

压电微驱动技术应用于微纳米操作系统/机器人
今日头条
描述
微纳米操作系统/机器人一般又可称为纳米操作手、纳米机械手、纳米操纵器等,它的特点是对微小尺寸的对象进行微纳米级运动控制操作和处理。在当前科技快速发展的当下,具有非常广泛的应用场景,如微系统(MEMS)、分子操作、DNA测序、兆亿容量存储器等,这些都会需要微纳操作系统。
微纳米操作系统/机器人要求非常高的运动控制精度,通常由显微视觉、驱动、传感和控制等组成,各部分间闭环回路配合,才能完成微纳米级精度的操作控制动作。这种动作有抓、提、移动、放置等。
而微纳米操作系统/机器人具有非常多的种类,例如基于光学显微镜的微纳操作系统、SEM基于扫描电子显微镜的微纳操作系统,以及SPM基于扫描探针显微镜的微纳操作系统,还有更多其他类型的微纳操作系统。微纳米操作系统/机器人也通常采用显微镜对操作过程进行观察和实况了解。
维纳操作器
在微纳米操作系统/机器人中,有一个非常重要的组成部分,叫微纳操作器。微纳操作器就是在微纳米操作系统/机器人中进行指定动作的执行器,这个执行器需要提供微纳米级的运动精度。
一提到微纳米级运动控制精度的执行器,芯明天压电纳米运动与控制系统产品自然是该微纳执行器的主要选择。
芯明天压电纳米运动与控制系统以精度高、响应速度快著称,在各种微纳米级操作系统中得到非常广泛的应用,在现代科学技术领域也具有广阔的应用前景。
芯明天六自由度并联机构用于样品姿态控制
在微纳米操作系统/机器人中,经常需要改变对象、样品等的位姿,包括运动范围、运动精度以及运动的直线距离、角度范围等的调整,并且这些调整的运动精度是非常高的,直线型调节需达到纳米级精度,而角度运动通常达到微弧度甚至纳弧度的精度。
针对这种应用需求,芯明天研发设计生产了H60六自由度并联机构运动平台。该并联机构运动平台是通过六支压电促动器进行并联驱动的,每支压电促动器的运动精度都在纳米量级。可通过更换压电促动器的型号来增加(或缩小)该六自由度并联机构的运动范围、运动精度、承载能力等性能。
通过六支压电促动器的并联配合,可将安装至上表面的对象或样品进行任意姿态的调节。
H60六自由度并联机构运动平台的实测参数如下。
| 运动轴 | 运动范围 | 分辨率 | 线性度 | 重复度 |
| X向 | 40μm | 优于0.5nm | 优于0.1% | 优于0.1% |
| Y向 | 40μm | 优于0.5nm | 优于0.1% | 优于0.1% |
| Z向 | 55μm | 优于0.5nm | 优于0.1% | 优于0.1% |
| θx向 | 1.2mrad | 优于0.5μrad | 优于0.1% | 优于0.1% |
| θy向 | 1.2mrad | 优于0.5μrad | 优于0.1% | 优于0.1% |
| θz向 | 1.6mrad | 优于0.5μrad | 优于0.1% | 优于0.1% |
芯明天压电马达及压电纳米定位台应用于光纤对接
行业人士对光纤对接都非常了解,光纤对接的准确度、精度都会对最终光的传输产生非常重要的影响。光纤对接是光纤传感、光纤通讯等应用中重要的微纳操作过程。
光纤的芯径通常非常小,约在微米量级,因此将两条光纤进行对准的操作就需要非常高的精度,一般达微纳米量级。通过人员手动操作时,会要求非常有经验的人员,且非常耗时。而采用微纳米操作系统机器人,不仅可保证精度,且可大幅缩短对接时间,提高了生产效率,同时保持质量。
芯明天三维压电马达平台及三维柔性挠曲压电纳米定位台可为微纳米操作系统机器人提供光纤的粗精调对准,粗调行程在100mm范围内自由选择,精调行程在几百微米范围内可选,且精度参数可选。

