

基于MEMS的IMU设计开发应用
MEMS/传感技术
描述
基于 MEMS 的惯性测量装置 (IMU) 可定义为系统级封装。 它包括加速计机械感测元件、陀螺仪机械感测元件以及电子威廉希尔官方网站 (“大脑”),以便将加速度和角速度转换为可读格式。 MEMS IMU 的开发已达数十年,并且已经应用在特定利基市场。 但是,只有 MEMS 技术成熟到能够实现低成本、小规格设备的程度,这些 IMU 在各种应用中的实施规模才会急剧攀升。
虽然这些 IMU 的性能在要求不高的应用中可满足使用预期(如简单运动检测、计步和纵向/横向显示),但随着便携式、可穿戴和物联网 (IoT) 设备中传感器应用的出现,便迫切需要进一步提升性能并减少电流消耗。 最新一代的 MEMS IMU 满足这些需求。
在下面的文章中,我们将回顾 MEMS IMU 的最新进展,阐述这些进展如何帮助硬件和软件工程师缩短开发时间并克服他们一直面临的挑战。
现代 IMU 如何满足新兴应用的苛刻要求?
新兴 MEMS 基于传感器的应用要求非常苛刻。 这意味着现代 IMU 规格必须尽可能小、功耗尽可能少,同时提供高灵敏度、出色的精度、高分辨率和极低的噪声水平。 下图显示了极小 2.5 x 3 x 0.8 封装中的现代 IMU 的结构。
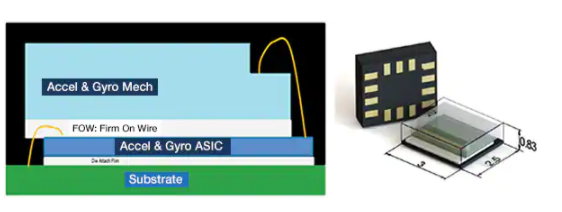
图 1: 现代 IMU 结构(系统级封装)规格: 2.5 x 3 x 0.86 mm,封装: LGA-14。
除了上述要求,最新 IMU 还提供了嵌入式算法帮助工程师缩短设计和开发时间。 表 1 重点介绍了现代 IMU 的主要参数和特性。
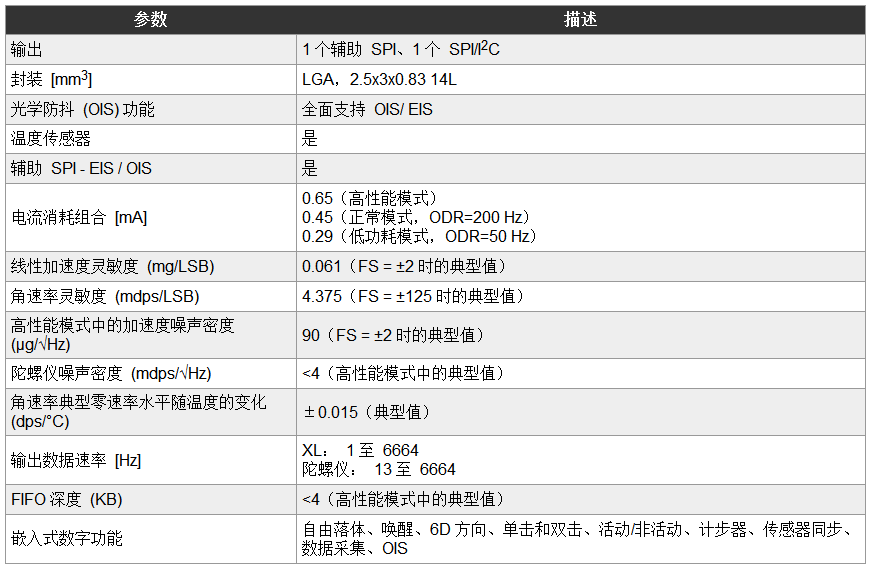
表 1: 现代 MEMS IMU 的主要规格;mdps:毫度/秒。
让我们回顾上表中的一些特性,从而说明这些特性如何帮助工程师在产品中设计 IMU 并更快地开发应用。
设备接口
两种接口(SPI 和 I2C)可为设计人员提供更大的灵活性来读取传感器数据。 此外,IMU 使用陀螺仪和加速计支持光学防抖 (OIS) 和电子稳像 (EIS) 应用。 因此,还有专用辅助 SPI 接口来输出 OIS 数据。
图像稳定: EIS 和 OIS
MEMS IMU 的一个重要进步就是其性能可适用于十分苛刻的 OIS 和 EIS 应用。 图 2a 和 2b 显示了 OIS 连接如何作用的原理图。
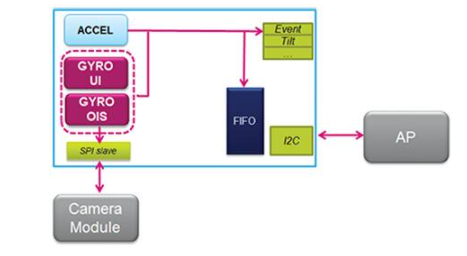
图 2a: OIS 数据通过专用 SPI 接口输出。
在图 2a 中,设备可通过专用 SPI 接口输出 OIS 数据。 它为 OIS 应用提供专用可配置信号处理路径。 用户界面 (UI) 信号处理路径完全独立于 OIS 部分,并且可通过设备内嵌的 FIFO 功能读取。
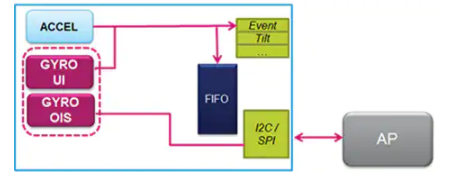
图 2b: OIS 数据直接或通过嵌入式 FIFO 发送到应用处理器。
图 2b 说明了 IMU 中可用的第二种方案。 OIS 应用的传感器数据可直接发送到系统板上的应用处理器 (AP)。 此外,也可以将数据保存在嵌入式 FIFO 中,然后从 FIFO 将整个数据集读取到 AP。
IMU 实现低噪声以改进苛刻应用中的精度
许多应用都要求噪声很低的传感器数据。 但是,下面两种应用属于目前最热门的应用,要求 IMU 噪声极低和零偏稳定性较高。
