

基于单片机的定时器PWM呼吸灯和心跳灯实现
描述
5.1 原理图分析
查看EK-RA6M4的原理图,如下图所示,该开发板上有3个Led指示灯。
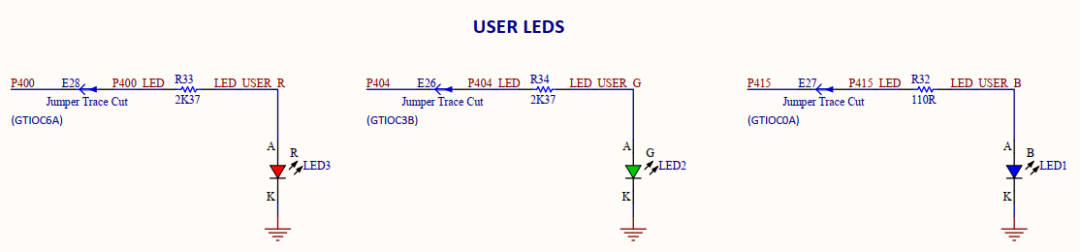
另外,这三个Led灯所使用的GPIO引脚可以作为定时器的PWM输出使用,其定义如下:
| Led灯 | LED3 | LED2 | LED1 |
|---|---|---|---|
| 颜色 | 红色 | 绿色 | 蓝色 |
| 引脚 | P400 | P404 | P415 |
| 定时器 | GPT6(GTIOC6A) | GPT3(GTIOC3B) | GPT0(GTIOC0A) |