XYZ三维粗调,毫米行程 XYZ三维精调,微米行程
| 运动轴 | 运动范围 | 分辨率 | ||
| 粗调 | 微调 | 粗调 | 微调 | |
| X向 | 0~100mm | 0~1000μm | <50nm | 0.1~20nm |
| Y向 | 0~100mm | 0~1000μm | <50nm | 0.1~20nm |
| Z向 | 0~100mm | 0~1000μm | <50nm | 0.1~20nm |
芯明天压电螺钉直线促动器应用于探针控制、操作手
压电螺钉是利用粘滑原理,将移动螺纹杆逐步推动旋转前进。该驱动的步进都是通过高精度压电陶瓷驱动,可保证每一步进的纳米级精度。压电螺钉不仅具有高精度,它的行程也很大,可达26mm甚至以上。它可在纳米操作应用中进行大行程、高精度的探针或机械臂调节。并且,可利用多个压电螺钉配合组成结构,形成6维甚至更多维度的探针或机械臂进行纳米运动调节。
| 型号 | 运动范围 | 最小步长 | 运动速度 | 负载能力 |
| N81.8K | 8mm | <20nm | 3mm/min | 25N |
| N81.13K | 13mm | <20nm | 3mm/min | 25N |
| N81.26K | 26mm | <20nm | 3mm/min | 25N |
在真空等特殊腔体内,纳米运动控制更是无法用手触碰的。芯明天可提供真空版本压电螺钉直线促动器,兼容真空环境,完成在真空腔内的单轴或多轴探针、操作手及机械臂的纳米操作。

芯明天压电纳米定位台/压电钳应用于微夹持
微纳米操作系统机器人一般在高倍率、高分辨率的监视装置下操作,视野范围非常小。在这么小的视野范围内进行任意的操作都需要具有微小物把持和放置的能力。有些情况会利用吸附(如采用静电力、表面张力等)进行把持,但脱离操作较难。因此微纳米操作夹钳成为优选。
芯明天压电钳/线夹是对微米级引线进行夹持与放开操作的非常适合的工具,可对微米量级的金线、铜线、银线等进行夹持与放开动作,非常适用于自动化集成威廉希尔官方网站 生产设备等。
为了更加灵活的操作,可采用芯明天压电纳米定位台配合探针,两者间经过合适的适配连接,使得压电纳米定位台本身的纳米级运动转为对探针的纳米级运动控制,从而获得高分辨率的运动能力。
芯明天可为您定制设计纳米操作的解决方案。
芯明天压电物镜定位器应用于视觉Z向聚焦、光镊
在微纳米操作机器人系统中,其中会有视觉观察、光学操纵等操作,例如对物体进行原子和分子操作及其他操作,通常需要对光进行高精度的聚焦与XYZ向的多维移动控制。
光学的Z向纳米级聚焦、精调,可通过芯明天压电物镜定位器进行调节,调节分辨率可达纳米甚至亚纳米量级。

芯明天压电物镜定位器
芯明天压电物镜定位器基本参数:
| 型号 | Z向行程 | 分辨率 | 承载能力 |
| P72.Z100 | 100μm | 1nm | 0.2kg |
| P73.Z200 | 200μm | 2nm | 0.2kg |
| P73.Z500 | 500μm | 4nm | 0.4kg |
| P73.Z1000 | 1000μm | 8nm | 0.2kg |
| P76.Z50 | 75μm | 1nm | 0.5kg |
| P76.Z50A | 50μm | 0.5nm | 0.5kg |
| P76.Z100 | 100μm | 1nm | 0.5kg |
| P76.Z200 | 200μm | 2nm | 0.5kg |
| XD730.400 | 400μm | 4nm | 0.5kg |
| XD730.500 | 500μm | 5nm | 0.5kg |
| XP-721 | 100μm | 1nm | 0.2kg |
而对光的平面二维调节,可采用芯明天二维或三维压电扫描台,它具有中心通孔设计,适用于透射光应用,可带载光源或光学元件进行多维纳米运动,完成光目标位置的调节。

