

飞桨目标检测端到端开发套件PaddleDetection正式开源车辆分析工具PP-Vehicle
描述
停车场闸机的车牌识别、道路两侧的违停检测、繁华路口的车流统计、茫茫车海中的车辆锁定…这些场景背后的技术原理大家是否在心中简单构思过?抑或想要抽时间自己攒一套出来可却又不知从何下手?——PP-Vehicle来告诉你答案。
继行人分析工具PP-Human之后,飞桨目标检测端到端开发套件PaddleDetection正式开源车辆分析工具PP-Vehicle!
 PP-Vehicle功能全景图
PP-Vehicle功能全景图
PP-Vehicle是一款针对车辆分析相关场景的开源工具,产品主要围绕以下几个方面进行设计开发:
-
实用性:针对车辆分析场景共性的底层模型进行优选迭代;针对几个高频场景进行了详细的后处理策略设计,可以满足业务的快速上线需求。同时提供丰富的二次开发教程,方便用户根据自己的业务场景进行私有化开发。
-
泛化性:在公开数据集以及自采数据集上进行充分训练,并且提供预训练模型,覆盖车辆分析中监控视角、驾驶员视角、俯拍视角等常见相机视角。
-
低代码:实现1行代码快速部署,支持图片、视频、单路/多路rtsp视频流输入,修改配置文件即可快速实现策略修改以及pipeline的组合。
接下来让我们具体看一下PP-Vehicle的工作。
搭配源码食用更佳!
https://github.com/PaddlePaddle/PaddleDetection
记得Star收藏,
防止走丢又实时关注更新!

整体方案
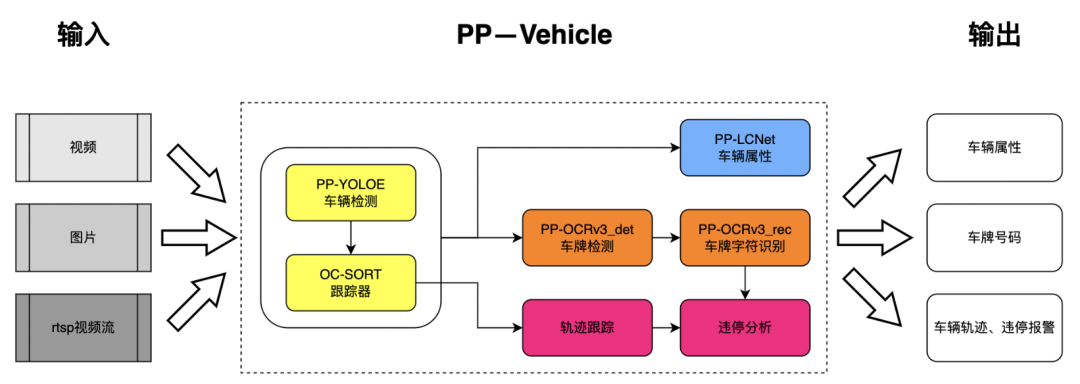
PP-Vehicle技术架构
PP-Vehicle整体分为输入、核心算法、输出三部分:
-
输入:支持离线图片、视频以及rtsp视频流等形式,可根据输入类型快速配置,如下图所示,为输入配置为rtsp拉流的示例。

