
资料下载


DIY ULN2003电机驱动器
王超
分享资料个
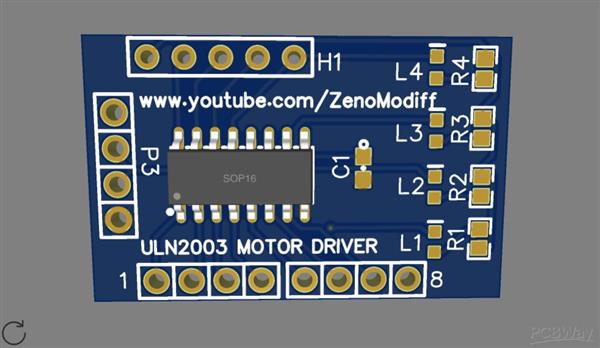
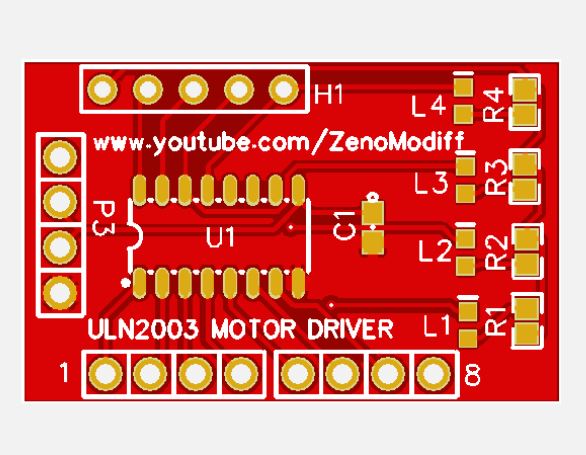
PCB图如下: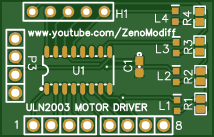
成分
|
ULN2003LVPWR 德州仪器 |
× 1 |
|
741C083510JP CTS电阻器产品 |
× 1 |
|
106CKR063M CDE/伊利诺伊电容器 |
× 1 |
|
SMBJ5.0CA SMC 二极管解决方案 |
× 1 |
| 16针公头 | × 1 |
|
C503B-RBS-CW0Z0AA2 科锐LED |
× 1 |
描述
DIY ULN2003电机驱动器
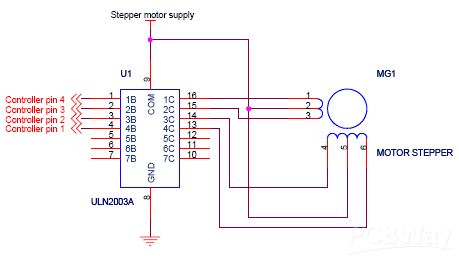
ULN2003驱动板
28BYJ-48 是您能找到的最便宜的步进电机之一。虽然它不是超级准确或功能强大,但它是用于小型项目或只想了解步进电机的绝佳电机。
该电机通常用于自动调节空调机组的叶片。它有一个内置的变速箱,可以提供一些额外的扭矩并大大降低速度。
您可以在下面找到本教程中使用的步进电机和驱动器的规格。
重要提示:制造商通常指定电机具有 64:1 的齿轮减速。Arduino william hill官网 的一些成员注意到这是不正确的,因此他们拆开一些电机来检查实际的齿轮比。他们确定确切的齿轮比实际上是 63.68395:1,这导致每整圈大约有 4076 步(在半步模式下)。
我不确定是否所有制造商都使用完全相同的变速箱,但您可以调整代码中每转的步数,以匹配您的型号。
Adafruit Industries 小型减速步进电机使用与 28BYJ-48 相同的外形尺寸,但具有不同的齿轮比。它有一个大约 1/16 的减速齿轮组,每转 513 步(在全步模式下)。您可以下载它的数据表
控制 28BYJ-48 步进电机的基本 Arduino 示例代码
您可以使用 Arduino IDE 将以下示例代码上传到您的 Arduino。
此示例使用 Stepper.h 库,该库应与 Arduino IDE 一起预装。此草图将步进电机沿一个方向转动 1 圈,暂停,然后沿另一个方向转动 1 圈。
// 包括 Arduino Stepper.h 库:
#include
// 定义每次旋转的步数:
常量 int stepsPerRevolution = 2048;
// 接线:
// ULN2003 驱动器上的引脚 8 到 IN1
// ULN2003 驱动器上的引脚 9 到 IN2
// ULN2003 驱动器上的引脚 10 到 IN3
// ULN2003 驱动器上的引脚 11 到 IN4
// 创建名为“myStepper”的步进器对象,注意引脚顺序:
步进器 myStepper = Stepper(stepsPerRevolution, 8, 10, 9, 11);
无效设置(){
// 将速度设置为 5 rpm:
myStepper.setSpeed(5);
// 以 9600 的波特率开始串行通信:
序列号.开始(9600);
}
无效循环(){
// 向一个方向旋转一圈:
Serial.println("顺时针");
myStepper.step(stepsPerRevolution);
延迟(500);
// 向另一个方向旋转一圈:
Serial.println("逆时针");
myStepper.step(-stepsPerRevolution);
延迟(500);
}
代码说明:
草图首先包含 Stepper.h Arduino 库。关于这个库的更多信息可以在 Arduino 网站上找到。
// 包括 Arduino Stepper.h 库:
#include
接下来,我定义了电机旋转 1 圈需要多少步。在本例中,我们将在全步模式下使用电机。这意味着旋转 360 度需要 2048 步(参见上面的电机规格)。