增强现实 (AR): 由于近期 MEMS IMU 的改进,AR 在便携式设备中的应用受到了极大关注。 AR 功能的实现方式是通过在真实的环境中叠加图形、音频和其他感应增强并实时显示出来,从而实现交互性和可操控性。
室内定位:在 GPS 数据访问能力下降或不可用而无法提供精确可靠定位的情况下,MEMS IMU 在实现室内定位中发挥着重要作用。 行人航位推算 (PDR) 是室内定位的主要基本要素,主要依赖传感器提供精确数据,以便能够计算新位置和方向。 IMU 的性能和精度对 PDR 解决方案的精度至关重要。
最新 IMU 通过提供极低噪声的陀螺仪和加速计解决了这一问题。 上面的表 1 描述了加速计和陀螺仪的低噪音水平。
嵌入式算法帮助缩短设计和开发时间
MEMS IMU 中的嵌入式特性消除了某些应用的代码开发需求。 这些特性将软件工程师从嵌入式应用代码编写工作中解放出来,这有助于缩短应用开发周期。 例如,计步器应用需要硬件和软件工程师花费数月甚至数年的时间来开发代码并进行测试。 但是,通过带嵌入式计步器算法的 MEMS IMU,可在很大程度上减少这些工作,工程师只需在设备寄存器中配置计步器应用相关的参数。
现代 MEMS IMU 的设计能够与 Android 完全兼容,同时具有下列片载功能:
事件检测中断(完全可配置)
IMU 提供事件检测中断,帮助工程师在无需开发代码的情况下实现一系列应用。 嵌入式事件检测中断包含下列内容:
自由落体:仅使用加速计数据。 如果全部三个轴上的加速度都低于预设阈值,则生成中断。
唤醒:当至少一个轴上的加速度超过预设的阈值时,就生成中断。
6D 和 4D 方向检测:仅使用加速计数据,同时能够检测空间中的设备方向,为手持设备轻松实现节能程序和自动图像旋转。 当设备从一个方向切换到另一个方向时,就生成中断。 要识别方向改变,需要满足下列条件:
一个轴高于阈值,两个轴低于阈值(已知区)。
已知区与之前的区不一样。
阈值可通过嵌入在 IMU 中的专用寄存器进行配置。
单击和双击:设备可配置为受到任意方向轻击(一次或两次)时在专用引脚上输出中断信号。 开发人员可配置双击识别的阈值和两个事件之间的时间。 单击和双击功能的建议输出数据速率 (ODR) 为 400 Hz 和 800 Hz。
唤醒至休眠:状态识别 ACTIVE/SLEEP(活动/睡眠,也称为活动/非活动)的变化。 用户设置 ODR 后,如果所有三个轴上的加速度数据在规定时间段内都低于指定阈值,设备进入“唤醒至休眠”模式(设备处于最低 ODR 12 Hz)。 设备处于休眠(非活动)模式且至少一个轴的加速度超过阈值时,设备将进入“休眠至唤醒”模式(也称为“唤醒”)。
所有这些功能都是并行的,并在 ODR 低于1600 Hz 的情况下正确运行。 每个事件都能生成一个可驱动至设备的两个中断引脚(INT1 和 INT2)的中断信号。
拥有极低功耗和高性能的特定 IP 块
为了进一步降低系统的总电流消耗和极大节省开发人员的开发时间,新 IMU 包含一些嵌入式 IP 块。 下面是两个广泛使用的功能:
计步器功能:步检测器和步计数器: 嵌入式计步器仅使用加速计数据。 该装置可在检测到脚步时生成中断。 它会计算步事件,最多可保存 65535 步(16 位)。 步数重置和算法重置相互独立。 最小阈值和工作满量程范围均可进行配置。
