

ToA和TDoA定位技术的异同
RF/无线
描述
紧接着上一期无线定位技术漫谈,在本期和后续几期公众号当中,我们谈一谈相对领先的ToA和TDoA定位技术的异同和演化,以及已经在“理论上”显露出优势的基于5G网络的定位技术改善。但请读者注意“理论上”的限定语……还是那句话,理想丰满现实骨感,任何存在于理论上的优势也不是都能在实际部署当中落地。正是因为3GPP太希望在5G上毕其功于一役,定义大量理论上的优秀核心特性于一张无线网络之上,从而不可避免地给5G部署工程带来过多的不确定性和争议,甚至出现网络能力跑赢市场需求的反常现象。
但不管如何,5G在对于定位业务的支撑上,确实花了心思,也体现出技术标准的众多建议方在不断的市场需求和技术应对的迭代历练中,体现出强烈的向上趋势。也许最终满足人类活动大部分的定位需求还需时日,但技术向上的趋势已经可以让我们看到希望了。
本来写这个系列的公众号文章,目标是围绕华为的Petal map和其背后可能用到的定位技术的。但小编写着写着就发现,如果打算将这个话题展开和深入,那么对无线定位技术的系统性介绍,就不可或缺了。尤其对于华为来说,其为毫无争议的现代无线通讯技术领军者,这个话题里所有谈到的无线定位技术、概念和产品,在华为的产品中和标准中,都有可能涉及。故此,我们还是延续上一期关于无线定位技术的漫谈,暂时脱离Petal map这个具体技术,慢慢把“无线定位”这个大背景故事补足补全。有兴趣的读者请耐心阅读。
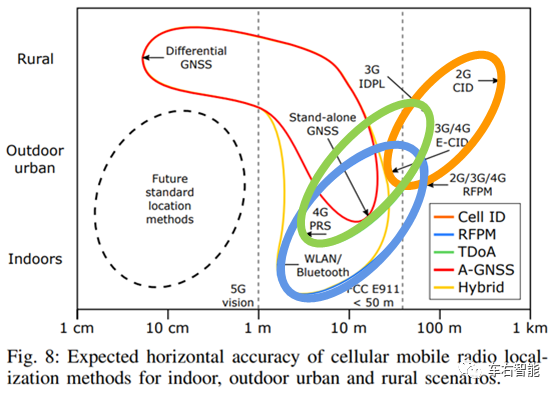
图一【huawei petal map-25.png】初始来源不详,从与非网文章《5G的高精度定位》截图获取,URL https://www.eefocus.com/communication/463840;
图1中的橙色圈和蓝色圈是我们上一期公众号的主题,分别对应早期的ECID定位技术和后续的RFPM pattern matching技术。我们对比两种技术的适用场景时可以发现,虽然RFPM在定位精度上比ECID前进了一个数量级,从100m尺度进化到10m尺度,但RFPM的硬伤依然存在,那就是部署成本太高。部署成本包含:RF pattern初始数据库的建立和不断维护更新,两方面都涉及大量人力物力的投入。如果一旦RFPM定位业务推广有问题,那么成本压力就会凸显出来,从而反过来影响RFPM定位精度(小编:没钱赚自然没有动力去更新关键的RFPM数据库)。实际上,小编几乎没有听说过有运营商在实际部署RFPM的案例——国内肯定是没有。当然,RFPM的优点同样突出,它确实不需要新增部署专门的无线网络,可以完全和通讯无线网络在功能上解耦合,也不需要在无线网络内部增加任何占用宝贵频谱资源的定位信令开销,更能提供一定的多径对抗能力,这一点在室内定位场景中尤其重要。因此RFPM也确实在一些单纯的室内定位环境下找到了生存空间(小编:室内环境面积有限,RFPM初始定位指纹数据库的建立和维护成本可以接受)。以WiFi为例,基于WiFi接入技术的RFPM射频指纹技术,还是比较流行的。以企业为单位可以自行部署、实施和维护RFPM定位指纹数据库,日常维护的开销也不算太大,因而得以流行。
由此,我们可以看到这个定位技术上的发展趋势呈现出了上图1所描绘的态势,Indoor室内环境下和Outdoor室外粗定位环境下,可以分别由RFPM和ECID技术支撑,基本可以满足市场需求。但针对室外的更高精度的定位需求,特别是在密集城区(Urban区域)多径环境恶劣的条件下,ECID的定位精度差强人意和RFPM的高昂部署成本,就成为必须要克服的技术短板了。在这个大趋势下,TDoA-Time Difference of Arrival无线定位技术应运而生了(小编:即上图1中间的绿色圈,请读者注意它和橙色、蓝色圈之间的关系)。TDoA正是针对在密集城区提供室外环境下10m级别的定位精度所迈出的重要一步!
