

无人机电子速度控制器的设计注意事项
军用/航空电子
描述
无人机的应用范围不断扩大,应用范围从业余爱好者到商业和工业领域,再到最先进的军事应用。无人机的优势在于可以远程操作,因此可以飞越难以亲自到达的地区,危险或不方便。商业领域的应用是多方面的:农业、植物和建筑物的监控、拍摄区域,甚至包裹、药品或必需品的运送。未来几年,无人机的新应用和进一步应用很可能会被确定,届时它们将不再仅被视为玩具或小工具,而是提高我们生活质量的宝贵工具。
电子调速
本文重点介绍中高程无人机,通常配备无刷直流电机。这种类型的电机需要仔细和连续地调节速度和相对旋转方向;在某些情况下,还需要实现真正的动态制动。负责这些功能的威廉希尔官方网站 是ESC(Electronic Speed Controller),它通常由电源级、电流检测威廉希尔官方网站 、微控制器和与飞行控制器的通信接口组成(图1)。电调的设计涉及一系列重要特征,涉及:
用于电机控制的拓扑结构;
成本和效率之间的折衷(因此飞行时间);
无人机上安装的电池类型;
所需的性能(例如,最大可控电机速度);
电磁兼容性 (EMC) 和抗干扰能力。
图 1:无人机框图
有两种类型的无刷电机适用于无人机:直流无刷电机 (BLDC) 和交流无刷电机 (BLAC),也称为永磁同步电机 (PMSM)。选择使用哪种类型的电机通常基于所选的控制算法:梯形或磁场定向控制 (FOC)。更准确地说,梯形电机控制算法具有以下特点:
基于六步换向序列的电机控制;
转子磁角检测,以正确的角度进行换向(每步对应60度角);
在没有传感器的情况下,换向角是通过测量相电压反电动势来估计的。
相反,FOC 控制算法具有以下特点:
通过正弦相电压或电流 (FOC) 控制电机;
转子磁场角度检测精度在1-5度之间,始终保证最大扭矩;
在没有传感器的情况下,转子磁角是根据电机的相电压和电流估算的。
与基于机械速度传感器的替代方案相比,无传感器控制系统通常是首选,因为它可以降低项目成本并有助于提高系统的稳健性。
设计注意事项
用于在不同功率级之间换向的PWM 信号根据选择的控制类型而变化。图 2显示了去除 PWM 载波后获得的滤波相电压,参考梯形和正弦电机控制技术的情况。
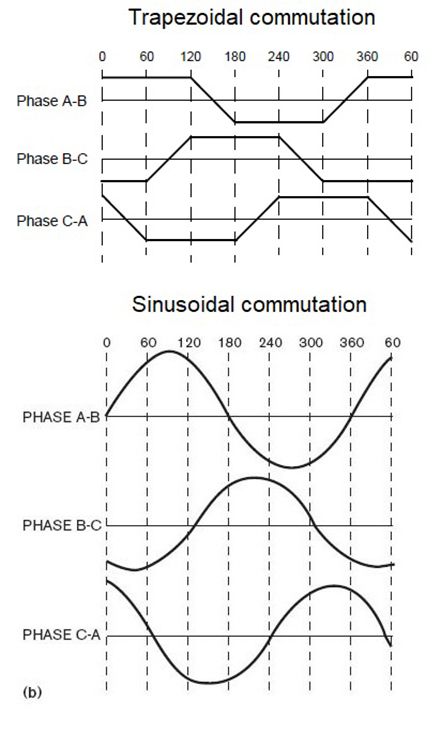
图 2:用于梯形和正弦换向的波形比较
梯形控制受到一个问题(问题)的影响,由于每相之间的突然变化,这会产生转矩脉动和电流尖峰,降低效率并产生振动。在电气层面,电调的直流母线电压在7.4V到22.4V之间,而锂聚合物电池(LiPo)的电流在10A到20A之间。为了尽量减少干扰,用于相间换向的 PWM 频率在 30kHz 到 60kHz 之间。一旦选择了控制算法,就必须决定控制是开环还是闭环。
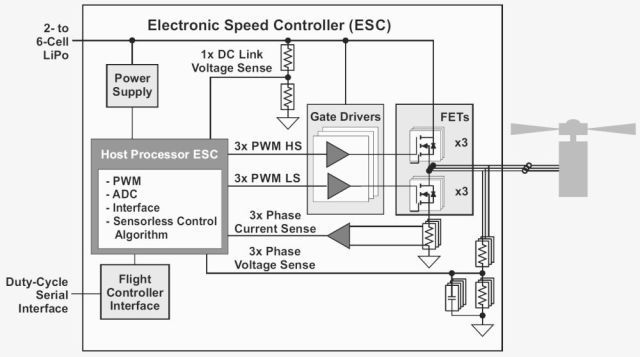
图 3:具有无传感器控制的无刷电机的 ESC
闭环控制是优选的,因为通过测量使电机执行所需位移所需的电流,相对于开环解决方案获得更高的效率和精度。在梯形控制的情况下,只需要测量一个分流电流,而在正弦控制的情况下,最多需要测量三个分流电流(图 3)。使用闭环控制时,需要对算法进行调整,以便电机在高转速(即超过 12kRPM)下保持稳定。
商用无人机解决方案
无人机电调的设计需要高品质的组件,专为以最大速度驱动高速电机而设计。德州仪器 (TI) 开发了一个名为 InstaSPIN 的 MCU 系列,它使设计三相电机控制应用程序变得更加容易。InstaSPIN-FOC 适用于无传感器系统,具有快速软件编码器,可对任何三相电机进行扭矩和速度控制。InstaSPIN-MOTION 而是针对传感器系统,并为任何三相电机提供位置、速度和扭矩控制。除了 MCU,TI 还提供其他适用于 ESC 设计的产品,例如 NexFET 系列功率 MOSFET 和具有三个集成分流放大器的 DRV8305 三相栅极驱动器。
