

基于CAN总线进行网络管理与Transceiver的关系梳理
接口/总线/驱动
描述
前言
在汽车行业CAN总线是应用场景最多的情况,本文也基于CAN总线进行网络管理与Transceiver/Controller关系梳理。
AUTOSAR NM涉及到的模块包括Transceiver、CAN Driver、CANIf、CANSM、CANNM、PDUR、Com、ComM、EcuM、BswM等。由于模块众多,小编会分多篇梳理。
本篇就网络管理和Transceiver、Controler关系理一理。
网络管理和Transceiver
为什么要谈Transceiver?因为任何上层意图的执行实际都是对底层硬件模块的操作,网络管理也不例外。
在讨论网络管理之前,问一个问题,ECU如何供电的?因为只有ECU上电并且程序运行以后才有网络管理。所以不要混淆ECU上电和网络管理激活,ECU上电并不等于网络管理激活。本例以Transceiver1145(1)为例说一下ECU如何上电。
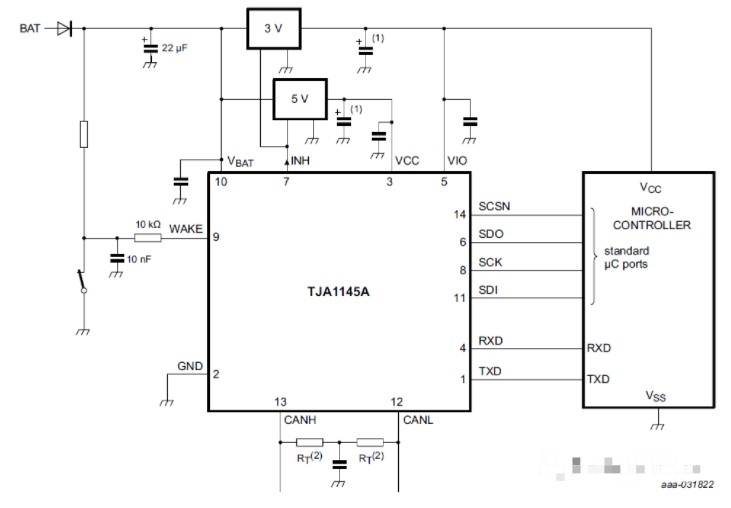
如上图,当BAT(等价于KL30,本例不用KL15)给Transceiver1145供电后,Transceiver1145的INH引脚激活3V电源管理模块,进而给主芯片供电,当主芯片供电以后,程序开始运行,但此时网络处于BSM(Bus Sleep Mode),ECU并不能立马外发报文,需要对唤醒事件进行有效性验证,避免因总线抖动或者其他干扰造成的ECU无效唤醒。
如果程序(上层模块,如CANNM)想要识别当前是否收到网络管理报文应该具备什么条件?
如果ECU想正常的收发报文需要Transceiver1145和Controller进入各自的工作状态。先说Transceiver1145,对于Transceiver1145需要切换到Normal Mode(通过SPI发送Normal指令),此时Transceiver1145才能将模拟信号和数字信号进行转换;虽然Transceiver1145可以将模拟信号和数字信号进行转换,但是此时ECU还不能将报文传输给上层模块,即此时还不能正常的收发报文,因为Controller没有正常工作,只有当Controller也正常工作以后,ECU才能正常的收发报文。
网络管理和Controller
Controller如何进入正常的工作模式呢?Controller进入到正常的工作模式就需要了解ECU的唤醒过程。本例以Transceiver唤醒检查为例分析ECU唤醒流程。
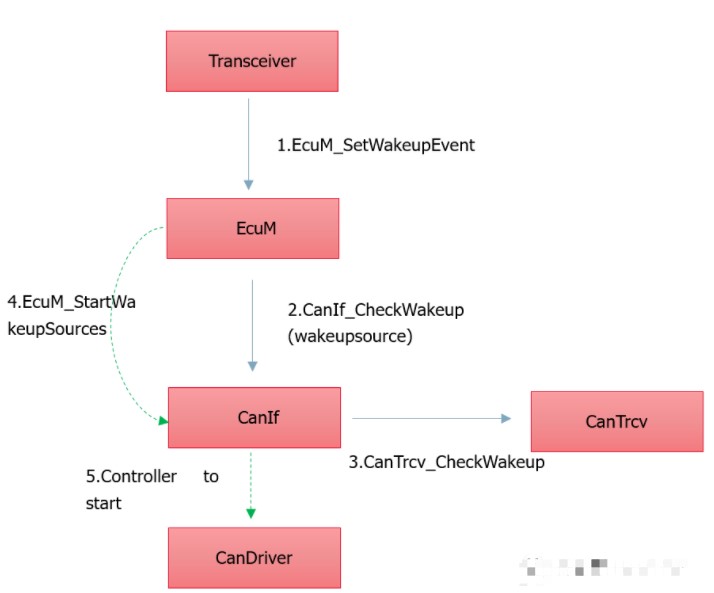
如上图,Transceiver1145在初始化或者handler程序中检查唤醒源,判断到上电或者CAN总线干扰事件时会通知EcuM有唤醒事件,之后EcuM通过CanIf模块调用CanTrcv_CheckWakeup检查唤醒源。如果EcuM使能了唤醒源的检查,则EcuM调用EcuM_StartWakeupSources接口,该操作的实质是使得Controller进入Start状态,至此Transceiver1145和Controller均进入了对应的工作状态,ECU具备了收发报文的能力。注意,Controller需要从STOPPED状态切换到STARTED状态。
审核编辑:刘清
-
CAN通过模拟开关进行CAN1和CAN2总线的切换,接入总线后导致整个CAN网络崩溃怎么解决?2024-08-16 0
-
例举CAN总线网络应用2011-06-22 1810
-
CAN、LIN总线在车载网络中的应用2011-06-09 1001
-
基于CAN总线的雷达网络测控系统设计2009-09-01 399
-
基于CAN总线的磁悬浮列车通信网络研究2011-07-22 937
-
CAN总线是什么?CAN总线数据链路层又是什么?2018-07-11 13155
-
浅谈局部网络管理 基于CAN总线的局部网络管理机制设计2018-04-12 7024
-
如何使用CAN总线中继模块进行CAN总线节点扩容的实现案例概述2018-12-23 6826
-
CAN转ETHERCAT网关将CAN总线和ETHERCAT网络连接方法2023-07-06 921
-
CAN转ETHERCAT网关将CAN 总线和 ETHERCAT 网络连接方法2023-10-31 790
-
can总线负载率多少合理2023-09-07 3918
-
一文解析AUTOSAR CAN网络管理2023-09-09 5776
-
汽车CAN总线系统的挑战与设计2023-11-03 1164
-
CAN/CAN FD/CAN XL三大总线协议解读,是逐步替代关系吗?2024-08-12 4392
-
【CAN总线知识】全面了解CAN总线协议2024-10-15 1445
全部0条评论

快来发表一下你的评论吧 !
