

简单介绍基于CAN-FD的诊断通信传输层
接口/总线/驱动
描述
我曾经写过一篇《基于CAN总线实现的UDS诊断》基于CAN总线实现的UDS诊断(DoCAN),那篇文章中介绍了在CAN总线上实现诊断通信的机制。
随着汽车功能越来越丰富,对总线传输能力的要求也进一步提高,CAN总线的升级版本CAN-FD逐渐部署到了量产车辆上。
基于CAN-FD和CAN的诊断通信机制基本没差别,但是仍然有一些细节上的变化。本篇文章将简单介绍基于CAN-FD的诊断通信传输层相比于CAN的变化。
CAN-FD是CAN withFlexible Data-Rate的简称,从名称可以看出,CAN-FD的数据速率是可变的。
CAN-FD继承了CAN2.0的主要特性,物理层改动较小,仍然具备CAN所拥有的双绞线串行通信、非破坏性仲裁等机制。
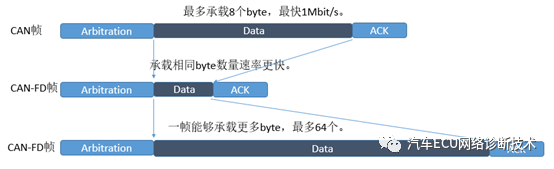
在CAN2.0中,CAN帧的判决域和数据域的波特率是相同且固定的,最高为1M。
但是CAN-FD帧的判决域和数据域的波特率不相同,前者仍然是最高为1M,但是后者可以达到8M。在CAN2.0中,一个CAN帧的数据域最长为8个字节,但是这一数字在CAN-FD中提高到了64。
下图简单展示了CAN-FD相对于CAN的优势。
比如,在CAN-FD数据域波特率 = 8M,CAN数据域波特率 = 1M的情况下,同样在数据帧中承载8个字节,CAN-FD数据域时长仅为CAN数据域时长的八分之一;在数据域时长相同的情况下,CAN-FD数据域中承载的字节数量是CAN数据域的8倍。
一个CAN-FD帧的数据域中可能存在的字节数量为1-8, 12, 16, 20, 24, 32, 48 ,64。数据长度由帧格式中的DLC字段决定。
在DLC从0到8时,DL(数据长度)值也是从0到8逐渐加1增长。但是对于DLC大于8的情况,CAN将所有DL都当作8处理,CAN-FD的DL与DLC的对照关系如下表所示。
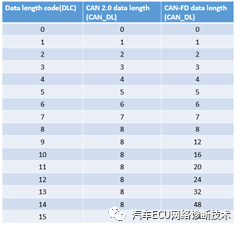
DLC与DL的对照表
下图展示了CAN与CAN-FD帧上存在的一些不同。
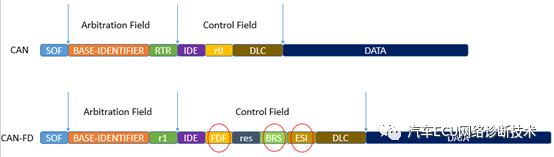
与CAN相比,CAN-FD的帧中多出了以下3个字段。
FDF(FD FormatIndicator):Dominant (0) = CAN Frame, Recessive (1) = CAN FD Frame;
BRS(Bit RateSwitch):Dominant (0) = 数据域速率不变,与判决域速率相同;Recessive (1) = 数据域速率提升;
ESI(Error StateIndicator):Dominant (0) = CAN FD 节点处于主动报错状态, Recessive(1)= CAN FD节点处于被动报错状态。
当BRS位为隐性时,从ESI位开始一直到CRC域结束,都采用变化后的速率。
值得注意的是,CANFD 节点可以正常收发传统CAN 节点报文,但是传统 CAN 节点不能正常收发 CANFD 节点的报文。
在《基于CAN总线实现的UDS诊断》一文中提到,基于CAN总线的诊断传输层总共定义了4种帧,即SingleFrame、FirstFrame、ConsecutiveFrame、FlowControl。
基于CAN-FD总线的诊断传输层也使用这4种帧,但不同之处在于,因为每帧承载的数据量更大,所以SingleFrame和FirstFrame有两种情况,下图展示了这两种情况。
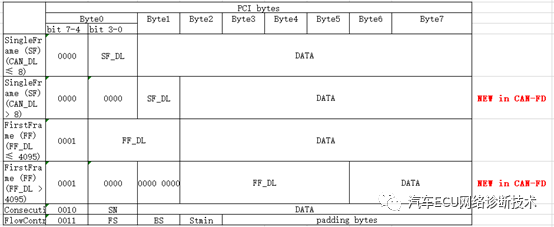
在CAN-FD中诊断通信传输层的SingleFrame和FirstFrame的变化
因为CAN-FD一帧可以承载的字节数最大为64,所以传统CAN中用4个bit来表示SF_DL就不够用了,当我们构造的单帧长度大于8个字节时,CAN-FD使用Byte1来指示SF_DL。
同理,当一个需要分包的数据过大,导致FF_DL需要大于4095时,那么在传统CAN中用于表示FF_DL的12个bit就不够了,在这种情况下FirstFrame的格式要根据上图发生变化。
下图展示了针对不同SF_DL应该选择的DLC和DL。

审核编辑:刘清
-
CAN FD协议介绍2021-08-20 0
-
CAN-FD协议你了解多少2021-08-19 0
-
一文浅析汽车CAN-FD总线的通信应用2023-02-14 0
-
多核异构-双核高速率CAN-FD评测2023-02-17 0
-
是否有任何外部组件可以使ESP32S3与CAN-FD兼容?2023-03-02 0
-
[原创] MicrochipCAN LIN CAN-FD汽车网络开发方案2018-05-19 3237
-
你知道CAN-FD协议有多少?2018-07-09 11217
-
工业CAN2.0及CAN-FD隔离器及共模干扰抑制模组2019-01-17 5319
-
CAN-FD协议你了解多少 ?2020-03-08 16624
-
DS70000系列数字示波器在CAN-FD协议解码上的应用2022-03-25 2593
-
STM32设备上的CAN FD2022-08-28 699
-
CAN与CAN-FD主要区别概述2022-11-21 46187
-
车载CAN-FD的抗扰度评估技术2022-12-14 1394
-
应用指南—如何使用DSLogic分析CAN/CAN-FD信号?2023-09-04 1986
-
如何使用DSLogic分析CAN/CAN-FD 信号?2024-01-08 1349
全部0条评论

快来发表一下你的评论吧 !
