

HoverGames 无人机套件增强创造力
军用/航空电子
描述
HoverGames 无人机套件是一个模块化且灵活的恩智浦开发平台,用于构建从无人机和漫游车到无人驾驶飞行器 (UAV) 的自动驾驶汽车。这个想法是与 NXP HoverGames 活动合作产生的:一项针对各种应用优化无人机的编码挑战。凭借耐心、创造力和毅力,编码人员、开发人员和创新者可以创造性地解决问题。作为套件的一部分,参与者会收到一个完整的参考无人机,其中包括飞行管理单元 (FMU)。
每个 NXP HoverGames 硬件和模拟编码挑战都需要几个月的时间。参与者必须以折扣价购买该套件,然后才能玩得开心。最初,HoverGames 专员会要求通过简单的教程示例来熟悉无人机。然后参与者可以报名参加当前活跃的任何虚拟软件挑战(需要一些资格)。
该开发平台具有典型的信用卡大小,对机器人、控制算法、安全网络和通信协议的开发完全开放,并且可能包括额外的支持组件。
“我们将无人机构建为一个开发工具包,这正是每个想要使用它的人的意图。然后我们想,我们如何才能帮助更多的人参与到软件生态系统中来?所以我们从去年开始使用 HoverGames 计划。我们定义了一个社交主题:- 用传单灭火。这是以任何方式帮助急救人员的挑战,也是软件编码的挑战。这不是一场飞行比赛”,恩智浦系统创新无人机项目负责人 Iain Galloway 说。
无人驾驶飞行器 (UAV)
无人驾驶飞行器 (UAV) 承诺为我们周围的世界带来新的视角,并有可能去往曾经不可能的地方。自上世纪初以来,技术不断发展,在过去十年中取得了非凡的增长。过去,无人机只能用于军事目的;然而,在过去的十年里,这种设备已经变得很容易被普通人和各种公司所使用。
作为紧急情况或灾难现场急救箱的一部分,无人机的使用也越来越广泛。无人机是连接设备,与任何此类设备一样,也会出现数据安全风险。主要问题是这些工具在网络犯罪被认为是真正的威胁之前就已经存在。
NXP HoverGames 无人机开发套件
该开发套件基于带有 Linux 和 Open CV 的微处理器以及用于引导飞行的各种随附传感器。
“对于 HoverGames 1,我们拥有 KIT-HGDRONEK66,其中包括运行 NUTTX RTOS 和 PX4 飞行堆栈的 FMUK66 实时 MCU 飞行控制器。它包括用于创建 IMU(惯性测量单元)和 CAN、2 线汽车以太网和安全接口的所有传感器。在挑战 2 中,我们将引入名为 8MMNavQ(或 NavQ)的单独配套计算机。这款 Linux 配套计算机使用 NXP i.MX 8 M Mini 片上系统,包括用于视频编码的硬件加速器,并支持 Linux,包括 OpenCV 机器视觉、ROS、Python、MAVSDK 和其他所需工具”,Iain Galloway 说.
飞行控制器确保无人机保持稳定。该板以开源形式提供,可以插入其他外部传感器以根据功能优化操作。
锂聚合物电池和特定国家/地区的遥测无线电必须使用物联网连接之一。要获得该套件的全部功能,您需要选择购买两个可用的遥测无线电中的哪一个。通过遥测,您可以在飞行过程中与车辆实时连接,并在飞行过程中查看无人机的状态、加载和控制自主航路点,并进行任何必要的更改。遥测数据被发送到控制站,但也存储在飞行单元中。
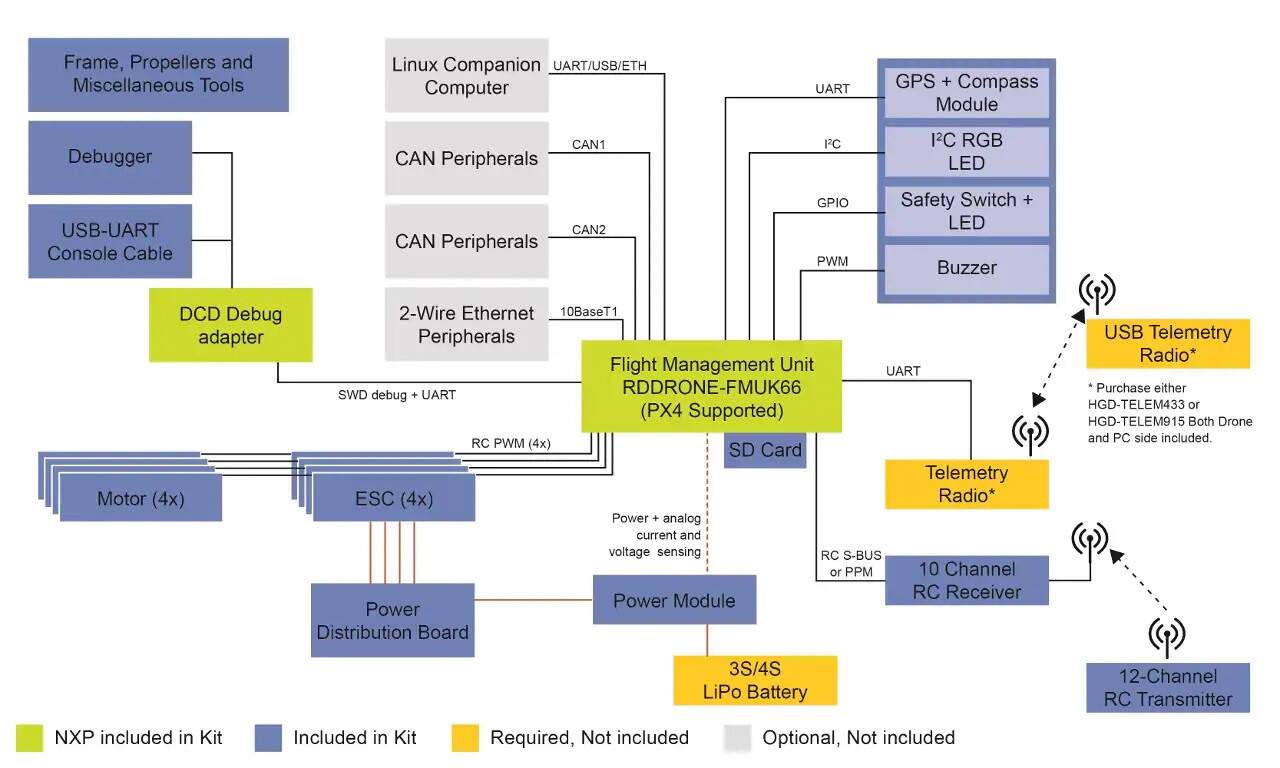
图 1:KIT-HGDRONEK66 套件框图
图 2:KIT-HGDRONEK66 的套件组件
RDDRONE-FMUK66 飞行单元 (FMU) 由商业友好的开源 PX4.org 飞行堆栈支持,具有 BLDC 电机控制能力。PX4 用于研究和商业无人机平台。其宽松的 BSD 许可证保留了包含专有 IP 的能力。此参考设计使您可以自由地开发您的机器人车辆。此外,FMU 用途广泛,可以运行其他开源或专有飞行堆栈,包括 GPS 和其他用于自主导航到任务航路点的定位输入。QGroundControl 地面站软件也支持该套件,该软件可作为桌面程序和适用于安卓和 iPhone 的移动应用程序使用。