// 定义每次旋转的步数:
常量 int stepsPerRevolution = 2048;
接下来,您需要创建 Stepper 类的新实例,它表示连接到 Arduino 的特定步进电机。为此,我们使用函数
步进器(步骤,pin1,pin2,pin3,pin4)
其中steps是每转的步数,pin1到pin4是电机连接的引脚。要获得正确的步进顺序,我们需要按以下顺序设置引脚:8、10、9、11。
// 创建名为“myStepper”的步进器对象,注意引脚顺序:
步进器 myStepper = Stepper(stepsPerRevolution, 8, 10, 9, 11);
在这种情况下,我将步进电机称为“myStepper”,但您也可以使用其他名称,例如“z_motor”或“liftmotor”等。
步进电机 = Stepper(stepsPerRevolution, 8, 10, 9, 11);
. 您可以创建多个具有不同名称和引脚的步进电机对象。这使您可以轻松地同时控制 2 个或更多步进电机。
在设置中,您可以使用功能以 rpm 为单位设置速度
设定转速(rpm)
. 28byj-48 步进电机的最大速度在 5 V 时约为 10-15 rpm。
无效设置(){
// 将速度设置为 5 rpm:
myStepper.setSpeed(5);
// 以 9600 的波特率开始串行通信:
序列号.开始(9600);
}
在代码的循环部分,我们简单地调用
步骤(步骤)
以由电机确定的速度将电机转动特定步数的功能
设定转速(rpm)
功能。将负数传递给此函数会反转电机的旋转方向。
无效循环(){
// 向一个方向旋转一圈:
Serial.println("顺时针");
myStepper.step(stepsPerRevolution);
延迟(500);
// 向另一个方向旋转一圈:
Serial.println("逆时针");
myStepper.step(-stepsPerRevolution);
延迟(500);
}
带有 Arduino 和 AccelStepper 库的 28BYJ-48 步进电机的示例代码
在以下三个示例中,我将向您展示如何控制步进电机的速度、方向和步数。在这些示例中,我将使用 AccelStepper 库。
Mike McCauley 编写的 AccelStepper 库是一个非常棒的库,可用于您的项目。优点之一是它支持加速和减速,但它也有很多其他不错的功能。
你可以下载这个库的最新版本 AccelStepper-1.59.zip
您可以通过转到 Arduino IDE 中的 Sketch > Include Library > Add .ZIP Library... 来安装库。
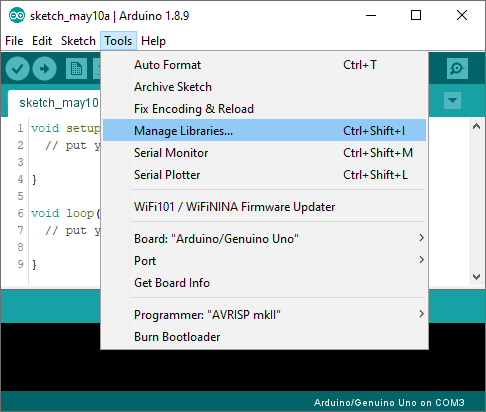
另一种选择是导航到工具 > 管理库...或在 Windows 上键入 Ctrl + Shift + I。库管理器将打开并更新已安装库的列表。
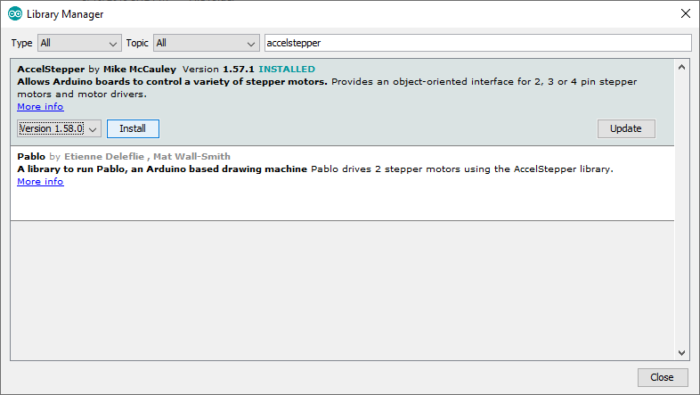
您可以搜索“accelstepper”并查找 Mike McCauley 的库。选择最新版本,然后单击安装。
1.连续旋转示例代码
以下草图可用于以恒定速度连续运行一个或多个步进电机。(不使用加速或减速)。
您可以通过单击代码字段右上角的按钮来复制代码。
/* 使用 ULN2003 驱动板、AccelStepper 和 Arduino UNO 控制 28BYJ-48 步进电机的示例草图:连续旋转。更多信息:https://www.makerguides.com */
// 包含 AccelStepper 库:
#include
// 电机引脚定义:
#define motorPin1 8 // ULN2003 驱动器上的 IN1
#define motorPin2 9 // ULN2003 驱动器上的 IN2
