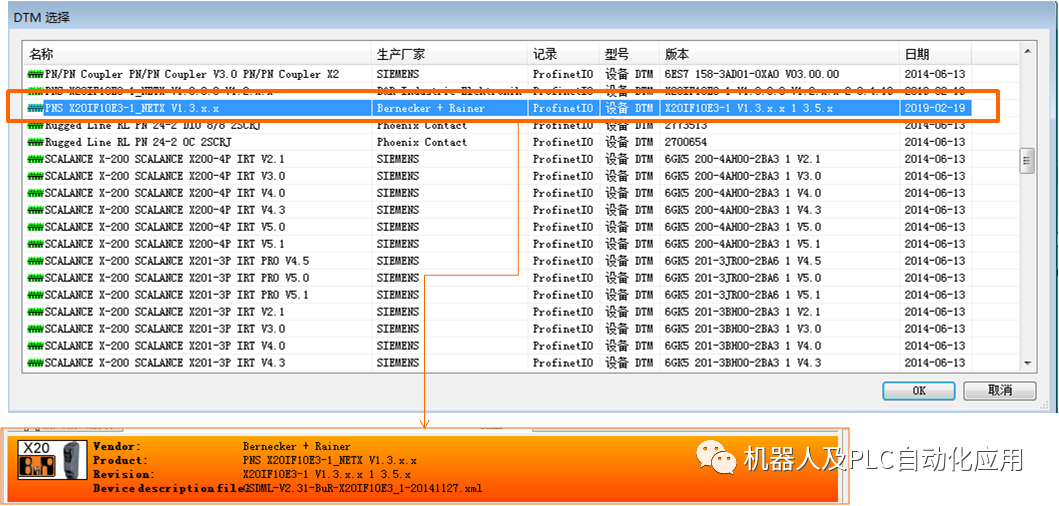
分配IO点
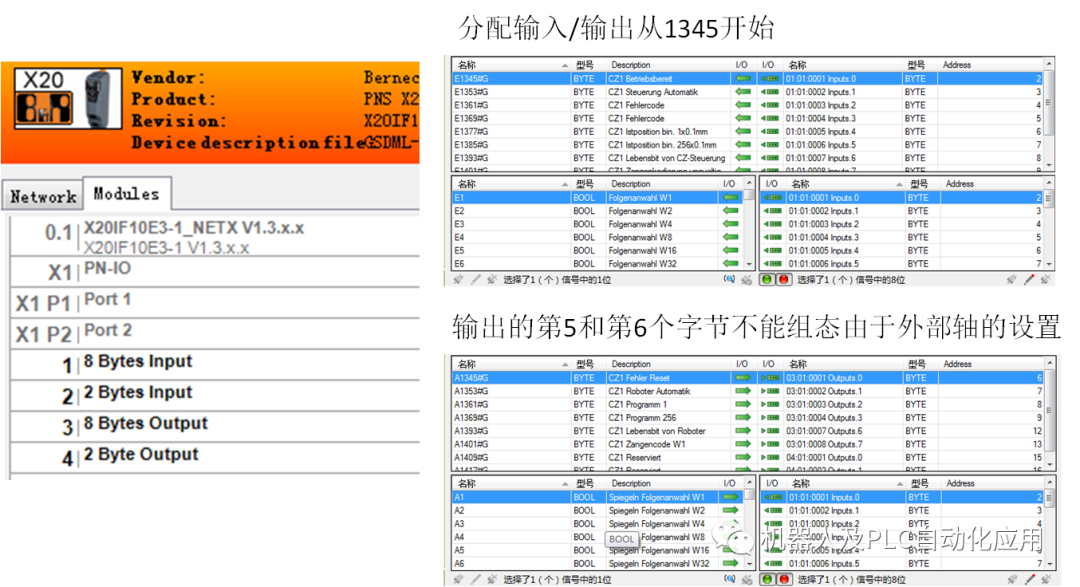
标准程序分析:
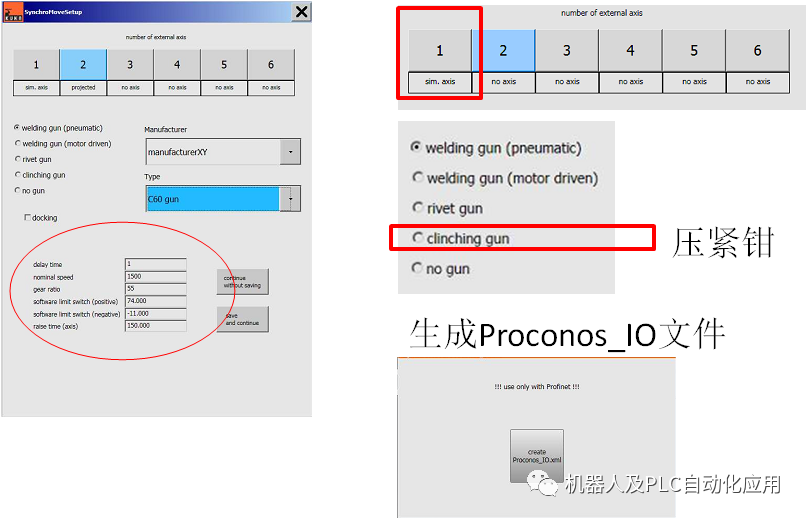
1.CZ 压钳需要配置外部轴。(基于8.2系统的大众VASS05)
标准程序分析:
Makro280 压接启动
Makro281 寻找参考位
Makro282 监控开启/关闭
F538 带压钳
F458 带喷压接油 油量的E519报警和E518预警在S7CUP中使用
F454 用在机器人上
M116 = E1345 & !E1349 & E1353 & E1354 &(!E1355 + A1355) & !E1413 & !E1419 & A1356
E1345准备就绪 !E1349节能模式已开启 E1353自动控制 E1354钳子在原位
!E1355定位有效 A1355发布定位!E1413程序错误 !E1419紧固i.O.
A1356目标位置有效
MAKRO280压接启动
A177 = EIN -----------给PLC控制开启压紧工作
t12 ( E15 ) = p26[1/10Sek]
WARTE BIS T12 + !E15 空运转时跳到最程序最下步
GOTO Label 1 = E15
t10 ( EIN ) = -20[1/10Sek]
WARTE BIS E1345 & !E1349 + T10 E1345准备就绪 !E1349节能模式关闭
F453 = T10
WARTE BIS E1345 & !E1349
F453 = AUS
A1358 = AUS 关上钳子
A1355 = EIN 发布定位
t10 ( EIN ) = -20[1/10Sek]
F489 = E1424 错误温度电机
WARTE BIS !E1358 & !E1424 + T10 E1358实现了力量 --E1424错误温度电机
F453 = T10
WARTE BIS !E1358 & !E1424
F453 = AUS
F489 = AUS
t10 ( EIN ) = -60[1/10Sek]
A1358 = EIN 关上钳子
WARTE BIS E1358 & !E1414 + T10 E1358实现了力量 E1414目标位置无效
F453 = T10
t10 ( EIN ) = -10[1/10Sek]
F447 = E1358 & !E1414 & !E1416 & !E1417& !E1420 & !E1421 & !E1422 & !E1424 F447压接合格
E1358实现了力量 E1414目标位置无效 E1416钳子运行困难 E1417压力过低E1420拉拽故障E1421内部备份错误
E1422错误控制器 E1424错误温度电机