PP-Vehicle rtsp拉流预测示例
-
核心算法:主要由预训练模型以及逻辑策略组成。预训练模型主要有4个:车辆检测模型、车辆跟踪模型、车牌识别模型、车辆属性分析模型。各个模型性能见下表:
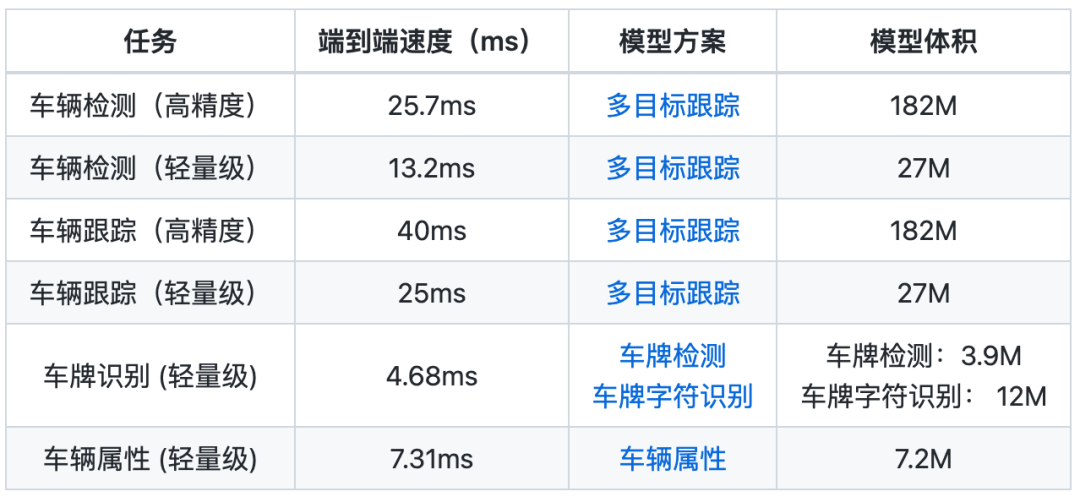
预训练模型
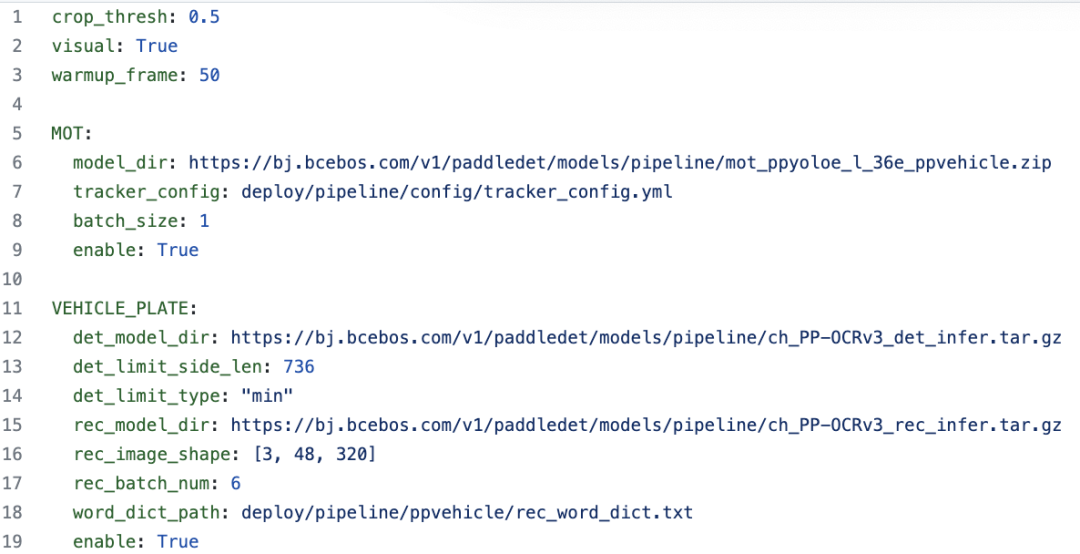
违停pipeline配置文件示例
-
输出:包括车牌信息、车辆轨迹、车辆属性、违停信息等;同时支持这些信息的可视化渲染输出,如下图为直接配置可视化信息rtsp推流显示。