#define motorPin3 10 // ULN2003 驱动器上的 IN3
#define motorPin4 11 // ULN2003 驱动器上的 IN4
// 定义AccelStepper接口类型;半步模式下的 4 线电机:
#define MotorInterfaceType 8
// 使用引脚序列 IN1-IN3-IN2-IN4 进行初始化,以便将 AccelStepper 库与 28BYJ-48 步进电机一起使用:
AccelStepper stepper = AccelStepper(MotorInterfaceType, motorPin1, motorPin3, motorPin2, motorPin4);
无效设置(){
// 设置每秒最大步数:
stepper.setMaxSpeed(1000);
}
无效循环(){
// 以每秒步数为单位设置电机的速度:
stepper.setSpeed(500);
// 以 setSpeed() 设置的恒定速度步进电机:
stepper.runSpeed();
}
代码如何工作:
同样,第一步是将库包含在
#include
.
// 包含 AccelStepper 库:
#include
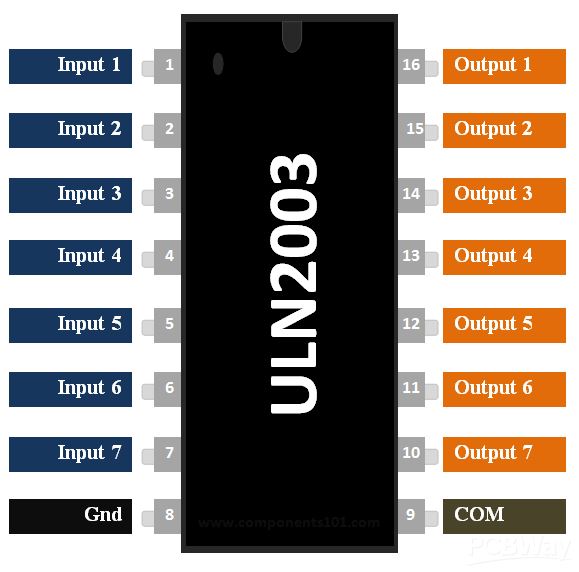
下一步是定义 ULN2003 到 Arduino 的连接。
该声明
#定义
用于为常量值命名。编译程序时,编译器会将对该常量的任何引用替换为定义的值。所以你提到的任何地方
电机引脚1
,编译器会在编译程序时将其替换为值 8。
// 电机引脚定义:
#define motorPin1 8 // ULN2003 驱动器上的 IN1
#define motorPin2 9 // ULN2003 驱动器上的 IN2
#define motorPin3 10 // ULN2003 驱动器上的 IN3
#define motorPin4 11 // ULN2003 驱动器上的 IN4
下一步是为 AccelStepper 库指定电机接口类型。在这种情况下,我们将以半步模式驱动 4 线步进电机,因此我们将接口类型设置为“8”。您可以在此处找到其他接口类型。如果您想以全步模式(每转少步)运行电机,只需将 8 更改为 4。
// 定义AccelStepper接口类型;半步模式下的 4 线电机:
#define MotorInterfaceType 8
接下来,您需要使用适当的电机接口类型和连接创建 AccelStepper 类的新实例。为了获得正确的步进顺序,我们需要按以下顺序设置引脚:motorPin1、motorPin3、motorPin2、motorPin4。
在这种情况下,我将步进电机称为“步进器”,但您也可以使用其他名称,例如“z_motor”或“liftmotor”等。
AccelStepper liftmotor = AccelStepper(MotorInterfaceType, motorPin1, motorPin3, motorPin2, motorPin4);
. 您可以创建多个具有不同名称和引脚的步进电机对象。这使您可以轻松地同时控制 2 个或更多步进电机。
// 使用引脚序列 IN1-IN3-IN2-IN4 进行初始化,以便将 AccelStepper 库与 28BYJ-48 步进电机一起使用:
AccelStepper stepper = AccelStepper(MotorInterfaceType, motorPin1, motorPin3, motorPin2, motorPin4);
在代码的设置部分,我们使用函数定义最大速度(步/秒)
设置最大速度()
. 每秒超过 1000 步的速度可能不可靠,因此我将其设置为最大值。请注意,我指定了步进电机的名称('stepper'),我想为其定义最大速度。如果您连接了多个步进电机,您可以为每个电机指定不同的速度:
stepper2.setMaxSpeed(500);
