

STM32单片机串口接收数据的方法
控制/MCU
描述
串口作为单片机开发的一个常用的外设,应用范围非常广。大部分时候,串口需要接收处理的数据长度是不定的。那么怎么才能判断一帧数据是否结束呢,今天就以STM32单片机为例,介绍几种接收不定长数据的方法。
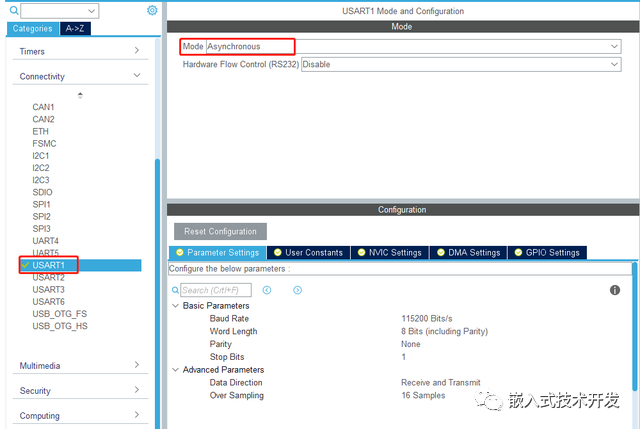
首先,我们需要打开一个串口,使用STM32CubeMx来配置,如下:
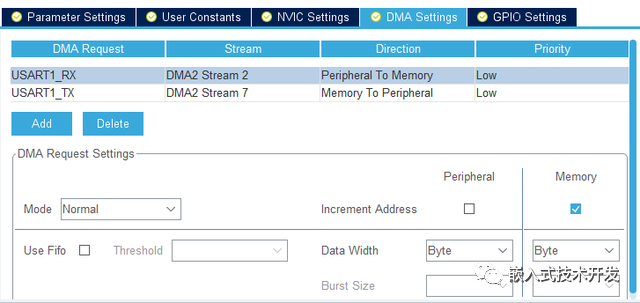
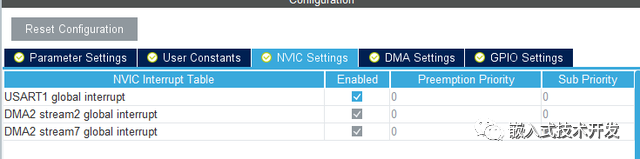
然后打开串口中断、添加发送和接收的DMA,DMA参数设置为默认即可,如下图。(DMA可根据自身需求选择是否打开)
配置一下时钟等,点击生成代码,这样就可以使用串口了。首先我们定义一个串口接收的结构体,并定义一个结构体变量,如下:
typedef struct{uint8_t RxBuf[RX_MAXLEN];//接收缓存uint16_t RxCnt; //接收数据计数uint16_t RxLen; //接收数据长度uint8_t RxStart; //开始接收标志uint8_t RxFlag; //一帧数据接收完成标志}Uart_Tpye_t;Uart_Tpye_t Uart1;
下面介绍几种接收数据的方法:
1.空闲中断
空闲中断可以配合接收中断或DMA来使用。
当使用DMA+空闲中断时,需要在初始化完成后手动打开空闲中断和DMA接收。
__HAL_UART_ENABLE_IT(&huart1,UART_IT_IDLE);//打开串口空闲中断HAL_UART_Receive_DMA(&huart1, Uart1.RxBuf, RX_MAXLEN); //串口DMA接收数据
编写空闲中断函数,如下:
//串口空闲中断void UART_IDLECallBack(UART_HandleTypeDef *huart){uint32_t temp;/*uart1 idle processing function*/if(huart == &huart1){if((__HAL_UART_GET_FLAG(huart,UART_FLAG_IDLE) != RESET)){__HAL_UART_CLEAR_IDLEFLAG(&huart1);//清除标志位/*your own code*/HAL_UART_DMAStop(&huart1);//停止DMAUart1.RxLen = RX_MAXLEN - __HAL_DMA_GET_COUNTER(&hdma_usart1_rx);// 获取DMA中传输的数据个数Uart1.RxFlag = 1;HAL_UART_Receive_DMA(&huart1,Uart1.RxBuf,RX_MAXLEN); //开启下次接收}}}
在主程序中判断接收完成标志,并处理数据:
if(Uart1.RxFlag == 1)//接收完一帧数据{printf("Rev %d Bytes ",Uart1.RxLen);Uart1.RxFlag = 0;}
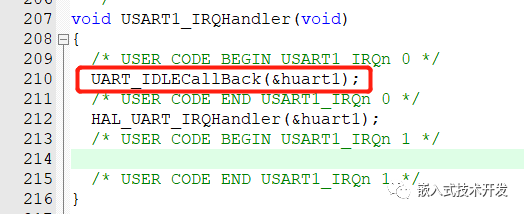
最后,别忘了在串口中断函数中调用自己编写的空闲中断函数。
运行程序测试,结果如下:

使用接收中断+空闲中断与DMA类似,只不过需要打开接收中断:
__HAL_UART_ENABLE_IT(&huart1,UART_IT_IDLE);//打开串口空闲中断HAL_UART_Receive_IT(&huart1, &RevByte, 1); //串口中断接收数据
编写接收中断回调函数,每次接收一个字节:
uint8_t RevByte;void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){if(huart->Instance==USART1){Uart1.RxBuf[Uart1.RxCnt]=RevByte;Uart1.RxCnt++;if(Uart1.RxCnt==RX_MAXLEN){Uart1.RxCnt = RX_MAXLEN-1;}HAL_UART_Receive_IT(&huart1, &RevByte, 1); //串口中断接收数据}}
编写空闲中断回调函数,与DMA的方式类似,只是数据长度判断方式不一样:
//串口空闲中断void UART_IDLECallBack(UART_HandleTypeDef *huart){uint32_t temp;/*uart1 idle processing function*/if(huart == &huart1){if((__HAL_UART_GET_FLAG(huart,UART_FLAG_IDLE) != RESET)){__HAL_UART_CLEAR_IDLEFLAG(&huart1);//清除标志位Uart1.RxFlag = 1;Uart1.RxLen = Uart1.RxCnt;Uart1.RxCnt = 0;}}}
同样,在主程序中判断一帧数据的接收完成并处理。
2.特点协议判断帧头帧尾及长度
有时候我们需要自己定义协议传输数据,这时候就可以在通讯协议里添加特点的帧头帧尾以及数据长度字节,通过判断这些字节来判断数据的开始和结束。假设定义一个简单的传输协议如下:
|
帧头 |
数据长度,1字节 |
数据,N字节 |
|
0x5A,0xA5 |
数据部分的字节数 |
有效数据 |
可以使用中断方式接收数据:
HAL_UART_Receive_IT(&huart1, &RevByte, 1); //串口中断接收数据
接收中断函数如下:
//串口接收中断回调函数uint8_t RevByte;uint16_t RevTick = 0;void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){static uint16_t Rx_len;if(huart->Instance==USART1){Uart1.RxBuf[Uart1.RxCnt]=RevByte;switch(Uart1.RxCnt){case 0:if(Uart1.RxBuf[Uart1.RxCnt] == 0x5A)//帧头1正确Uart1.RxCnt++;elseUart1.RxCnt = 0;break;case 1:if(Uart1.RxBuf[Uart1.RxCnt] == 0xA5)//帧头2正确Uart1.RxCnt++;elseUart1.RxCnt = 0;break;case 2:Rx_len = Uart1.RxBuf[Uart1.RxCnt];Uart1.RxCnt++;break;default:Uart1.RxCnt++;if((Rx_len+3) == Uart1.RxCnt)//数据接收完成{Uart1.RxFlag = 1;Uart1.RxLen = Uart1.RxCnt;Uart1.RxCnt = 0;}break;}HAL_UART_Receive_IT(&huart1, &RevByte, 1); //串口中断接收数据}}
同样,在主程序中判断一帧数据的接收完成并处理,运行测试结果如下:
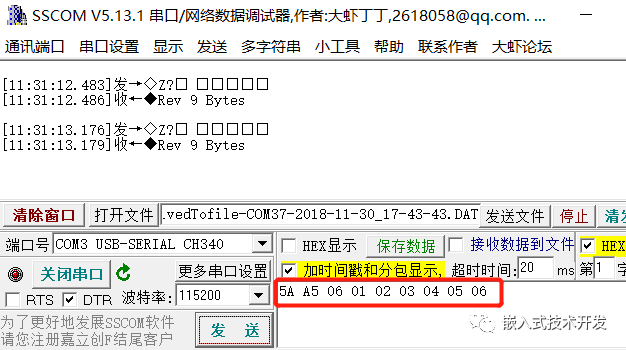
3.超时判断
超时判断其实与空闲中断的原理类似,只不过是通过定时器来取代空闲中断来判断一帧数据的结束,一般采样接收中断+超时判断的方式。之前的文章Freemodbus移植就是采样这种方式。
