

 Linux驱动开发-编写NEC红外线协议解码驱动
Linux驱动开发-编写NEC红外线协议解码驱动
描述
【摘要】 NEC协议是众多红外线协议中的一种,以前广泛用在电视机,投影仪设备里,很早之前经常说的万能电视遥控器就是NEC协议的;当前文章就介绍如何在Linux下通过红外线接收模块,编写一个NEC协议的红外线解码驱动,解析遥控器传输过来的各种控制指令,完成对应的动作响应;驱动里用到了外部中断接收数据,通过定时器计算间隔时间完成解码。
1. 红外线知识点介绍
在光谱中波长自760nm至400um的电磁波称为红外线,它是一种不可见光。目前几乎所有的视频和音频设备都可以通过红外遥控的方式进行遥控,比如电视机、空调、影碟机等,都可以见到红外遥控的影子。这种技术应用广泛,相应的应用器件都十分廉价,因此红外遥控是我们日常设备控制的理想方式。
红外线遥控是目前使用最广泛的一种通信和遥控手段。由于红外线遥控装置具有体积小、功耗低、功能强、
成本低等特点,因而,继彩电、录像机之后,在录音机、音响设备、空凋机以及玩具等其它小型电器装置上也纷
纷采用红外线遥控。工业设备中,在高压、辐射、有毒气体、粉尘等环境下,采用红外线遥控不仅完全可靠而且
能有效地隔离电气干扰。
NEC协议是众多红外线协议中的一种,以前广泛用在电视机,投影仪设备里,很早之前经常说的万能电视遥控器就是NEC协议的。
当前文章就介绍如何在Linux下通过红外线接收模块,编写一个NEC协议的红外线解码驱动,解析遥控器传输过来的各种控制指令,完成对应的动作响应;驱动里用到了外部中断接收数据,通过定时器计算间隔时间完成解码。
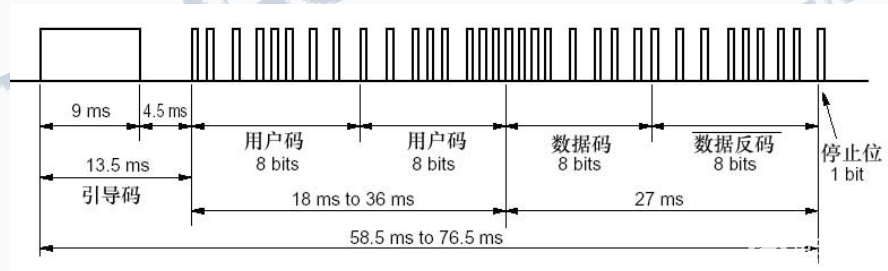
NEC协议的特点如下:
单个码一共分为5各部分(没有算重复码): 引导码+用户码+用户反码+按键码+按键反码
对于接收方_引导码: 9ms的低电平+4.5ms的高电平。
接收的数据是0: 560us低电平+560us高电平
接收的数据是1: 560us低电平+1680us高电平
2. 硬件环境
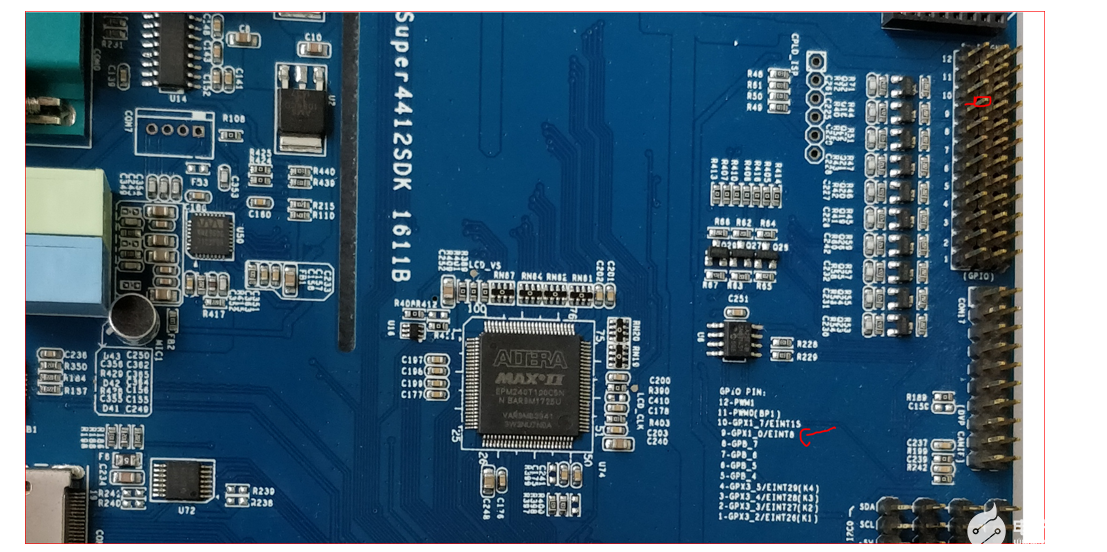
当前开发板采用友善之臂的Tiny4412,CPU是三星的EXYNOS4412,最高主频为1.5GHZ,Linux内核版本是3.5。
下面是红外线接收模块原理图:
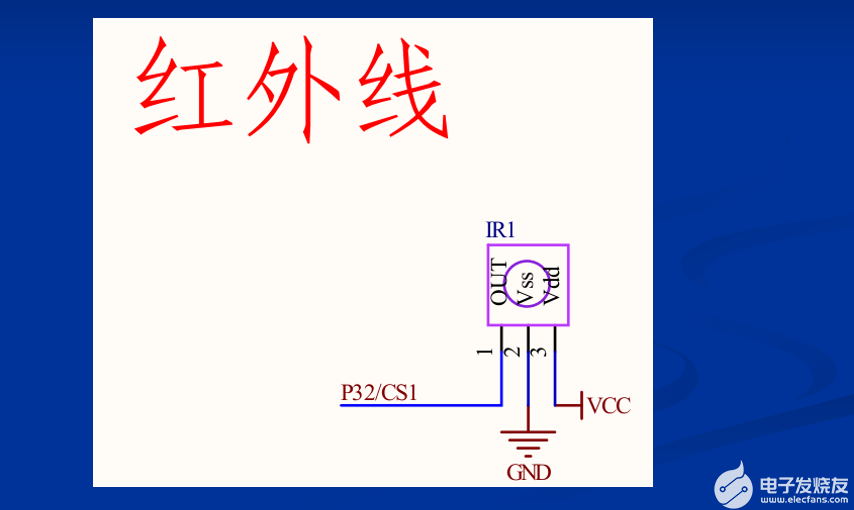
通过杜邦线接在开发板的中断输入脚上:(GPX1_0接口上,第9个排针。)
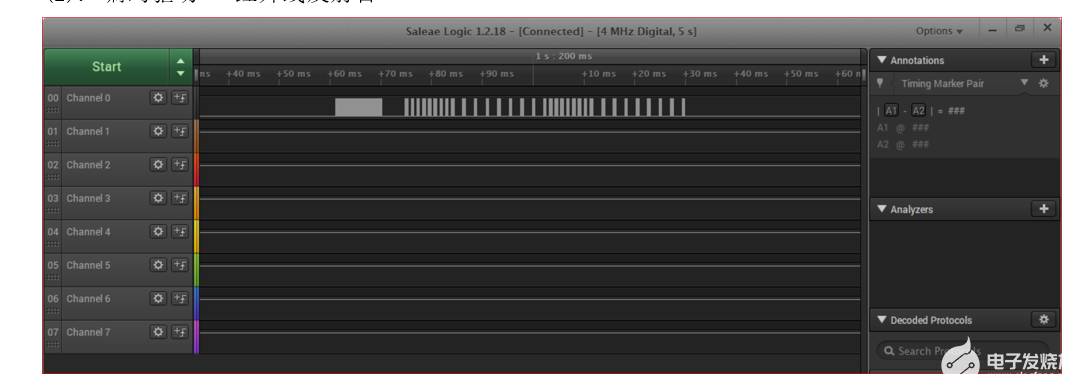
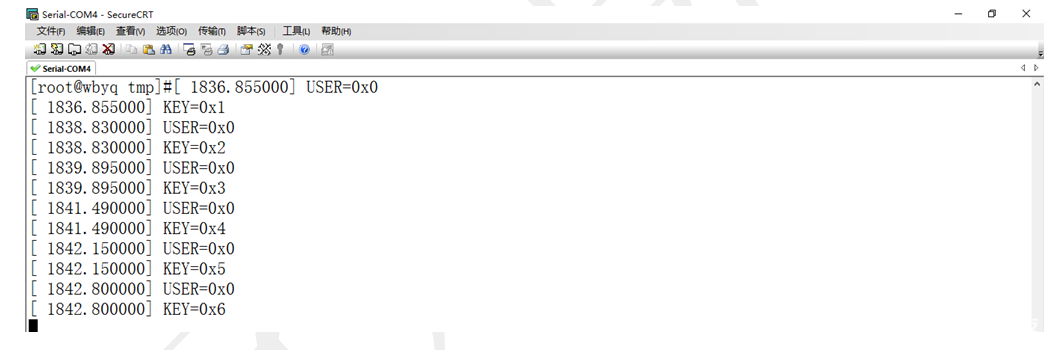
驱动安装后,解码的效果:
3. 案例代码
驱动代码思路: 采用外部中断接收NEC的数据,在工作队列里完成协议解析,最终通过printk打印出来。
#include
#include
#include
#include