RDDRONE-FMUK66 在 NXP Kinetis K66 微控制器上运行 NuttX RTOS,具有 180 MHz 的 ARM Cortex-M4 内核和 2 MB 闪存。它使用 NXP 传感器、汽车CAN总线收发器以及新型两线汽车 100BASE-T1 以太网收发器 TJA110x。
HoverGames 无人机开发套件组件还包括 DC-DC 电源模块、带支架的 GPS NEO-M8N 模块、安全开关、蜂鸣器和明亮的 RGB 状态 LED、SEGGER J-Link EDU Mini / FTDI USB-TTL-3V3 电缆 /调试带电缆的分线板、BLDC 无刷电机 2212 920 kV、ESC 电机控制器 40 A OPTO。
图 3:RDDRONE-FMUK66 飞行单元 – 俯视图
图 4:RDDRONE-FMUK66 飞行单元 – 底视图
组装后,该套件可为其他组件提供额外空间,例如快速物联网适配器或支持计算机,例如新的 NavQ i.MX 8M Mini,用作 Linux、OpenCV 和 ROS 的视觉处理器。
“我认为这个解决方案最重要的部分之一是它是完全开放的。所以其他无人机和公司会为你提供无人机,但他们只会为你提供基于 API 的软件开发工具包。你没有控制权。你不知道引擎盖下发生了什么。在我们的项目中,无论是飞行控制器还是外部计算机,都是开源的硬件和软件。因此,您实际上可以使用此工具并最终将其转变为业务或产品,”Iain 说。
开发工具包售价 450 美元,在各种悬停游戏程序中向开发人员提供各种折扣。
无人机的许多挑战涉及控制或编程无人机。HoverGames 希望鼓励参与者编写代码来改进或激活他们车辆的新功能,以及有趣的软件赛车挑战。PX4 Slack 社区、GitHub 和 GitBook 平台支持以社区的形式分享意见,并获得 NXP 的支持。
参与者将必须设计解决方案来解决社会问题或社会面临的一些最大挑战。例如,这些领域包括模拟废物清理,或监测濒危动物物种的迁徙模式,或灾害管理、健康危机、环境保护、野生动物保护等。
审核编辑 黄昊宇
- 相关推荐
- 无人机
-
STM32----释放您的创造力2012-07-06 0
-
STM32释放您的创造力2012-08-03 0
-
小米无人机要PK大疆无人机,你看好吗?2015-09-14 0
-
无人机还可以植保?带你见识下神奇的无人机2016-02-26 0
-
都在谈论无人机:教你10种利用无人机赚钱的方法2017-02-17 0
-
无人机侦测和反制系统2017-04-05 0
-
无人机2017-06-07 0
-
无人机遥控方向控制问题2018-05-10 0
-
无人机中的MCU是如何工作的?2018-10-09 0
-
无人机流行和快速增长背后,对无人机开发平台了解多少?2019-02-21 0
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 0
-
仿生无人机能增强无人机的环境适应性 是未来无人机研发的重要方向2019-11-25 1476
-
大疆教育推出编程无人机RoboMaster TT创造力套装2020-08-26 2951
-
大疆推出无人机教育平台RoboTT,打造专业无人机与AI教育解决方案2020-08-27 1857
-
NXP Semiconductors HoverGames无人机系统解决方案2024-04-18 3357
全部0条评论

快来发表一下你的评论吧 !