rtsp推流展示示例

详见:
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/deploy/pipeline/docs/tutorials/PPVehicle_QUICK_STARTED.md
方案简析
PP-Vehicle针对一些高频车辆分析场景提供了详细的解决方案,在这里就主要思路进行简析,详细的解析大家可以关注课后的海报,听一听开发同学的详解。
车牌识别方案:
-
通过目标检测来获取图片中的车辆检测框,模型方案为PP-YOLOE-l。当输入为视频时,会基于车辆检测框,使用OC-SORT跟踪模型来完成车辆的多目标跟踪;
-
通过车辆检测框的坐标截取对应位置图像;
-
使用车牌检测模型在每张车辆截图中识别车牌所在位置,同理截取车牌区域,模型方案为PP-OCRv3车牌检测模型;
-
使用字符识别模型识别车牌中的字符,模型方案为PP-OCRv3车牌识别模型;
-
此外还使用了一些优化策略提升速度以及准确率。
-
使用跳帧策略,每10帧做一次车牌检测,避免每帧做车牌检测的算力消耗;
-
车牌结果稳定策略,避免单帧结果的波动,利用同一个id的历史所有车牌识别结果进行投票,得到该id最大可能的正确结果;
-
车辆检测模型联合BDD-100k和UA-DETRAC数据集训练, 车牌检测方案采用CCPD数据集在车牌场景finetune提升检测精度。
详见:
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/deploy/pipeline/docs/tutorials/ppvehicle_plate.md
车辆属性识别方案:
-
车辆属性识别模型使用了PaddleClas的超轻量图像分类方案(PULC,Practical Ultra Lightweight image Classification)。
-
并在该模型的基础上,进一步使用了以下优化方案:
-
使用SSLD预训练模型,在不改变推理速度的前提下,精度提升约0.5个百分点;
-
融合EDA数据增强策略,精度提升0.52个百分点;
-
使用SKL-UGI知识蒸馏, 精度提升0.23个百分点。
详见:
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/deploy/pipeline/docs/tutorials/ppvehicle_attribute.md
违停检测方案:
-
通过目标检测来获取车辆检测框,模型方案为PP-YOLOE;
-
基于跟踪算法获取每辆车的轨迹,模型方案为OC-SORT。如果车辆中心在违停区域内且在指定时间内未发生移动,则视为违章停车;
-
使用车牌识别模型得到违章停车车牌并可视化。
详见:
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/deploy/pipeline/docs/tutorials/ppvehicle_illegal_parking.md
二次开发
此外,PP-Vehicle支持二次开发,大家可以在自己的数据集上进行模型训练、策略改写等,定制化自己的专属PP-Vehicle。如下图为车牌识别任务二次开发示例:

二次开发示例
详见:
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/docs/advanced_tutorials/customization/ppvehicle_plate.md
部署优化
特别的,PP-Vehicle针对边缘端部署场景进行了优化,如针对Jetson系列模型选择轻量级版本,同时开启跟踪跳帧功能进行优化,同时提供了丰富的部署选项以达到性能-速度的平衡。

Jetson配置参数
详见:
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/deploy/pipeline/docs/tutorials/PPVehicle_QUICK_STARTED_en.md#Inference-Deployment
审核编辑 :李倩
-
在Arm虚拟硬件上部署PP-PicoDet模型2022-09-16 0
-
在Arm虚拟硬件上部署PP-PicoDet模型的设计方案2022-09-23 0
-
ZigBee开发套件内容2010-11-15 844
-
NXP无人机开发套件及工具2017-02-10 1479
-
NXP新能源汽车BMS开发套件及工具2017-03-24 1933
-
贸泽开售AAEON UP Squared Grove IoT开发套件 兼具Intel处理能力与Arduino易用性2018-03-28 9463
-
关于讯飞推出双麦阵列开发套件的性能分析和介绍2019-09-27 4566
-
什么是物联网开发套件?如何挑选物联网开发套件2020-05-29 5225
-
NVIDIA 与飞桨团队合作开发基于 ResNet50 的模型示例2022-10-18 1202
-
PaddleDetection 发新,欢迎在 NVIDIA NGC 飞桨容器中体验最新特性!2022-11-10 889
-
基于OpenVINO™工具包部署飞桨PP-Human的全流程2023-02-23 775
全部0条评论

快来发表一下你的评论吧 !