ToA和TDoA定位技术的异同
TDoA全称为Time Difference ofArrival(到达时间差)定位方法,是利用多点位到达同一客户端的路程耗时时间差来进行定位核算的,后面我们再细说它的基础概念。现在读者只需要知道,当前技术条件下,对于现代通讯网络体系来说,最好的基于时间(电磁波路程耗时)的定位方法,基本就是TDoA了,没有其他选择。
比TDoA更早也更直接的定位方法叫做ToA-Time of Arrival,是直接基于到达时间(绝对时间)的定位方法。ToA定位的本质和TDoA一样,也是基于电磁波传播消耗时间这个基本原理的。但ToA的缺点在于有个严格约束条件,即参与测距的双方,需要实现信号发送设备(基站)和接收设备(手机)之间必须时钟同步(小编:这就意味着参与定位的基站设备之间也自然保持时钟同步了)。如果基站与手机之间时间不同步(小编:手机作为终端设备和基站之间只存在无线接口,在这个无线接口上实现足够精确的时间同步在技术上不是不可能,但一个是成本太高,另一个是通讯机制里也没有这个必要),信号的发送方和接收方双方都不知道信号的绝对时间(基准),这样会造成信号在空中飞行的时间估算和定位误差。这个误差在定位领域是不可忽略的,读者可以自己计算一下,光速即电磁波的传播速度是3*10的8次方(米),这就意味着基站和手机在时间上的微小不同步都会导致时间-距离定位方法的误差:
毫秒级别的同步误差就不提了,10的负3次方,会导致10的5次方米(百公里)的误差;
微秒级别的同步误差,10的负6次方,会导致10的2次方米(百米)的误差;
纳秒级别的同步误差,10的负9次方,仅会产生0.x米(分米)级别的误差。
读者需要特别注意的是,以上所罗列的误差只是伪距的误差,就是从手机到基站直线距离的误差,而非最终手机自身的定位经纬度误差,这之间有一个几何转换关系就不多说了。总之,在空中无线接口上,要做到基站和手机客户端之间的精准时间同步(纳秒级别是必须的)是利用ToA定位方法实现精准定位的前提,没有纳秒级别的时间同步基础,就无法提供足够精确的伪距,也就无法获取最终的终端地理定位精度。当然,可能有的读者已经意识到了,GPS其本质就是利用ToA方法来定位的,在开阔地无遮挡的前提下也确实可以提供米级别的定位精度,那么为什么GPS、北斗等GNSS系统的ToA定位精度就可以达到如此高度呢?
基于ToA的GPS定位工作原理
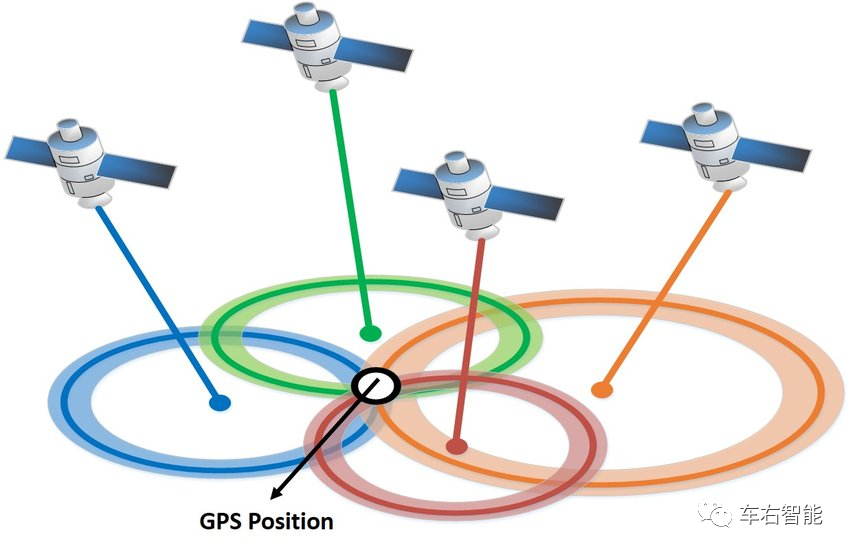
图二【huawei petal map-4.png】来自论文《Integrated Cooperative Location in VANETs for GPSDenied Environments》的插图,URL https://www.researchgate.net/figure/Trilateration-based-GPS-position-with-no-errors-in-satellites-signals_fig2_282359540;
