

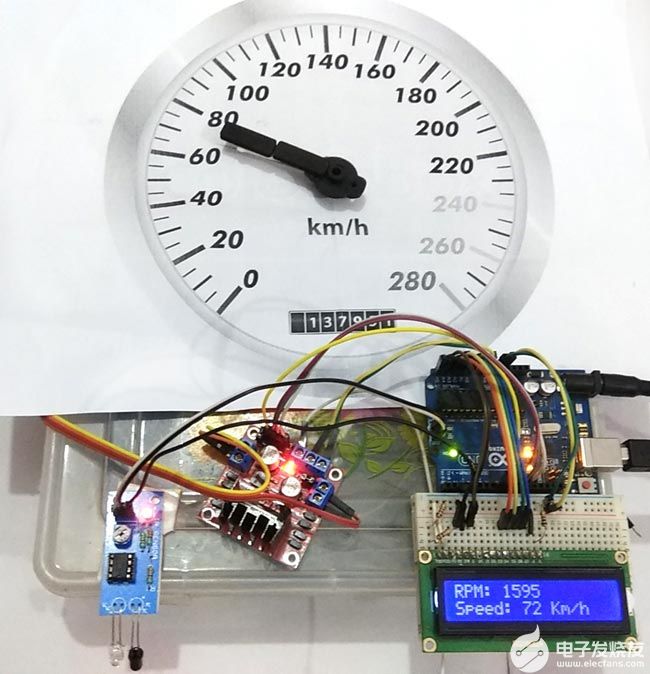
如何使用Arduino简单地构建模拟速度表
测量仪表
描述
测量车辆或电机的速度/转速一直是一个值得尝试的迷人项目。在这个项目中,我们将使用 Arduino 构建一个模拟速度表。我们将使用红外传感器模块来测量速度。还有其他方法/传感器,例如霍尔传感器来测量速度,但使用红外传感器很容易,因为红外传感器模块是非常常见的设备,我们可以轻松地从市场上获得它,也可以用于任何类型的电机/车辆。
在这个项目中,我们将以模拟和数字形式展示速度。通过做这个项目,我们还将提高我们学习Arduino和步进电机的技能,因为这个项目涉及使用中断和定时器。在该项目结束时,您将能够计算任何旋转物体所覆盖的速度和距离,并将它们以数字格式显示在 16x2 LCD 屏幕上以及模拟仪表上。因此,让我们从带有Arduino的速度表和里程表威廉希尔官方网站 开始
所需材料
阿杜伊诺
双极步进电机(4线)
步进电机驱动器(L298n模块)
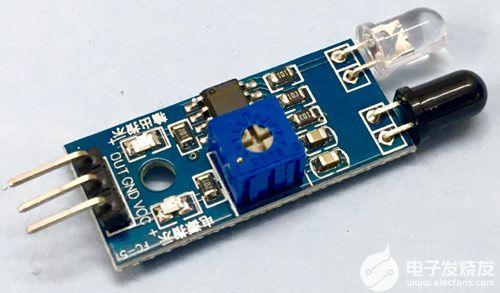
红外传感器模块
16*2液晶显示屏
2.2k 电阻
连接线
面包板。
电源
车速表图片打印输出
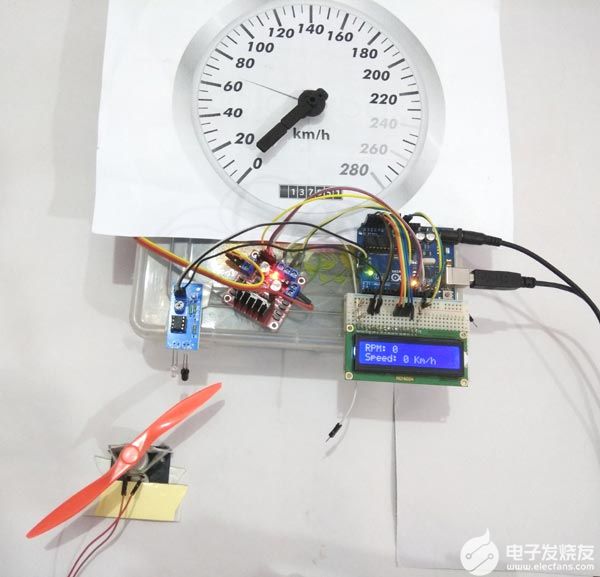
计算速度并将其显示在模拟速度表上
红外传感器是一种可以检测其前方物体存在的设备。我们使用了两个叶片转子(风扇),并将红外传感器放置在其附近,以便每次叶片旋转时,红外传感器都会检测到它。然后,我们使用Arduino中的计时器和中断的帮助来计算电机完全旋转所需的时间。
在这个项目中,我们使用最高优先级的中断来检测rpm,并将其配置为上升模式。因此,每当传感器输出从低到高时,将执行函数 RPMCount()。由于我们使用了两个叶片转子,这意味着该函数将在一圈内调用 4 次。
知道所花费的时间后,我们可以使用以下公式计算 RPM,其中 1000/时间将给我们 RPS(每秒转数),进一步乘以 60 将得到 RPM(每分钟转数)
rpm = (60/2)*(1000/(millis() - time))*REV/bladesInFan;
获得 RPM 后,可以通过给定的公式计算速度:
Speed = rpm * (2 * Pi * radius) / 1000
我们知道Pi = 3.14,半径为4.7英寸
但首先我们需要将半径从英寸转换为米:
radius = ((radius * 2.54)/100.0) meters
Speed= rpm * 60.0 * (2.0 * 3.14 * radius)/ 1000.0) in kilometers per hour
在这里,我们将 rpm 乘以 60 将 rpm 转换为 rph(每小时转数),除以 1000 将米/小时转换为公里/小时。
在以kmh为单位的速度之后,我们可以以数字形式直接在LCD上显示这些值,但是要以模拟形式显示速度,我们需要再进行一次计算才能找出否。步进电机应移动以在模拟仪表上显示速度。
在这里,我们使用了一个用于模拟仪表的 4 线双极步进电机,它具有 1.8 度意味着每转 200 步。

现在我们必须在车速表上显示 280 公里/小时。所以要显示280 Kmh步进电机需要移动280度
所以我们有 maxSpeed = 280
最大步数将是
maxSteps = 280/1.8 = 155 steps
现在我们在 Arduino 代码中有一个函数,即map函数,它在这里用于将速度映射到步骤中。
Steps = map(speed,0,maxSpeed,0,maxSteps);
所以现在我们有