在该例程中,我们将通过定时器PWM控制:
- 蓝色Led将作为心跳灯使用(每隔3.4s,快闪2次200ms);
- 绿色Led将作为呼吸灯使用(100%~0%占空比);
5.2 PWM配置
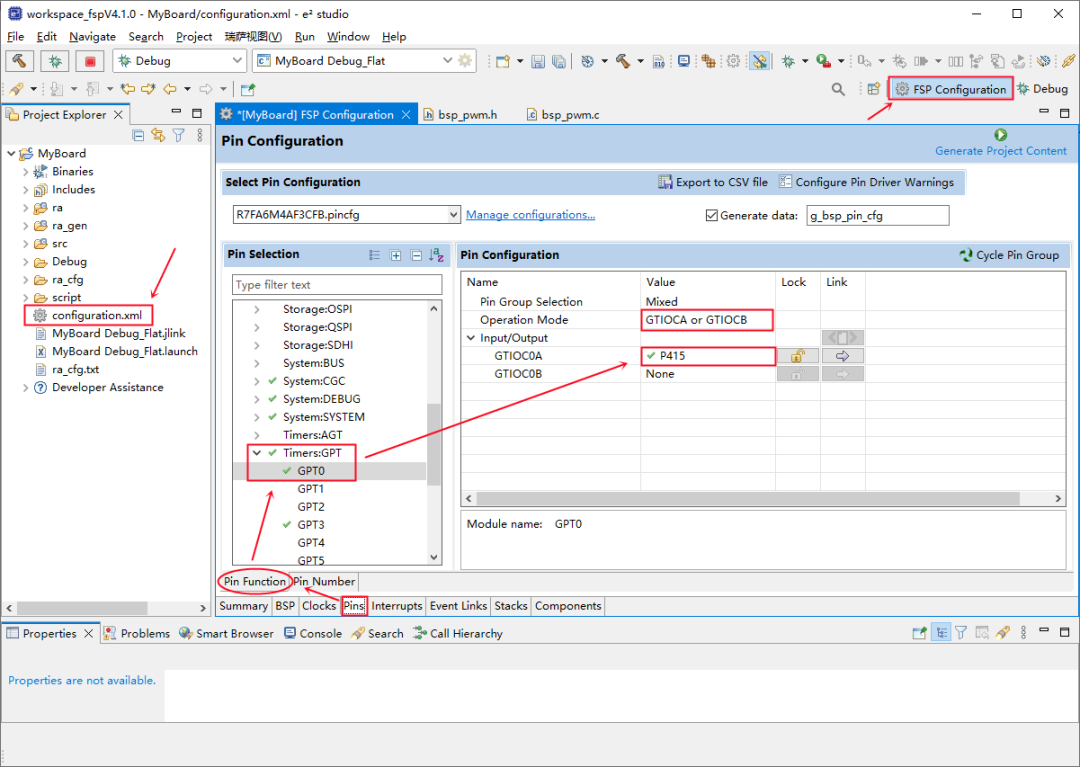
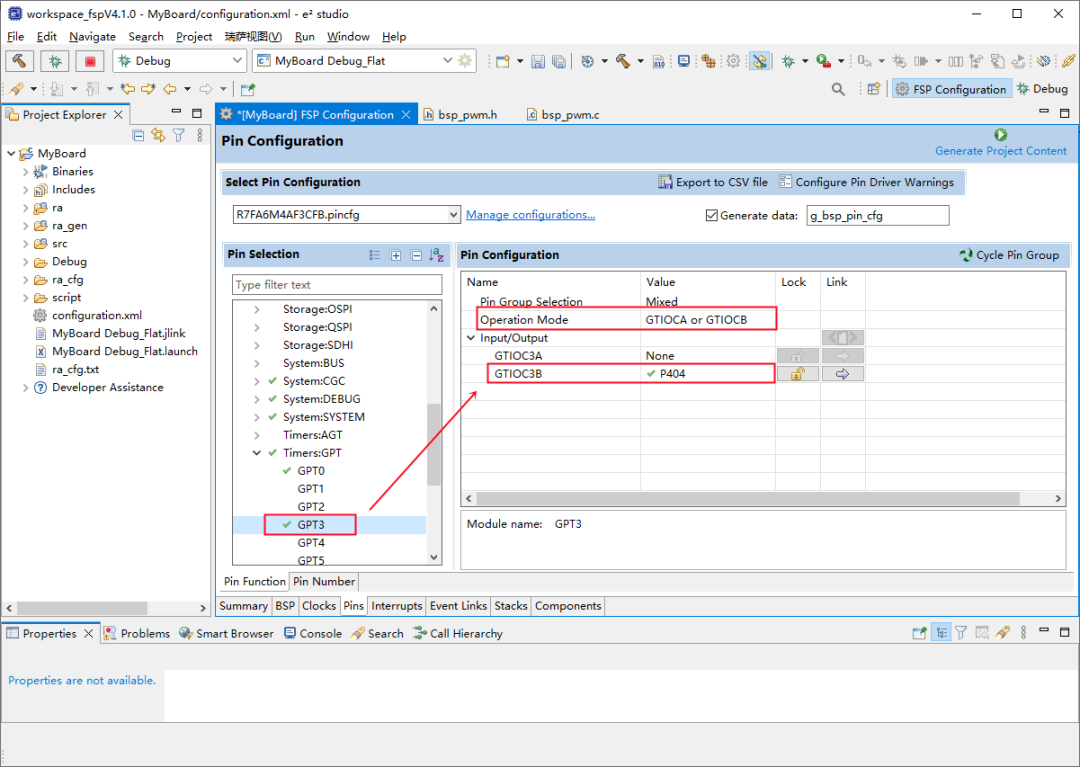
首先,在FSP配置中将 BlueLed 和 GreenLed 所用的两个GPIO口配置成PWM输出模式。
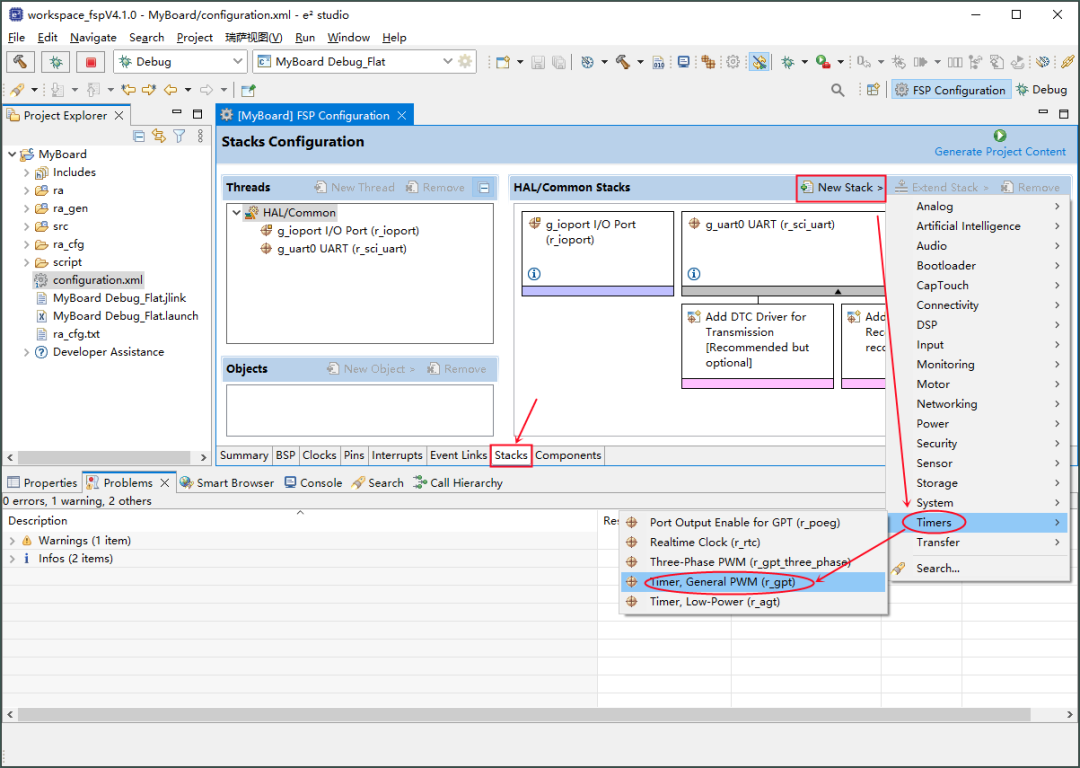