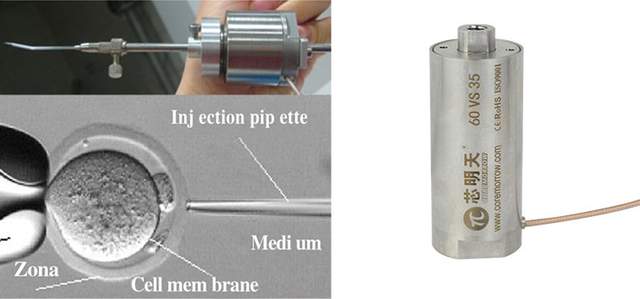
芯明天直线压电促动器应用于破膜仪、细胞穿透
对薄膜进行穿透或对细胞进行药物注射时,若操作不够精细,很容易对薄膜或细胞造成损坏。因此,通常采用高运动精度的压电促动器来解决该问题。
通过压电促动器的高频微纳米级振动,来完成薄膜的穿透或穿孔,从而进行下一步的药物注射等操作。压电促动器可显著提高操作精度和成功率,从而保证实验的准确和顺利进行。
芯明天压电促动器具有上百种型号,以下仅为其中几个型号的基本参数。
| 型号 | Z向行程 | 空载谐振频率 | 外径 |
| PSt150/4/7 VS9 | 9μm | 40kHz | 9mm |
| PSt150/4/20 VS9 | 19μm | 30kHz | 9mm |
| PSt150/5/7 VS10 | 9μm | 40kHz | 10mm |
| PSt150/5/20 VS10 | 19μm | 30kHz | 10mm |
| ... | ... | ... | ... |
| PSt150/7/7 VS12 | 9μm | 40kHz | 12mm |
| PSt150/7/20 VS12 | 19μm | 30kHz | 12mm |
| PSt150/7/40 VS12 | 38μm | 20kHz | 12mm |
| ... | ... | ... | ... |
| PSt150/10/100 VS15 | 95μm | 10kHz | 15mm |
| ... | ... | ... | ... |
结语
芯明天压电纳米运动与控制产品在微纳米操作系统中的应用,远不止以上这些,会随着应用环境的不同而发生复杂及多样的变化。不同的应用环境下,对微纳操作的要求也是不同的,因此,微纳操作系统的种类也是非常多样的。为了找到完全匹配应用中需要的微纳操作器的参数及结构要求,定制化选择是理想的。
芯明天具有近二十年的定制设计经验,期待与您的沟通交流。
审核编辑 黄昊宇
- 相关推荐
- 机器人
-
机器人操作系统浅析2016-09-28 0
-
智能扫地机器人解决方案2017-05-27 0
-
机器人主控操作系统2017-12-25 0
-
工业机器人结构、驱动及技术指标详解2018-10-12 0
-
工业机器人的技术原理2018-11-23 0
-
入门必备的机器人操作系统2019-06-11 0
-
求用于机器人的控制方面的操作系统??2019-06-12 0
-
机器人群控系统应用于两种机器人队形变换2019-06-27 0
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 0
-
机器人操作系统ROS详细介绍2018-11-18 2389
-
机器人操作系统入门课程讲义资料免费下载2019-10-09 843
-
可肿瘤诊断与治疗的微纳机器人2020-03-21 2247
-
微纳操作系统中微动压电钳的特点以及技术参数2020-08-23 595
-
基于鸿道(Intewell®)操作系统研发的农业机器人操作系统2024-04-30 428
-
安泰功率放大器应用:微纳米操作系统2024-10-28 182
全部0条评论

快来发表一下你的评论吧 !