steps=map(speed,0,280,0,155);
计算步长后,我们可以直接将这些步进电机功能应用于移动步进电机。我们还需要通过使用给定的计算来照顾步进电机的当前步长或角度
currSteps=Steps
steps= currSteps-preSteps
preSteps=currSteps
这里的 currSteps 是来自上次计算的当前步骤,preSteps 是上次执行的步骤。
威廉希尔官方网站 图和连接
这个模拟车速表的威廉希尔官方网站 图很简单,这里我们使用 16x2 LCD 以数字形式显示速度,并使用步进电机旋转模拟车速表指针。
16x2 LCD连接在Arduino的以下模拟引脚上。
RS - A5 RW - GND
EN - A4 D4
- A3 D5
- A2 D6 - A1
D7 - A0
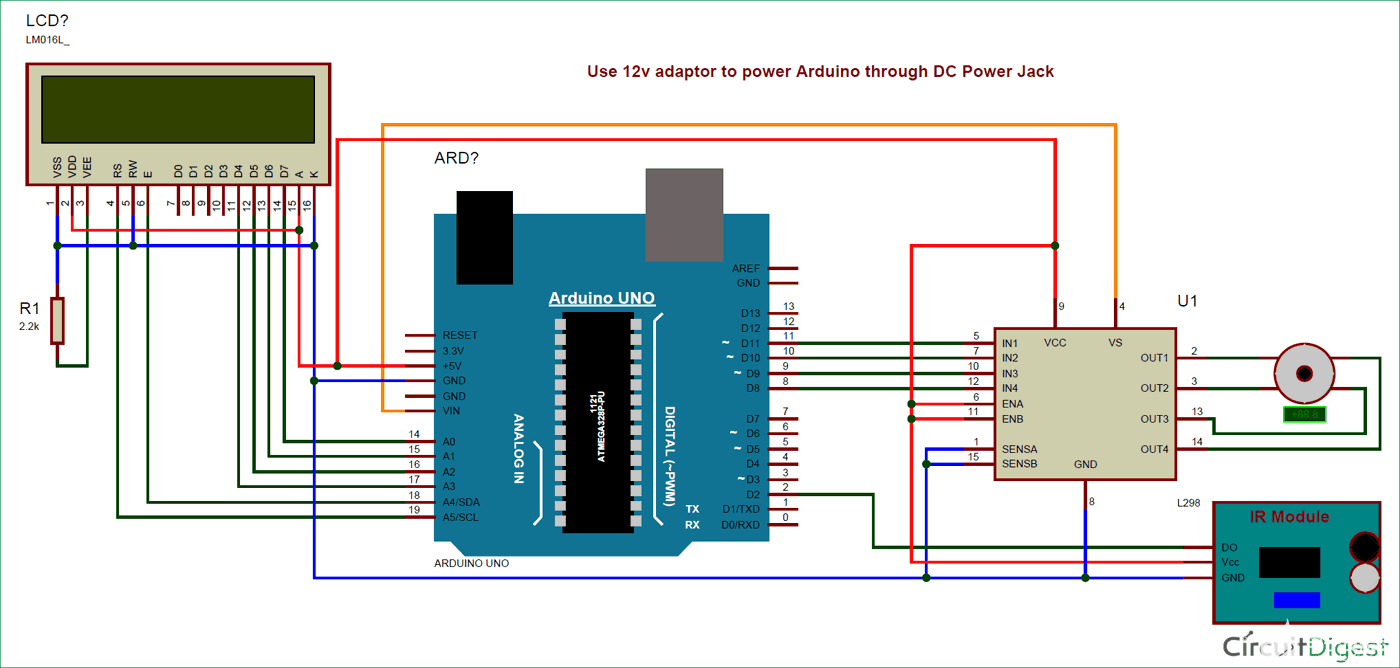
2.2k电阻用于设置LCD的亮度。红外传感器模块,用于检测风扇的叶片以计算转速,连接到中断 0 表示 Arduino 的 D2 引脚。
这里我们使用了步进电机驱动器,即L293N模块。步进电机驱动器的IN1、IN2、IN3和IN4引脚直接连接到Arduino的D8、D9、D10和D11。其余连接在威廉希尔官方网站 图中给出。
编程说明
Arduino Speedomete r的完整代码在最后给出,在这里我们解释了其中的一些重要部分。
在编程部分,我们包含了所有必需的库,如步进电机库、液晶 LCD 库和它们的声明引脚。
#include
LiquidCrystal lcd(A5,A4,A3,A2,A1,A0);
#include
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
在此之后,我们采用一些变量和宏来执行计算。上一节中已经解释了计算。
volatile byte REV;
unsigned long int rpm,RPM;
unsigned long st=0;
unsigned long time;
int ledPin = 13;
int led = 0,RPMlen , prevRPM;
int flag = 0;
int flag1=1;
#define bladesInFan 2
float radius=4.7; // inch
int preSteps=0;
float stepAngle= 360.0/(float)stepsPerRevolution;
float minSpeed=0;
float maxSpeed=280.0;
float minSteps=0;
float maxSteps=maxSpeed/stepAngle;
之后,我们在设置功能中初始化LCD,串行,中断和步进电机
void setup()
{
myStepper.setSpeed(60);
Serial.begin(9600);
pinMode(ledPin, OUTPUT);
lcd.begin(16,2);
lcd.print("Speedometer");
delay(2000);
attachInterrupt(0, RPMCount, RISING);
}
在此之后,我们读取循环函数中的rpm并执行计算以获得速度并将其转换为运行步进电机的步骤,以模拟形式显示速度。
void loop()
{
readRPM();
radius=((radius * 2.54)/100.0); // convering in meter
int Speed= ((float)RPM * 60.0 * (2.0 * 3.14 * radius)/1000.0);
