
资料下载


自主紫外线机器人
张勇
分享资料个
描述
介绍
COVID-19 大流行以多种方式影响着我们。这实际上使我们的世界陷入了停顿。但是,为了防止社区传播,保持社交距离是绝对必要和重要的。在这个项目中,我们试图解决人群聚集的问题,这将为大流行的社区传播创造有利条件。参考 Covid19 非常成功的#KeralaModel,社交距离和遏制是帮助拉平曲线的主要因素之一。
动机
我们的动力来自美光计划实现的目标。参考比赛描述,随着第一波 COVID-19 影响全球每个人口,我们学到了许多与传播和预防有关的新知识。我们更有能力应对持续的大流行病,需要可持续的低成本解决方案,以提供安全、预防性、有效的方法来保护工作场所、购物区、医疗机构等场所的人们。紫外线技术是减少接触的一种方法可能有病毒或细菌的表面,也不需要人为干预来清洁这些表面。
工作流程
我们的项目旨在开发一种能够自主或半自主地穿越房间、避开任何障碍物并对其进行消毒的自主机器人。该机器人是一种能够手动或自主穿越的地形微型车辆。该车辆可以是任何典型的 RC 地面车辆,最好带有有刷直流电机,由 ESC 控制。这种类型的最好例子是驴车。驴车的优势在于它通过Raspberry Pi 3具有自主能力,这是通过训练汽车来实现的。有关设置汽车、训练和制作经过训练的模型,请参阅此处的独家官方指南。
硬件实现
开发了两个原型。第一个原型使用此处提供的 Rock Crawler 遥控车套件,第二个原型使用此处提供的驴车套件(HSP 94186 拉丝遥控车)。
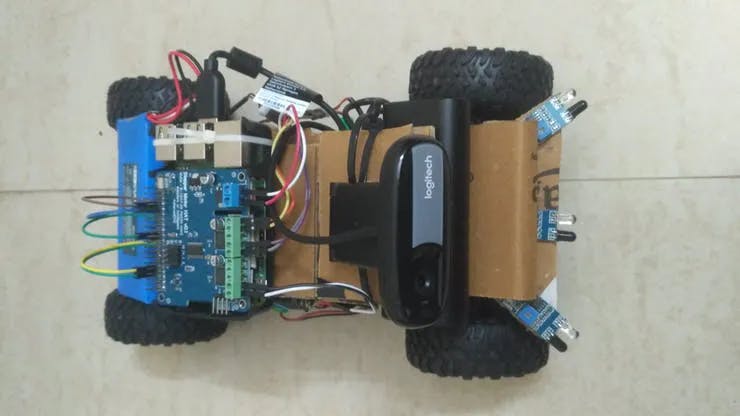
驴车套件随附的 PCA9685 PWM 驱动器足以驱动其随附的所有伺服器和电机。但是,如果您打算连接更多传感器或执行器,我建议您使用我们使用过的类似这样的 Raspberry Shield,可在此处获得。
附有U-Blox Neo-6M GPS(链接),可提供汽车的本地位置。本文档中提供了 GPS 与 Raspberry Pi 3 的接口。GPS 和基于指南针的自主导航将在以后集成。
我们附加了几个传感器,例如用于图像处理的高清摄像头和用于避障的 IR、SONAR。驱动多个 SONAR 比 IR 更乏味。因此,建议在短期内使用 IR。
必须为 Raspberry Pi 和电机组件提供单独的电源单元。这是为了避免电机噪音进入电源,导致不稳定。不过,两者应该有共同点。
地面车辆还配备了可选的太阳能电池板电池和自动太阳能电池充电威廉希尔官方网站 ,以实现无缝和延长运行时间,从而可以在旅途中充电。
软件实施
开发了一个 python 程序,用于根据自主或半自主条件向地面车辆发出自定义命令。该程序在板载树莓派上运行,并使用电机驱动器控制车辆。
它还可以控制可以安装摄像机的云台伺服系统。
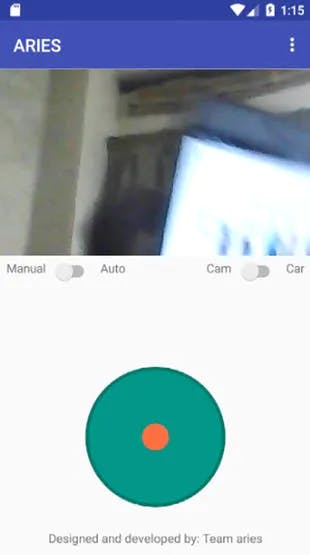
使用定制开发的移动应用程序实现机器人的手动控制。它还提供来自车载高清摄像头的实时摄像头馈送。更多细节可以从编码部分获得。该应用程序允许手动和自动操作地面车辆。手动控制是通过应用程序中实现的虚拟操纵杆执行的,自动操作是通过 python 程序操作各种板载传感器来避障。
使用立体视觉避免碰撞 [正在进行中]
定制立体摄像头由两个 Microsoft HD 网络摄像头制成并经过校准。
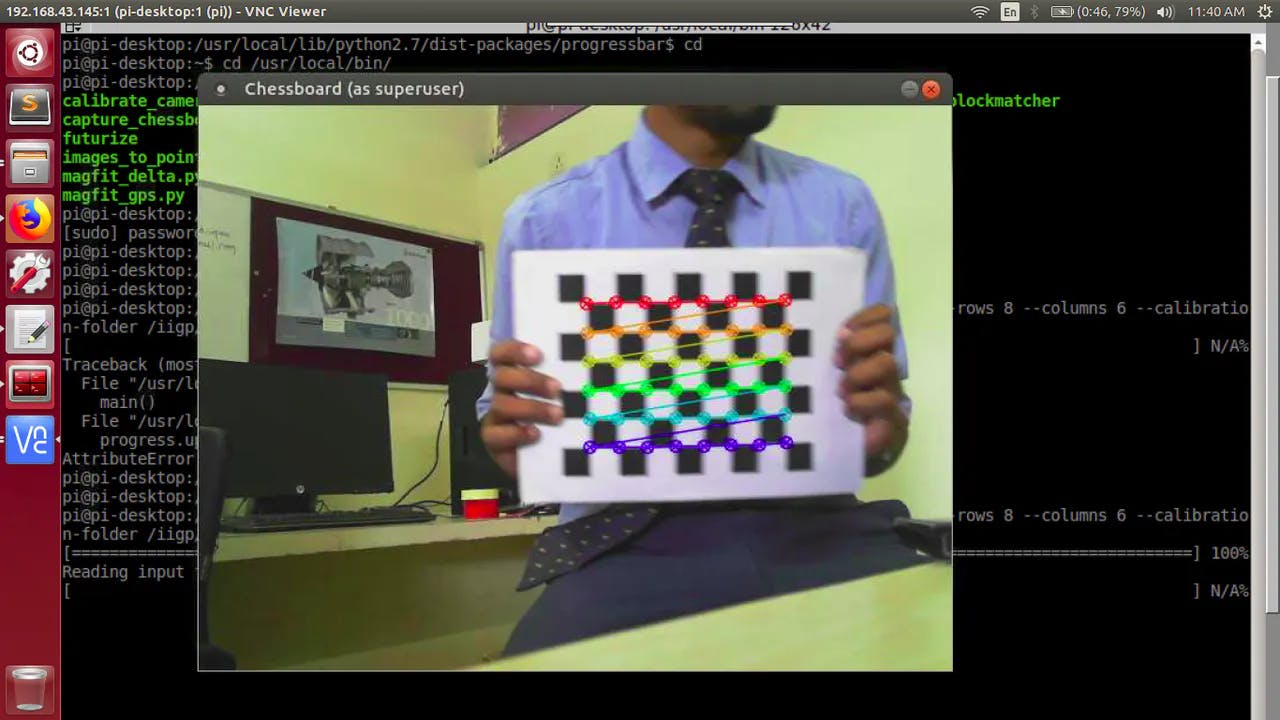