本质来说,部署在环地球轨道的GNSS系统例如GPS和咱们自己的北斗3号,首先是一个精确的全网时间同步系统,要求所有参与在GNSS系统内的网元,不管是系统侧还是终端侧,客观上都需要尽力纳入同一个时间节奏中去,这是个大前提,也是必须的。(小编:以GPS为例,由GPS系统通过卫星信号发播的原子时间,GPS时间用自1980年1月6日零点( UTC 时间)起的星期数和该星期内内的秒数来表示;工程上,GPS 接收机会根据闰秒数将GPS时间换算为我们通常使用的UTC时间。GPS时间的源头是美国海军天文台的守时原子钟组)GNSS=Global Navigation SatellitesSystem提供精准位置信息的前提是它可以为内部所有网元提供精确的时间信息,否则也就谈不上定位功能了。所以GNSS的空中接口传递的信息内容(小编:也叫做导航电文),包含完整的星历信息也包含每颗卫星的时钟状态信息,可快速帮助所有接收并解析电文的终端,实现时间同步和在此基础之上的伪距修正和定位。
我们看看实际GNSS的测量理论公式:
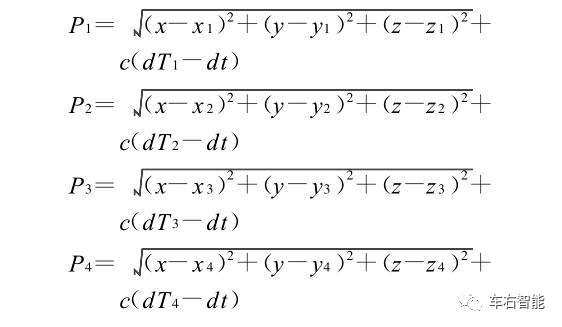
图三【huawei petal map-26.png】来自学术文章《GPS移动定位与移动网络定位精度的分析》的插图,URLhttps://m.thepaper.cn/baijiahao_8116945;
图3的P1-P4是GPS终端开机后所同时观察到的来自四颗卫星的伪距Pseudo Range;带下角标的(x,y,z)是从导航电文解码得到的卫星当前时刻的位置坐标(最少四颗);dT1、dT2、dT3、dT4也是从导航电文中获取的已知这四颗卫星时钟偏差;c为光速;dt则为终端自身未知的接收机时间偏差。这样就很容易理解了,四个未知数和四个方程,通过求解以上的伪距方程,就能得到终端接收机位置(x,y,z)及时钟偏差(dt)。实际使用场景中,由于接收机往往可以锁定4颗以上的卫星(小编:就是从极微弱的空中信号中,解码读出多颗卫星的导航电文),因此接收机可按卫星的星座分布分成若干组,每组4颗,然后通过算法挑选出误差最小的一组用于定位,从而进一步提高定位精度。
然这些都是纯理论,实际的终端位置结算和时间同步算法要更复杂一些,GPS或者北斗、伽利略和格伦纳斯系统模块是专门优化的芯片,可以在终端上实现快速的电文解码、位置解算和时间同步。关于时间和位置两个互为依赖关系的参数,到底谁先谁后得到近似的真值没必要深究,因为图3这种非线性方程组的解算都是采用迭代方法,最终在时间和位置上都收敛到指定的误差范围内后,计算结束。
GPS的定位中,还有其他一些影响伪距测量误差的因素存在,比如地面的多径效应、大气电离层的时延等等,但这都不是核心问题。GPS作为GNSS的技术先驱,通过较小的空间投资和地面控制系统建设,就能实现全球范围内,甚至包含近地空间内的物体的高精度定位和全方位的时间同步,而且享受定位服务的客户端数量没有限制,实在是令人赞叹。小编目前查到的资料表明,GPS时间同步精度可以达到30ns纳秒,优化后可以更低。北斗属于同一个级别,因为时间不同步所引起的伪距误差可以控制在10米尺度。这就是GNSS采用ToA方法的技术背景。