倾斜: 倾斜功能已在硬件中实现,仅使用加速计数据来达到超低功耗和稳健性目标。 所依据的工作原理是:设备倾斜程度每次发生变化时便会触发事件。 为了实现更定制化的用户体验,倾斜功能可通过以下方式配置:
事件的可编程平均窗口/持续时间。
生成中断事件的可编程角度阈值(默认 35°)。
设备激活至少两秒后,倾斜改变至少 35 度时,此事件就生成中断。 倾斜功能可用于不同场景。 例如,手机放在口袋中,当手机持有者从坐姿变为站立或从站立变为坐姿时,就会触发中断。 但是,手机放在口袋中走路、跑步或爬楼梯时不会触发中断。
IMU 作为传感器中枢
最新 IMU 的一个主要优势就是嵌入式传感器中枢功能。 IMU 提供硬件灵活性,可将具有不同模式连接的引脚连接到外部传感器,以便扩展 IMU 的功能。 传感器中枢可使用最多六个传感器:两个内部传感器(加速计和陀螺仪)和四个外部传感器。 下面的框图说明了 IMU 作为传感器中枢的情形。 IMU 提供一个主控 I2C 配置,用于连接到外部传感器并收集数据。 所收集的两个内部传感器数据可同时存储在嵌入式 FIFO 中。 两种方法可用于触发主控 I2C 从外部传感器收集数据:
与内部数据就绪信号同步(XL 或陀螺仪)。
与其中一个传感器的外部信号同步(专用 PAD)。
此传感器中枢功能的优势包括数据一致性、数据同步、更容易放置和布线,以及更低的总系统功耗。
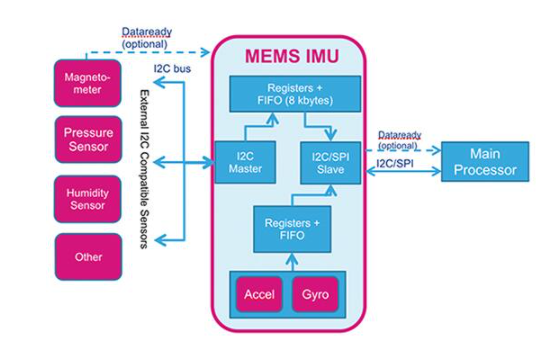
图 3: MEMS IMU 可用作传感器中枢,将多个传感器的数据发送到中央处理器。
总结
最新基于 MEMS 的 IMU 实现了重大改进,帮助系统设计人员和应用开发人员极大缩短了设计和开发时间。 这种 IMU 的价格已经下降了很多,但性能和嵌入式特性却得到了极大改进。 新式 IMU 可以让硬件和软件工程师想出更多新应用的点子。 下一代 MEMS IMU 将继续引进其他特性并改进性能,以满足系统工程师和应用开发人员日益增长的期望。
-
最新 MEMS 惯性模块如何帮助克服应用开发挑战2017-03-31 0
-
MEMS IMU/陀螺仪对准基础2018-10-17 0
-
MEMS技术缩短了其与FOG和其它传统惯性技术的性能差距2018-10-17 0
-
用于智能农业的精密MEMS IMU2018-06-01 4899
-
ADIS16505: Precision, Miniature MEMS IMU Data Sheet2021-01-31 605
-
ADIS16505:精密微型MEMS IMU数据表2021-03-23 710
-
ADIS16500:精密微型MEMS IMU数据表2021-04-14 600
-
ADIS16507:精密微型MEMS IMU数据表2021-04-19 570
-
ADIS16465:精密MEMS IMU模块数据表2021-05-09 574
-
ADIS16475:精密微型MEMS IMU数据表2021-05-12 571
-
ADIS16477:精密微型MEMS IMU数据表2021-05-13 540
-
iSensor MEMS惯性测量单元(IMU)手册2021-05-24 834
-
ADIS16467:精密MEMS IMU模块数据表2021-05-25 598
-
预测和管理MEMS陀螺仪中的关键噪声源2023-01-08 2238
全部0条评论

快来发表一下你的评论吧 !