#include
#include
#include
#include
static int irq;
#define NEC_INFRARED_GPIO EXYNOS4_GPX1(0)
static struct work_struct work;
/*获取高电平持续时间--us单位*/
static u32 GetTimeH(void)
{
ktime_t my_time,my_time2;
unsigned int i,j;
my_time=ktime_get(); //获取当前时间
i=ktime_to_us(my_time); //转 us
while(gpio_get_value(NEC_INFRARED_GPIO)){}
my_time2=ktime_get(); //获取当前时间
j=ktime_to_us(my_time2); //转 us
return j-i;
}
/*获取低电平持续时间--us单位*/
static u32 GetTimeL(void)
{
ktime_t my_time,my_time2;
unsigned int i,j;
my_time=ktime_get(); //获取当前时间
i=ktime_to_us(my_time); //转 us
while(gpio_get_value(NEC_INFRARED_GPIO)==0){}
my_time2=ktime_get(); //获取当前时间
j=ktime_to_us(my_time2); //转 us
return j-i;
}
/*
工作函数
*/
static u8 buf[4];//[0]用户码 [1]用户反码 [2]按键码 [3]按键反码
static void new_work_func(struct work_struct *work)
{
u8 data=0;
u32 time_us;
/*1. 判断引导码*/
time_us=GetTimeL();
if(time_us>12000 || time_us <7000)return; //标准9000
time_us=GetTimeH();
if(time_us>6000 || time_us <3000)return; //标准4500
/*2. 接收32位数据*/
int i,j;
for(i=0;i<4;i++)
{
for(j=0;j<8;j++)
{
time_us=GetTimeL();
if(time_us>700 || time_us <400)return; //标准560
time_us=GetTimeH();
if(time_us<700 && time_us>400) // 0 :标准560
{
data<<=1;
}
else if(time_us<1800 && time_us>1500) // 1 :标准1680
{
data<<=1;
data|=0x01;
}
else
{
return;
}
}
buf[i]=data;