F448 = E1414 + E1416 + E1417 + E1420 + E1421 + E1422 +E1424 -F448压接不合格,有问题
A1358 = AUS 关闭压接
WARTE BIS F447 & !F448 + T10 等待压接合格不故障
F453 = T10
WARTE BIS F447 & !F448 + E27 + E28 -等待压接不合格 –如果不合格 E27或E28可以跳过去
F453 = AUS
F449 = F448 & E28 -F449有故障跳过了
t10 ( EIN ) = -20[1/10Sek]
A1357 = !E1357 -----E1357打开钳子------ A1357打开钳子—若果没有打开钳口就打开钳口
WARTE BIS E1357 + T10 等待钳口打开
F453 = T10钳口打开超时
WARTE BIS E1357等待钳口打开
F453 = AUS
A1357 = AUS 关闭打开钳口
A1355 = AUS 关闭接换定位
t10 ( EIN ) = -20[1/10Sek]
WARTE BIS !E1355 + T10 等待定位有效关闭
F453 = T10 等待定位有效关闭超时
WARTE BIS !E1355
F453 = AUS
Label 1
A177 = AUS
----------------------------
MAKRO281寻找参考位
A177 = EIN
t10 ( EIN ) = -20[1/10Sek]
WARTE BIS !E1349 + T10 E1349节能模式已开启
F453 = T10 节能模式关闭超时
WARTE BIS !E1349
F453 = AUS
A1355 = EIN 开启定位
t10 ( EIN ) = -200[1/10Sek]
A1354 = EIN 寻参
WARTE BIS !E1354 钳没有在原位
WARTE BIS E1345 & E1354 + T10 钳子有准备就绪, 钳子在原位
F453 = T10 校准超时
WARTE BIS E1345 & E1354
F453 = AUS
A1354 = AUS 关闭寻参
F489 = EIN
t10 ( EIN ) = -10[1/10Sek]
WARTE BIS E1345 + T10 压机有准备就绪
F453 = T10
WARTE BIS E1345 压机有准备就绪
F453 = AUS
F489 = AUS
t10 ( EIN ) = -2[1/10Sek]
WARTE BIS T10 & !A1345 关闭故障复位
A1355 = AUS 关闭定位
t10 ( EIN ) = -20[1/10Sek]
WARTE BIS !E1355 + T10 定位取消
F453 = T10
WARTE BIS !E1355
F453 = AUS
A177 = AUS
-------------------------------
USER程序分析:
Tech_ CZ Typ =Servo Zange = Nr1 ProgNr = 21 Offset = 40 [1/10 mm] Weg = 60 [1/10 mm]PktNr_SPS = 1 EIN
P1 1〜伺服// 2〜气动
P2 = 1 ~CZ1 // 2 ~ CZ2
P3 = 程序号
P4 = 偏移量 默认可以是 30 (0-150)
P5 = 下模向下移动1 /10毫米(接合后下模自动返回,默认可以是 60)
P6 = 给PLC的进程点号
P7 = 启动USER
电子压机的开口限位的查找:
$SOFTP_END[7]=96.0
$SOFTN_END[7]=12.0
“Punkt schon geclincht”点已弯曲
IF(PAR6==$COUNT_I[I_Arbpkt_Nr]) AND NOT (PAR6==0)THEN
MLD(7,#QuitMsg); 点已弯曲
ENDIF
计数器32 与P6值不能重复
例,压接点:
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5[1/100s]P 压接点
1: FB PSPS = EIN
2: A23 = AUS
3: WARTE BIS !E16 & E23
4: Tech_ CZ Typ =Servo Zange = Nr1 ProgNr =21 Offset = 40 [1/10 mm] Weg = 60
[1/10 mm] PktNr_SPS = 1 EIN
使用钳号1 程序号21 Offset机器人定极臂压接距离4mm
Weg压接后离件6mm 进程号1
5: SPSMAKRO280 = E1348 E1348使用 压钳开始铆接
审核编辑 :李倩
-
IPTV技术及应用2008-10-27 0
-
[原创]天线技术 射频技术 微波技术 雷达技术行业最新资讯2009-06-03 0
-
无线充电技术主流技术2016-03-02 0
-
WiMAX技术的多天线技术有什么优势?2019-08-12 0
-
EDA技术的发展,EDA技术的基本设计方法有哪些?2021-04-21 0
-
调变技术与多任务技术有什么不同?2021-05-19 0
-
NFC技术和iBeacon技术的差异是什么?2021-05-21 0
-
RFID技术是什么?RFID技术有哪些典型应用?2021-05-25 0
-
什么是LONWORKS技术?LONWORKS的技术特点有哪些?2021-05-25 0
-
UWB技术的定义是什么?UWB技术有哪些特点?2021-05-27 0
-
LoRa技术与其他无线技术对比2021-07-27 0
-
封装技术与加密技术的相关资料推荐2022-01-25 0
-
KUKA工具之CZ电伺服铆钳ECKOLD技术2020-08-07 1771
-
一文详解CZ电伺服铆钳ECKOLD技术2020-09-27 2324
全部0条评论

快来发表一下你的评论吧 !