.
无效设置(){
// 设置每秒最大步数:
stepper.setMaxSpeed(1000);
}
在循环中,我们首先使用函数设置我们希望电机运行的速度
设置速度()
. (您也可以将其放在代码的设置部分中)。
stepper.runSpeed()
轮询电机,当一个步骤到期时,它执行 1 个步骤。这取决于设置的速度和自上一步以来的时间。如果要改变电机的方向,可以设置负转速:
stepper.setSpeed(-400);
以另一种方式转动电机。
无效循环(){
// 以每秒步数为单位设置电机的速度:
stepper.setSpeed(500);
// 以 setSpeed() 设置的恒定速度步进电机:
stepper.runSpeed();
}
在半步模式下,一转需要 4096 步,因此 500 步/秒导致大约 7 rpm。
2.草图控制步数或转数
使用以下草图,您可以控制速度、方向和步数/转数。
在这种情况下,步进电机以 500 步/秒顺时针旋转 1 圈,然后以 1000 步/秒逆时针旋转 1 圈,最后以 1000 步/秒顺时针旋转 2 圈。
/* 使用 ULN2003 驱动板、AccelStepper 和 Arduino UNO 控制 28BYJ-48 步进电机的示例草图:步数/转数。更多信息:https://www.makerguides.com */
// 包含 AccelStepper 库:
#include
// 电机引脚定义:
#define motorPin1 8 // ULN2003 驱动器上的 IN1
#define motorPin2 9 // ULN2003 驱动器上的 IN2
#define motorPin3 10 // ULN2003 驱动器上的 IN3
#define motorPin4 11 // ULN2003 驱动器上的 IN4
// 定义AccelStepper接口类型;半步模式下的 4 线电机:
#define MotorInterfaceType 8
// 使用引脚序列 IN1-IN3-IN2-IN4 进行初始化,以便将 AccelStepper 库与 28BYJ-48 步进电机一起使用:
AccelStepper stepper = AccelStepper(MotorInterfaceType, motorPin1, motorPin3, motorPin2, motorPin4);
无效设置(){
// 设置每秒最大步数:
stepper.setMaxSpeed(1000);
}
无效循环(){
// 将当前位置设置为 0:
stepper.setCurrentPosition(0);
// 以 500 步/秒的速度向前运行电机,直到电机达到 4096 步(1 转):
而(stepper.currentPosition()!= 4096){
stepper.setSpeed(500);
stepper.runSpeed();
}
延迟(1000);
// 将位置重置为 0:
stepper.setCurrentPosition(0);
// 以 1000 步/秒的速度向后运行电机,直到电机达到 -4096 步(1 转):
而(stepper.currentPosition()!= -4096){
stepper.setSpeed(-1000);
stepper.runSpeed();
}
延迟(1000);
// 将位置重置为 0:
stepper.setCurrentPosition(0);
// 以 1000 步/秒的速度向前运行电机,直到电机达到 8192 步(2 转):
而(stepper.currentPosition()!= 8192){
stepper.setSpeed(1000);
stepper.runSpeed();
}
延迟(3000);
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