GNSS有一套具备高度精度的地面控制系统和时钟源,地理位可能不止一处,而是大跨度的多处位置部署。这样可以全面地、无时不刻地监控轨道卫星的位置和时钟状态。美帝的GPS和欧洲的伽利略系统,此时就具备足够的优势了,一个是盟国众多,另一个是殖民地众多分布广泛,所以建立跨越全球地里的GPS地面监控站并非难事,但对于中国来说就非常困难,南美洲的阿根廷和非洲南部的一些国家对我们的测控站分布就特别关键…..北斗3号的卫星矩阵设计和GPS不一样,带入高轨(地球同步轨道)卫星,就是受到了这个制约条件而做出的适应性调整。
啰嗦到现在,ToA和GNSS卫星定位系统之间的关系就基本理清楚了。在国家力量的支持下,GNSS系统本质上是在地球的近地空间范围内部署了时间同步系统,由地面时钟源和测控中心维护GNSS卫星矩阵的时钟同步。同时,地面测控也要精准测控卫星矩阵中每一颗卫星的轨道位置。在所有这些系统侧的能力具备之后,GNSS星座会穿越大气层向地球表面持续发送导航电文(小编:导航电文民用级别上是公开的,但根据不同的应用级别会有不同的加密方法,这就超出我们本篇要谈论的范畴了)。任何一台符合标准的GNSS终端,都可以在空气中捕捉到极其微弱的导航电文信号,并从导航电文中解读出一切计算自身位置和校准自身时钟偏移所需要的计算要素。最后经计算获取收敛的最终位置和时间。
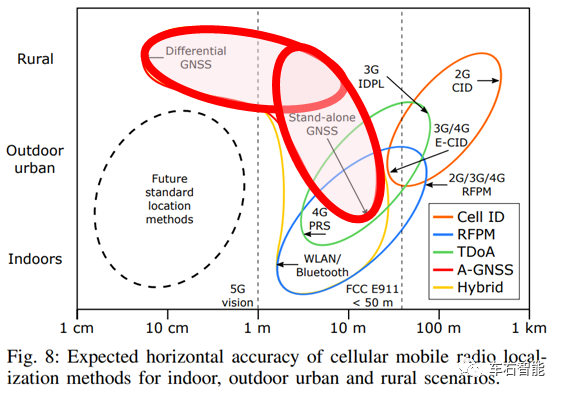
图四【huawei petal map-28.png】初始来源不详,从与非网文章《5G的高精度定位》截图获取,URL https://www.eefocus.com/communication/463840;
GNSS实际上除了授时和定位之外,不承载任何其他业务了(小编:北斗系统在早期是提供一些短报文通讯服务的,但很有限,属于特殊服务;现在的北斗3号是否保留了这个业务小编也不清楚)。正因为如此,GNSS系统的空中接口协议往往被设计得很简洁、高效,重复广播卫星星历就是电文的全部。这也是GNSS可以在全系统内实现时钟同步,并在此基础之上构建基于ToA定位能力的原因。参考上图4,GNSS系统在urban城区室外环境,可以提供10m尺度的定位服务,依赖于地面建筑物高度和密度的限制,这个精度可能还会更差一些(小编:主要问题是位置漂移和抖动),但基本面上好于现有的移动通讯网络所能提供的定位能力,且免费。在郊区,精度可以到米级。所以地广人稀的北美公路条件下,车载GPS普通级别的设备就可以到米级,非常适合导航,甚至直接参与自动驾驶的一些控制任务。如果再利用差分基准站修正技术,GNSS甚至可以到分米、厘米级别,深入到许许多多的工业控制、现场监测应用当中去。所以上图4的GNSS定位能力是有弯度的,而且说到此刻我相信大家也都明白这个大势了,地面复杂地貌下的高精度定位,还得仰仗贴近地表的地面无线系统来完成。
ToA在地面通讯网络中不适用的原因
我们前面也提到过,相比于部署在地球轨道上的GNSS卫星定位系统,部署在地球地表的移动通讯系统(小编:也可以统一被称作PLMN=Public Land Mobile Network地面公众移动网络),目前在空中接口上就没有办法提供纳秒级别的同步能力(小编:注意这里是指在无线的空中接口上,也就是基站和终端之间,而不是基站和基站之间,这是有本质差别的)。原因不是做不到,而是不需要。