超时判断的时间跟波特率有关,假设串口起始位和结束位各1位,那么接收一个字节就需要8+2=10位,在9600波特率下,一秒钟就能接收9600/10=960字节。也就是一个字节需要1.04ms,那么超时时间最小可以设置为1.5倍的单字节接收时间,或者更长。
超时判断可以使用硬件定时器或软件定时器来实现。硬件定时器的方式可以参考之前的Freemodbus移植部分的程序。软件定时器定义一个计时变量,该变量在systick中断中+1实现计时,可以节省硬件资源,但计时最小分辨率跟systick中断有关。
编写中断接收函数:
//串口接收中断回调函数uint8_t RevByte;uint16_t RevTick = 0;void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){if(huart->Instance==USART1){Uart1.RxBuf[Uart1.RxCnt]=RevByte;Uart1.RxCnt++;Uart1.RxStart = 1;//开始接收标志RevTick = 0;//计时清零if(Uart1.RxCnt==RX_MAXLEN){Uart1.RxCnt = RX_MAXLEN-1;}HAL_UART_Receive_IT(&huart1, &RevByte, 1); //串口中断接收数据}}
编写超时判断函数,在Systick中断中调用:
//串口接收超时判断,该函数在Systick中断(1ms中断一次)中调用void UartTimeOut(){if(Uart1.RxStart == 1){RevTick++;if(RevTick > 2){Uart1.RxLen = Uart1.RxCnt;Uart1.RxCnt = 0;Uart1.RxStart = 0;Uart1.RxFlag = 1;}}}
使用时只要打开接收中断即可,不再需要空闲中断。
HAL_UART_Receive_IT(&huart1, &RevByte, 1); //串口中断接收数据
同样,在主程序中判断一帧数据的接收完成并处理。测试结果就不贴了。
4.总结
上面几种方式都可以实现串口接收不定长数据,各有优缺点,可根据实际需求选择用哪种。需要注意的是,上面的例程只是简单地接收数据,实际应用中,还需要考虑连续接收多帧数据的情况,是缓存之后处理,还是舍弃后面的数据,都需要自己写程序实现。
审核编辑:汤梓红
-
STM32单片机接收不定长度字节数据的方法解析相关资料推荐2021-07-01 0
-
STM32单片机的接收不定长度字节数据的方法2021-08-04 0
-
详细图文剖析STM32单片机串口一键下载威廉希尔官方网站 与操作方法2017-12-31 46971
-
单片机入门汇编之单片机接收计算机串口发送的数据程序免费下载2019-03-07 903
-
单片机的串口接收和发送数据的程序免费下载2019-05-16 870
-
如何使用51单片机进行串口通信的发送与接收2019-07-08 6997
-
基于STM32单片机的串口通信资源2021-07-05 1464
-
单片机串口接收多字节数据2021-11-17 737
-
单片机串口接收多字节2021-11-17 693
-
单片机串口接收的几种常用的数据处理方法2021-12-23 1138
-
stm32 串口接收不定长度数据及黏包处理 + 串口DMA接收2021-12-23 1420
-
单片机接收不定长的数据,最优解是DMA+串口空闲中断2021-12-28 849
-
STM32单片机如何处理QT上位机串口中发过来的数据?2023-09-14 3210
-
单片机串口通信的接收与发送2023-12-20 3677
全部0条评论

快来发表一下你的评论吧 !