InstaSPIN 附带一个高压电机控制套件,这是一个完整的参考设计,用于学习和试验高压电机的数字控制。该平台基于革命性的InstaSPIN-FOC和 InstaSPIN-MOTION 电机控制技术,包括一个 TI C2000 InstaSPIN 32 位微控制器(图 4)。它允许开发人员快速识别、自动调整和控制三相电机,从而快速提供稳定且功能强大的电机控制系统。该套件是一款出色的全方位电机逆变器设计工具,展示了对最常见类型的高压三相电机的无传感器和基于编码器的控制,包括交流感应 (ACI)、无刷直流 (BLDC) 和永磁体同步电机(PMSM 和 IPM)。
STMicroelectronics 还提供完整的电子速度控制器 (ESC) 参考设计,实现无传感器 FOC 算法。STEVAL-ESC001V1 电子速度控制器参考设计适用于入门级商用无人机设计,可驱动任何由 6S LiPo 电池组或任何等效直流电源供电的三相无刷(或 PMSM)电机,峰值电流高达 30 A . 该STEVAL-ESC001V1借助完整的预配置固件包 (STSW-ESC001V1),设计人员可以快速开发他们的应用,实现具有 3 分流电流读数、速度控制和完全主动制动的无传感器磁场定向控制算法。参考设计板可以通过 PWM 信号接受来自飞行控制器的命令,但也可以使用其他通信接口,如 UART、CAN 和 I²C。
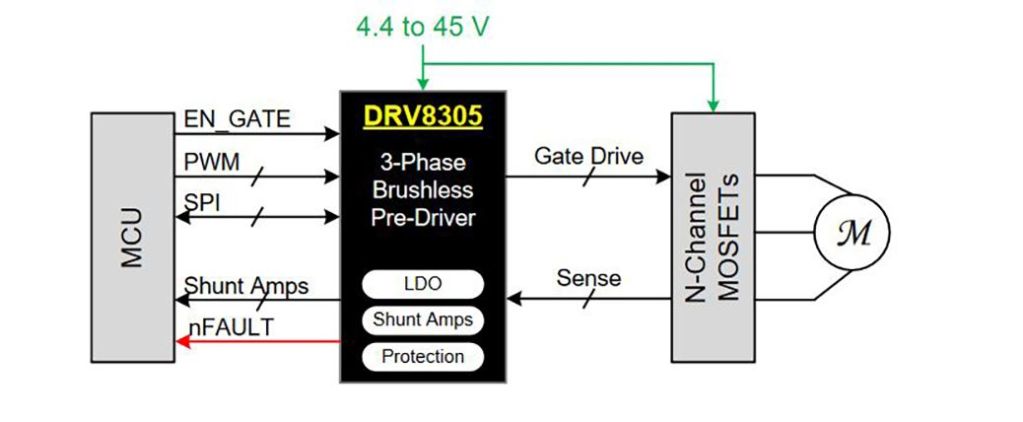
图 4:DRV8305 的简化威廉希尔官方网站
该参考包括一个工作电压为 5V 的电池消除器威廉希尔官方网站 、一个用于温度测量的 NTC 传感器以及用于过流和过压保护 (OCP/OVP) 的威廉希尔官方网站 。小尺寸和电流能力使该参考设计适用于专业无人机等小型轻型无人机上的电子速度控制器。STSW-ESC001V1 固件/软件包加上 STM32 PMSM FOC 软件开发套件 – MC 库允许通过对嵌入在 STM32 MCU 中的磁场定向控制参数起作用来优化电子速度控制器设计,并利用 ST 电机轮廓仪检索相关电机参数迅速。ST 无传感器 FOC 算法适用于任何三相 BLDC 或 PMSM 电机应用,确保更长的飞行时间和最佳动态性能。
结论
无人机的电子速度控制器对于中小型商用无人机的电机速度控制至关重要。最广泛使用的解决方案之一是基于用于控制三相无刷电机的无传感器 FOC 技术。对于可实现更高精度和更好速度控制器的有传感器解决方案,无传感器解决方案具有成本更低和重量更轻的优势,这是任何中小型无人机的两个关键因素。
-
无人机的时代离我们还有多远?2019-03-15 0
-
无人机电子威廉希尔官方网站 设计图最新集锦2015-04-24 0
-
无人机主从式姿态同步控制器设计与仿真2017-04-27 0
-
无人机电池使用前后注意事项有哪些?2017-09-19 0
-
无人机流行和快速增长背后,对无人机开发平台了解多少?2019-02-21 0
-
德州仪器全新参考设计改善无人机飞行时间和电池寿命2019-03-26 0
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 0
-
无人机飞行控制器威廉希尔官方网站 该怎么设计?2019-10-22 0
-
有刷电机无人机飞行控制器2022-08-08 0
-
植保无人机的飞行注意事项2020-05-15 1636
-
不同天气中无人机起飞前的注意事项2020-05-28 2686
-
无人机电子速度控制器的设计注意事项2021-05-20 6692
-
无人机电子速度控制器(ESC)参考设计2022-04-02 2184
-
为无人机设计电子速度控制器2022-07-21 1078
-
UM2516_无人机电子速度控制器发现工具包2022-11-22 295
全部0条评论

快来发表一下你的评论吧 !