通讯业务为主的移动网络PLMN里,空中接口的设计非常复杂,设计目标往往不止一个。又要满足终端的多种通讯业务需求,还要保障终端的移动性和低能耗,还要兼顾一定的定位能力……这种复杂性和GPS系统导航电文的单一性,形成了鲜明的对比。发展到目前,我们讨论过的ECID和RFPM的定位方法也算是勉强完成任务,所以为了进一步改进定位能力而在空中接口协议上做出改进,是需要在5G(小编:在R16版本之后针对定位业务确实有了倾向性设计)阶段进行统筹考虑了。
在现有的技术条件下,移动通讯网络内的终端和网络基站之间,只有在开机寻网、注册和发起具体业务的时候才需要通过一个主动的同步过程(小编:包括基础的下行同步和终端主动触发并由网络侧维护的上行同步),来建立“较为严格”的时间维度上的同步关系,需要注意这个“较为严格”的时间同步,参照GPS的时间同步不是一个数量级。而且在终端驻留在网络内的大部分时间内,为了保证移动终端的电源开销,基站和手机终端之间的信令开销首要设计目标还是精简而非面面俱到兼顾定位业务,因此只要定位业务在通讯网络内不属于基础业务范畴,就不可能达到GNSS的定位效果……
即便是在终端和基站之间建立好时间同步关系的状态下,其时间同步性能的服务目标也不是定位业务,或者说不是首要为了定位需求,而是为了降低小区内终端之间的干扰(小编:上行同步)、以及小区之间因为终端移动而发生切换时的业务质量保障(小编:基站之间的同步)。这些业务需求对于时间同步的需求并不高,大概在微秒us级别,这是由4G甚至5G的空中信道格式和结构所决定(小编:你没有看错,5G在通讯业务对于同步需求的这方面和4G没有本质区别);另外不能遗漏的是,在4G和5G阶段,时间同步还新增需要满足载波聚合Carrier Aggregation,或者CoMP多点协同收发的业务需求(小编:这些业务对于时间同步的需求具体还是要高一些,不是微秒us的级别,而是百纳秒的级别,这个同步需求主要是指在基站之间的需求)。读者不必理会这些通讯业才会关注的具体专有词汇,只需要明白这些特殊的通讯业务对于时间同步也有一定需求,即可。
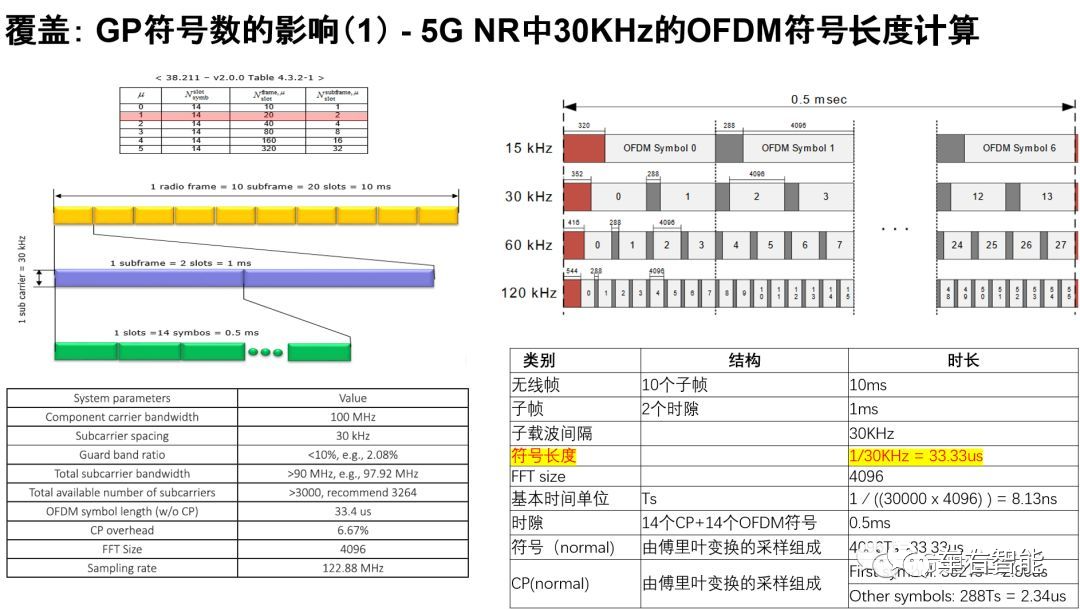
图五【huawei petal map-27.png】来自sohucs.com,URLhttp://5b0988e595225.cdn.sohucs.com/images/20180809/c29ee91a1a4443a0bb12c07f31c96a73.jpeg;
关于上图5,读者不需要认真研究,贴在这里只是为了让大家直观感受一下5G New Radio NR的空中接口在时间上的尺度标准。看右上角,当子载波宽度选择30KHz时,1个subframe中的1个时隙timeslot的长度是0.5ms毫秒,其内部的14个OFDM符号尺度大约是33.3us微秒。读者只需要了解到这里就可以了。这也就意味着,如果仅从通讯业务的需求出发来考虑NR对于时间同步的需求,那么基本就是毫秒最多微秒尺度,到OFDM符号体量这个尺度就足够了(小编:准确说就是不超过CP循环前缀的时间长度即可保证通讯业务)。这就可以保证精确和完善的数据及话音、多媒体业务的传递顺畅了。但是这个时间尺度用于ToA进行终端到基站的伪距测量和终端定位,则远远不够。
业务需求决定系统性能