// RPM in 60 minute, diameter of tyre (2pi r) r is radius, 1000 to convert in km
int Steps=map(Speed, minSpeed,maxSpeed,minSteps,maxSteps);
if(flag1)
{
Serial.print(Speed);
Serial.println("Kmh");
lcd.setCursor(0,0);
lcd.print("RPM: ");
lcd.print(RPM);
lcd.print(" ");
lcd.setCursor(0,1);
lcd.print("Speed: ");
lcd.print(Speed);
lcd.print(" Km/h ");
flag1=0;
}
int currSteps=Steps;
int steps= currSteps-preSteps;
preSteps=currSteps;
myStepper.step(steps);
}
这里我们有 reapRPM() 函数来计算 RPM。
int readRPM()
{
if(REV >= 10 or millis()>=st+1000) // IT WILL UPDATE AFETR EVERY 10 READINGS or 1 second in idle
{
if(flag==0)
flag=1;
rpm = (60/2)*(1000/(millis() - time))*REV/bladesInFan;
time = millis();
REV = 0;
int x= rpm;
while(x!=0)
{
x = x/10;
RPMlen++;
}
Serial.println(rpm,DEC);
RPM=rpm;
delay(500);
st=millis();
flag1=1;
}
}
Finally, we have interrupt routine which is responsible to measure revolution of object
void RPMCount()
{
REV++;
if (led == LOW)
{
led = HIGH;
}
else
{
led = LOW;
}
digitalWrite(ledPin, led);
}
-
自行车里程速度表的工作原理及设计2018-09-21 16428
-
速度表的VHDL编程2008-12-22 0
-
请问西门子CPU222配合耐特PLC模块怎么控制速度表呢?2018-07-16 0
-
请问速度表是PTO控制的?还是用PWM呢?2019-07-31 0
-
矿用电机车速度表2010-05-27 986
-
速度表威廉希尔官方网站2009-02-14 1526
-
自行车里程速度表的威廉希尔官方网站 原理及程序设计2019-11-21 6466
-
使用Arduino和加速度计构建一个简单且便宜的计步器2022-08-19 4829
-
Arduino电容表构建2022-11-14 596
-
如何使用Arduino构建一个简单的欧姆表2022-11-18 3166
-
使用Arduino的简单Vu表2022-11-23 507
-
简单的Arduino项目之创建您自己的速度选择和踩踏2022-12-27 285
-
Arduino简单的滑块构建电子设备2022-12-30 400
-
带Arduino的模拟速度计或音量计2023-07-12 409
-
基于摩托车电子速度表威廉希尔官方网站 设计2023-10-26 277
全部0条评论

快来发表一下你的评论吧 !