接着选择 Stacks ,点击 "New Stack" -> "Timers" -> "Timer, General PWM(r_gpt)" 添加两个Timer PWM协议栈。
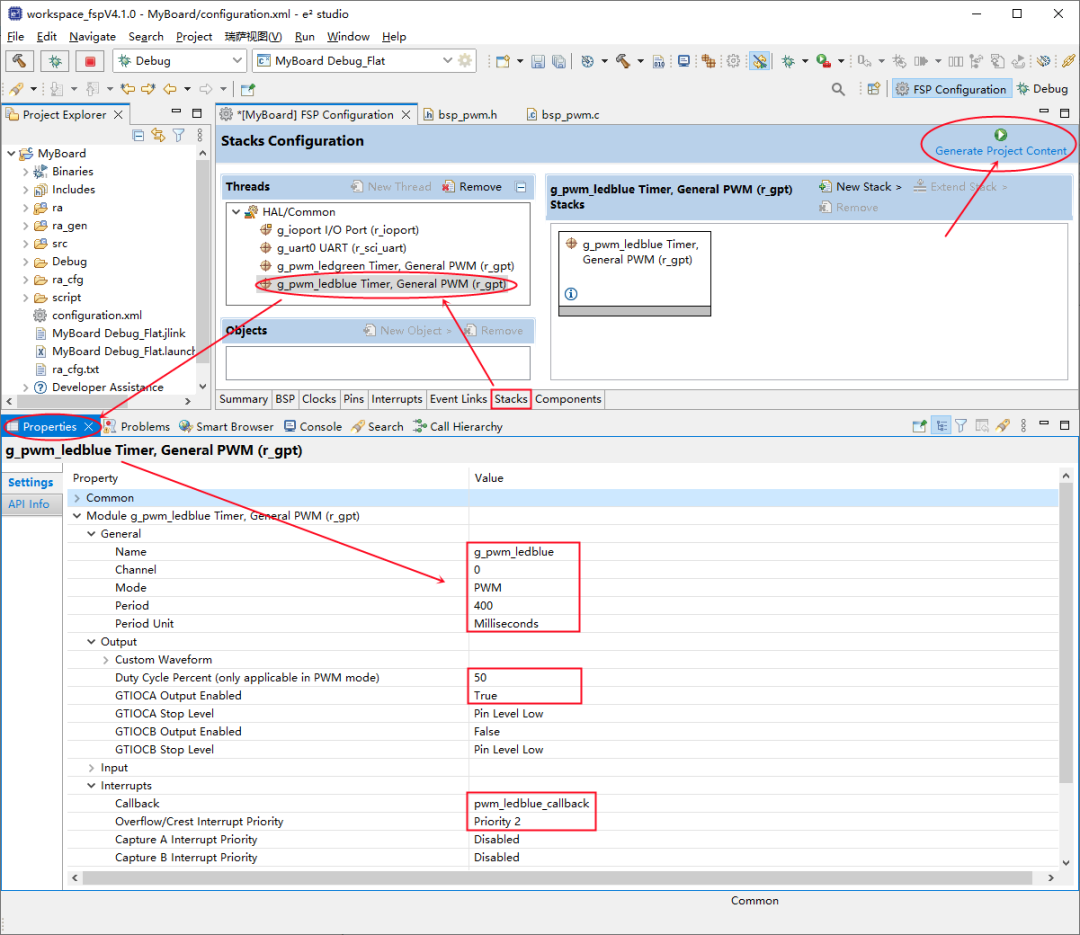
接下来设置 PWM 的相关配置,并重新生成代码。
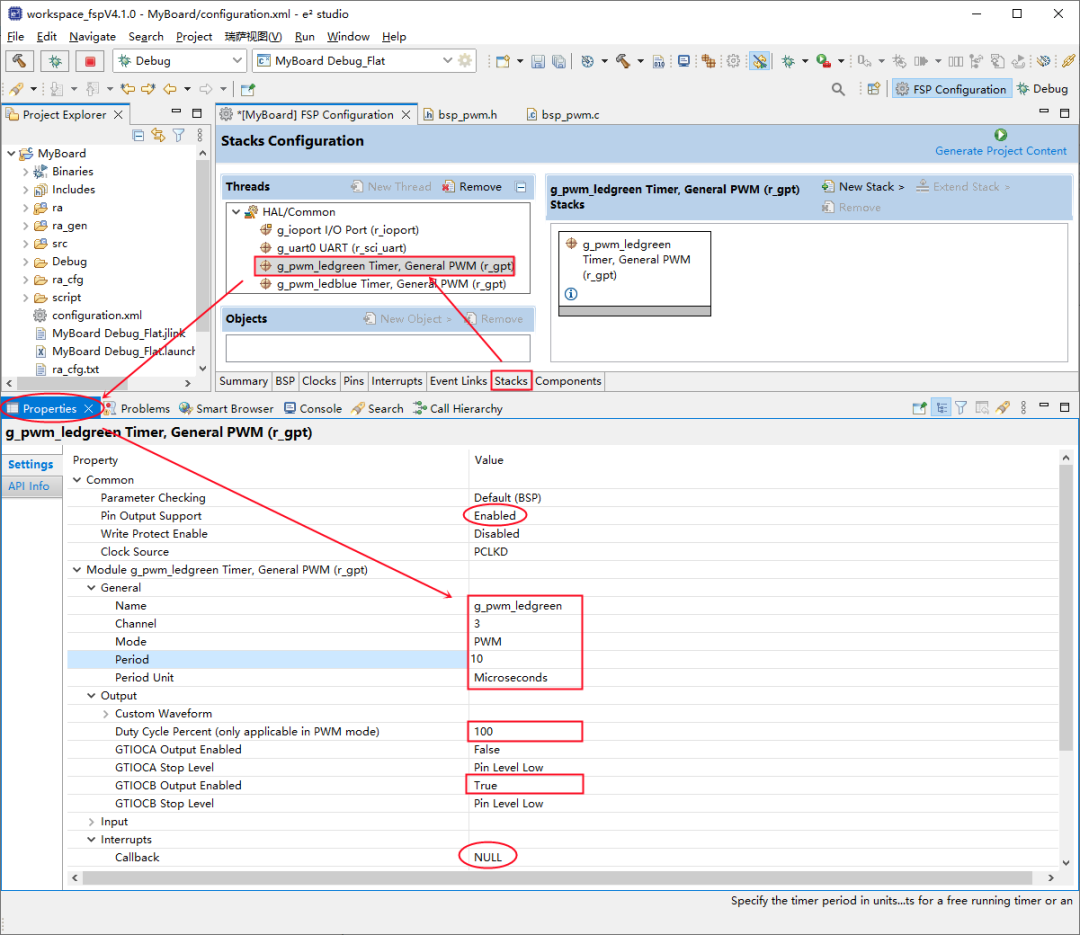
- 在绿色的Led配置中,我们设置定时器的频率为10ms,并设置占空比为100%。接下来将会在主函数的循环里修改它的占空比,这样灯的亮度将由强到弱,再由弱到强;
- 在蓝色的Led配置中,我们设置定时器端的频率为400ms,并设置占空比为50%(高电平200ms)。接下来我们将会在其中断回调函数中来调整它的频率,让它快闪2下之后再灭掉。
5.3 源码修改
创建PWM定时器操作相关的头文件 src/bsp_pwm.h 如下。
#ifndef BSP_PWM_H_
#define BSP_PWM_H_
fsp_err_t pwm_init(void);
#endif /* BSP_PWM_H_ */
创建PWM定时器操作相关的c文件 src/bsp_pwm.c 如下。
#include 修改 src/hal_entry.c 源文件,在里面修改绿色灯作为呼吸灯工作的的代码如下。
... ...