所以在遍历讨论了GNSS、移动通讯系统和室内无线系统的定位性能之后,我们不难得出一个初步的结论,“业务需求决定系统性能”应该是人类进入工业化之后的一个必要活动准则。这个准则在PLMN通讯系统的设计中体现得淋漓尽致。不考虑业务和性能的匹配性,而在性能和业务设计上过分超前的系统难逃逐一被现实挫败的厄运。一如当年的ATM被Ethernet从桌面淘汰;WiMAX在北美干不过CDMA的EVDO,在亚欧大陆干不过WCDMA……单一的技术优势很多时候都无法转化为胜势,市场这个巨大的技术筛选器有其自主的生存法则。
对于移动通讯系统来说,首要目标是要在地表尽可能建立一张无缝覆盖人类活动区域的话音和数据网络(小编:所谓的基础业务),满足人类在静止与移动场景下的不间断业务获取能力。3GPP的代际技术发展虽然从未停止,但这些基础业务对于性能的更高要求也从未停止。在5G时代,虽然业务能力的增强导致最基础的物理帧结构变得更加精密,但满足这部分所必须的时间同步需求,还是停留在微秒级别,大致是+-1.5us,和前代4G LTE并没有本质差别。
在网络侧,基站和基站之间的时间同步性是依赖链接基站的有线网络,比如传统的光传输网络或者电信以太网来实现同步机制的(小编:以太网上由IEEE1588来实现时间同步、光传输网络有其他底层方式来提供时间同步机制;这些内容也超越本篇文章的技术范畴,不做深究)甚至也可以依赖在每个基站站址上安装的GPS、北斗GNSS同步系统来获取纳秒级别的同步定时,以在更好的程度上满足进入4G和5G时代以来,载波聚合CA、协同多点收发CoMP和高速漫游等业务的需求。在这个网络侧的时间同步性能的进步(小编:注意不是网络侧和终端侧之间空中接口上的同步性能提升)间接对基于移动网络的定位性能演进是有帮助的。
这就是我们后续要谈到的图1中的绿色圈,TDoA技术所依赖的技术基础——网络侧时间同步。ToA虽然不能搞,但TDoA还是有希望的…..
编辑:黄飞
-
UWB定位技术之定位算法:RSS、AOA、TOA、TDOA2019-06-28 0
-
什么是TDOA定位技术?有什么实际应用?2019-08-09 0
-
基于RSSI的定位技术进行了研究2020-08-28 0
-
小编带你解开UWB定位技术的神秘面纱2023-05-12 0
-
基于遗传算法和模拟退火算法的TDOA定位技术2009-04-20 695
-
体内胶囊TDoA定位算法研究与仿真2010-01-18 872
-
基于GDOP加权的TOA/2FAOA混合定位算法2018-02-12 1453
-
TDOA 定位技术和实际应用简介2018-05-05 41507
-
UWB定位技术的TDOA如何保证时间同步2019-06-06 1825
-
从2G到5G,蜂窝网络定位技术的发展史2020-11-06 8716
-
解析TDOA定位算法中的时钟同步2021-09-26 10380
-
采用UWB和TDoA技术的定位标签源码2021-09-22 959
-
TDOA 定位技术及原理介绍2022-12-22 12938
-
UWB室内定位系统TDOA算法方案介绍2023-03-08 1126
-
基于UWB模块TDoA定位和PDoA定位应用讲解2023-12-01 1159
全部0条评论

快来发表一下你的评论吧 !
