

Lidar BA方案在后端部分的差异对比
电子说
1.3w人已加入
描述
近几年点云 slam 领域有一类文章不满足于仅估计 pose graph。尝试类似视觉 slam 中的 ba 方法,其致力于同时估计 feature 和 pose。本文内容上仅对比了这些方案在后端部分的差异,但是数据关联可能是在该类方案中更为重要的问题。
PART. 01
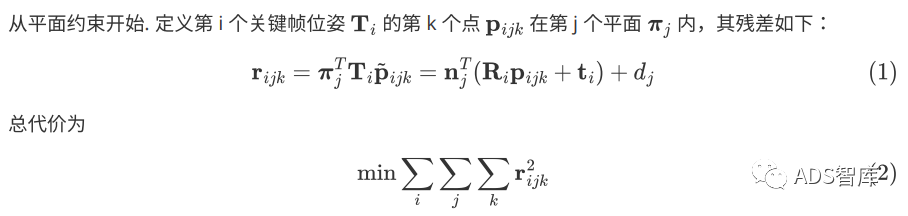
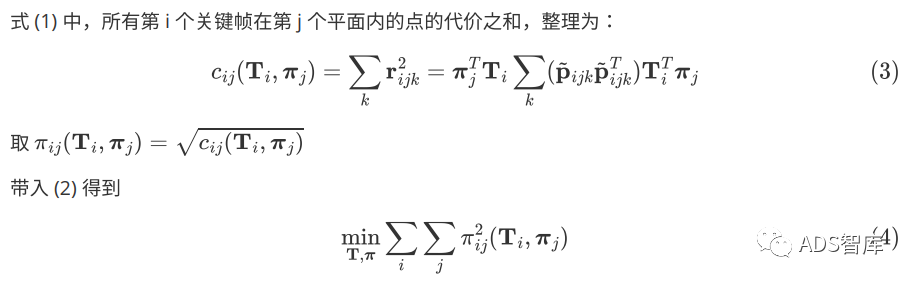
π - LSAM(2021)[3]
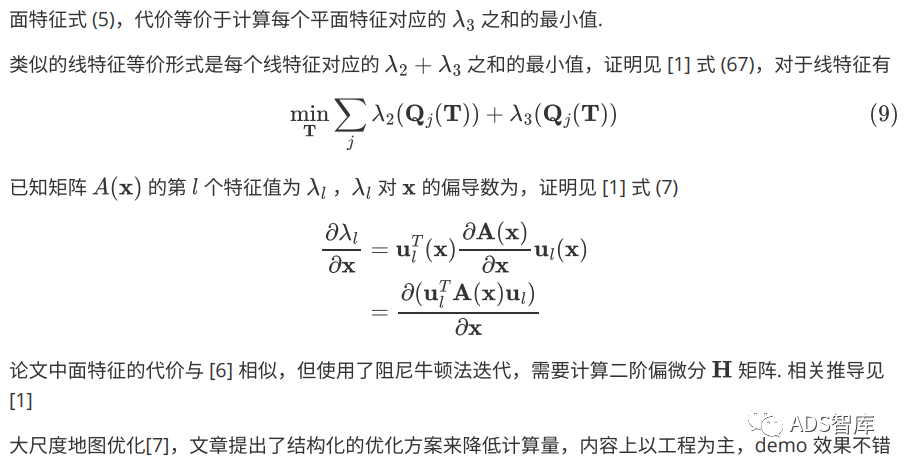
PART. 02 Eigen Factors(2019)[6] 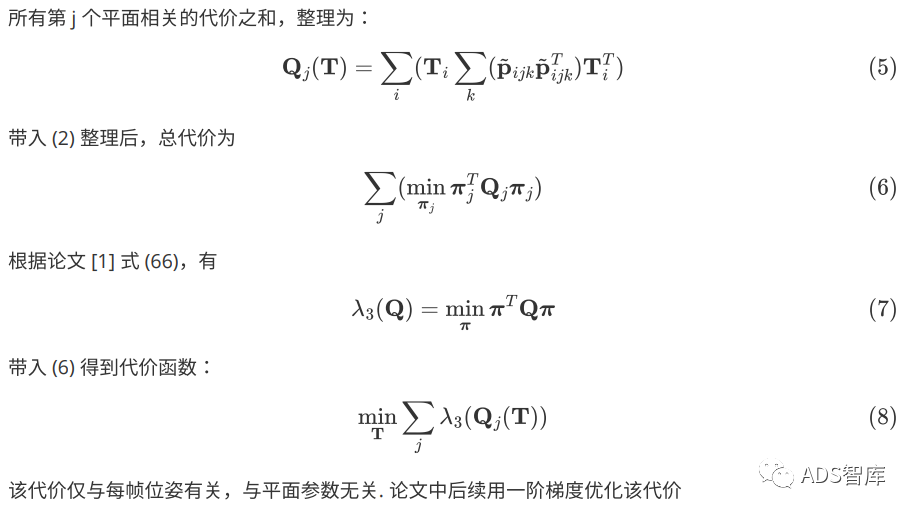
PART. 03 BALM(2020,2022)[1,2,7]
PART. 04
Plane Adjustment(2020,2021)[4,5]
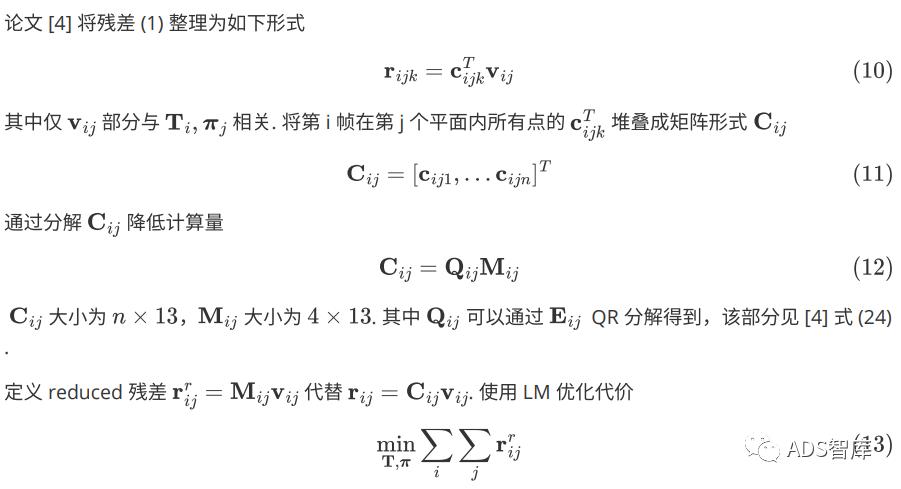
论文 [5] 考虑滑动窗口下的估计,其增加了边缘化部分的约束,未边缘化部分代价同 (13) 。
窗口外的约束的 pose 固定,但边缘化部分约束仍对 plane 参数求偏导。文中推导了每个 plane 对应边缘化部分的 reduced 残差,该残差对平面参数的导数可以通过增量计算 Hj 后 cholesky 分解得到。