#include "bsp_pwm.h"
... ...
void hal_entry(void)
{
timer_info_t info;
uint32_t period_counts;
uint32_t duty = 0;
... ...
pwm_init();
R_GPT_InfoGet(&g_pwm_ledgreen_ctrl, &info);
period_counts = info.period_counts;
/* Green Led work as breathe mode */
while (1)
{
duty ++;
if( duty <= 100 )
{
R_GPT_DutyCycleSet(&g_pwm_ledgreen_ctrl, (duty*period_counts)/100, GPT_IO_PIN_GTIOCB);
}
else if( duty>100 && duty<= 200 )
{
R_GPT_DutyCycleSet(&g_pwm_ledgreen_ctrl, ((200-duty)*period_counts)/100, GPT_IO_PIN_GTIOCB);
}
else
{
duty = 0;
R_GPT_DutyCycleSet(&g_pwm_ledgreen_ctrl, 0, GPT_IO_PIN_GTIOCB);
}
R_BSP_SoftwareDelay(20, BSP_DELAY_UNITS_MILLISECONDS);
}
... ...
}
5.4 编译运行
代码修改完成后,在开发板上编译运行。这时可以看到蓝色Led每隔3.4秒将快闪两次,而绿色Led灯则亮度由弱到强,再由强到弱。
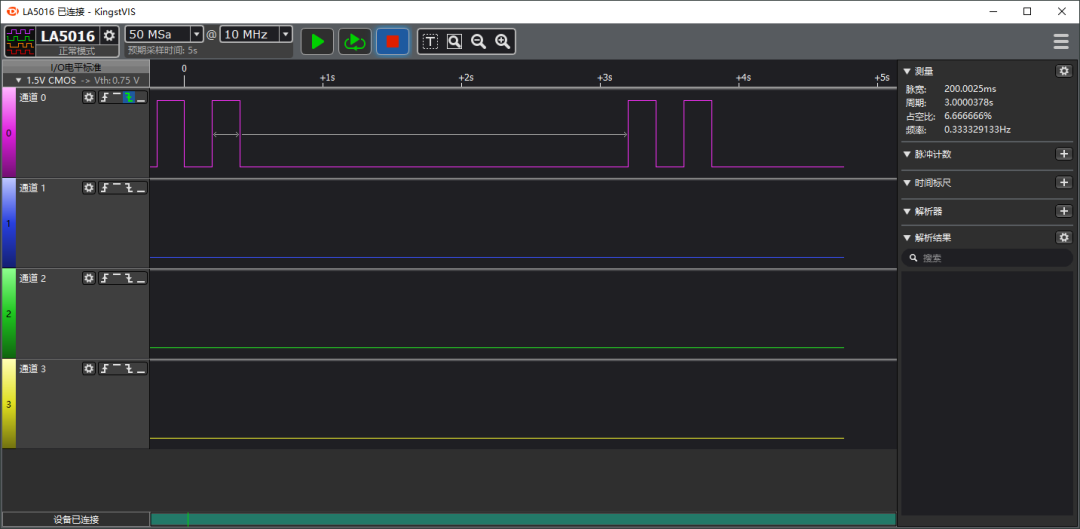
下面是测量蓝色Led的波形图:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
怎么样去设计基于单片机与PWM的呼吸灯2021-07-15 0
-
定时器中断模拟PWM波实现呼吸灯2021-08-09 0
-
采用定时器PWM功能实现呼吸灯的功能2021-08-12 0
-
51单片机如何利用PWM定时器实现呼吸灯?2021-10-15 0
-
如何利用定时器实现呼吸灯?2023-10-25 0
-
使用定时器功能实现呼吸灯亮暗过程2018-06-11 12253
-
利用定时器实现呼吸灯亮暗过程2018-06-14 15777
-
使用单片机的定时器模拟PWM输出实现呼吸灯的程序免费下载2019-09-06 1373
-
如何不使用定时器制作简易的51单片机呼吸灯程序免费下载2019-07-08 1255
-
基于51单片机的LED呼吸灯设计(定时器)2021-11-04 460
-
51单片机利用PWM、定时器实现呼吸灯2021-11-10 734
-
51单片机基于定时器的精准呼吸灯2021-11-21 1117
-
STM32 使用PWM实现呼吸灯2021-12-24 1251
-
基于定时器的PWM呼吸灯实例2023-05-01 1186
-
51单片机呼吸灯频率怎么调节2023-12-19 2627
全部0条评论

快来发表一下你的评论吧 !