}
printk("用户码:%d,按键码:%d\n",buf[0],buf[2]);
}
/*中断服务函数*/
irqreturn_t nec_irq_handler_func(int irq, void *dev)
{
/*添加工作到工作队列*/
schedule_work(&work);
return IRQ_HANDLED;
}
static int __init tiny4412_hello_module_init(void)
{
/*初始化工作函数*/
INIT_WORK(&work,new_work_func);
/*1. 获取中断号*/
irq=gpio_to_irq(NEC_INFRARED_GPIO);
/*2. 注册中断*/
request_irq(irq,nec_irq_handler_func,IRQF_TRIGGER_FALLING,"tinyy412_nec",NULL);
printk("驱动测试: 驱动安装成功\n");
return 0;
}
static void __exit tiny4412_hello_module_cleanup(void)
{
free_irq(irq,NULL);
printk("驱动测试: 驱动卸载成功\n");
}
module_init(tiny4412_hello_module_init); /*驱动入口--安装驱动的时候执行*/
module_exit(tiny4412_hello_module_cleanup); /*驱动出口--卸载驱动的时候执行*/
MODULE_LICENSE("GPL"); /*设置模块的许可证--GPL*/
-
红外线是什么,红外线简介2010-03-10 0
-
红外线通讯协议2012-08-20 0
-
简单易懂-红外线遥控解码接收程序2012-12-20 0
-
arduino红外线库的问题2013-03-04 0
-
【OK210试用体验】功能篇(6)Linux字符驱动之红外遥控驱动(待续)2015-08-16 0
-
NEC红外线2016-02-05 0
-
蓝牙学习型红外线遥控器(NEC协议编解码)2020-02-26 0
-
红外线通信协议IrDA2020-05-18 0
-
怎样去编写基于38khz的NEC协议红外接收编码与解码的程序2022-02-15 0
-
红外线遥控器解码程序2010-02-02 3152
-
NEC红外线设备又推新品“InfReC”2010-02-09 1017
-
STM32入门开发: NEC红外线协议解码(超低成本无线传输方案)2021-12-17 648
-
STM32: NEC红外线协议解码(超低成本无线传输方案)2022-03-14 4559
-
STM32F407入门开发: NEC红外线协议解码2022-05-28 4165
-
STM32F407开发板红外线解码功能应用案例2023-07-06 1533
全部0条评论

快来发表一下你的评论吧 !