该论文中对比了 BALM。因将墙体、门等平面两侧视为两个平面进行优化,减少了错误的数据关联,在某些数据集上优于 BALM。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- SLAM
-
图表对比蓝牙标准4.0和4.1的差异2016-02-29 0
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 0
-
LIDAR与RADAR在自动驾驶汽车中的比较2018-10-30 0
-
Compare Designs就可以开启DSN设计差异对比的功能2020-07-06 0
-
实现“三重视野” – LiDAR技术实现安全驾驶2020-08-20 0
-
请问LIDAR感知挑战有哪些?2021-06-17 0
-
LIDAR原型制作平台如何建立算法和自定义硬件解决方案的原型?2021-06-17 0
-
什么是后端?2021-06-23 0
-
【Altium小课专题 第184篇】AD如何进行原理图差异对比?2021-09-06 0
-
TIA威廉希尔官方网站 在后端加滤波器的时候看到方波变形的情况怎么解决?2023-11-15 0
-
数字后端基本概念介绍2018-03-16 23253
-
固态LiDAR与机械LiDAR该如何选择2018-05-16 6394
-
LeddarTech和ST合作开发基于LeddarEngine技术的LiDAR解决方案2020-06-02 2265
-
详谈SDRAM内存模组与差异对比2020-09-15 2412
-
ChatGPT在后端设计中有什么应用?2023-03-07 1550
全部0条评论

快来发表一下你的评论吧 !