进行视差映射以制定场景的深度,从而检测障碍物。

使用红外传感器避免碰撞
机器人上安装了 3 个红外传感器,用于检测障碍物和避免碰撞。数据被包装到 ROS 消息中以便于分析。
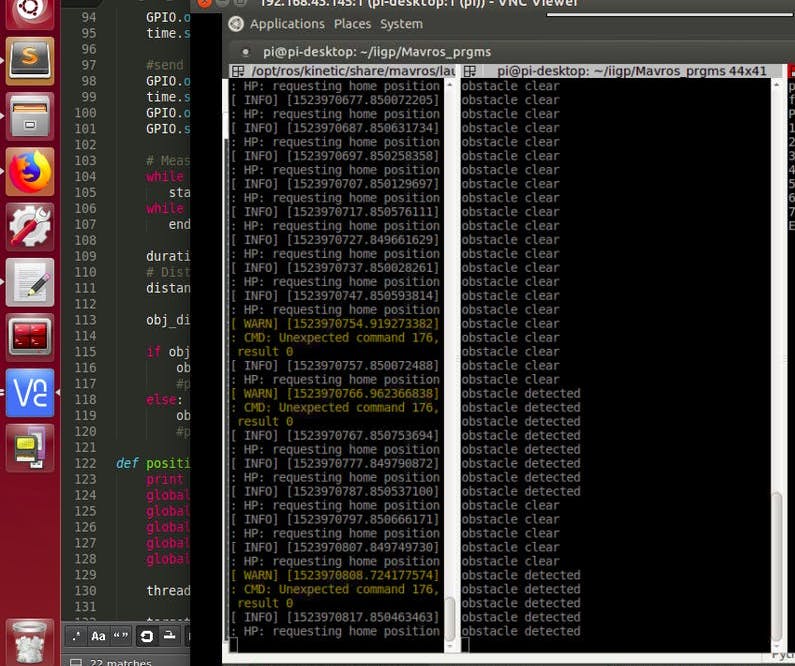
规避算法
规避算法是在 ROS 环境中进行的。在此通过适当的驾驶命令以避开障碍物。可以在此处使用适当的插件,以便将其扩展到任何自动驾驶汽车。
紫外线消毒
适当的紫外线消毒模块可以安装在机器人上,可用于对整个房间进行消毒,无需任何人工干预。
结论
将来可以进一步修改机器人以适应各种其他模块。由于该框架是基于 ROS 的,因此集成会更容易。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




