

飞行时间深度传感相机的光学设计
描述
抽象
光学器件在飞行时间(ToF)深度传感相机中起着关键作用,光学设计决定了最终系统及其性能的复杂性和可行性。3D ToF相机具有某些独特的特性1这推动了特殊的光学要求。本文介绍了深度传感光学系统架构(由成像光学组件、接收器上的ToF传感器和发射器上的照明模块组成),并讨论了如何优化每个子模块以提高传感器和系统性能。
介绍
ToF是一种新兴的3D传感和成像技术,在自动驾驶汽车、虚拟和增强现实、特征识别和物体尺寸标注等领域得到了广泛的应用。ToF相机通过测量光线从光源传播到场景中的物体并返回像素阵列所需的时间来获取深度图像。ADI公司的ADSD3100背照式(BSI)CMOS传感器采用的特定技术类型称为连续波(CW)调制,这是一种间接ToF检测方法。在CW ToF相机中,来自调幅光源的光被相机视场(FOV)中的物体反向散射,并测量发射波形与反射波形之间的相移。通过测量多个调制频率下的相移,可以计算每个像素的深度值。相移是通过使用像素内光子混合解调测量发射波形与接收波形在不同相对延迟下的相关性而获得的。2CW ToF的概念如图1所示。
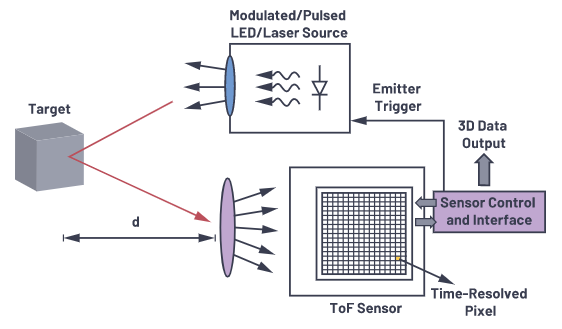
图1.ToF技术的概念。
深度传感光学系统架构
图2显示了光学系统架构。它可以分为两个主要的子模块类别:成像模块(也称为接收器或Rx)和照明模块(也称为发射器或Tx)。以下各节将介绍各组件的功能、ToF系统特有的要求以及相应的设计示例。
照明模块
照明模块由光源、以高调制频率驱动光源的驱动器和将光束从光源投射到设计照明场(FOI)的扩散器组成,如图2所示。
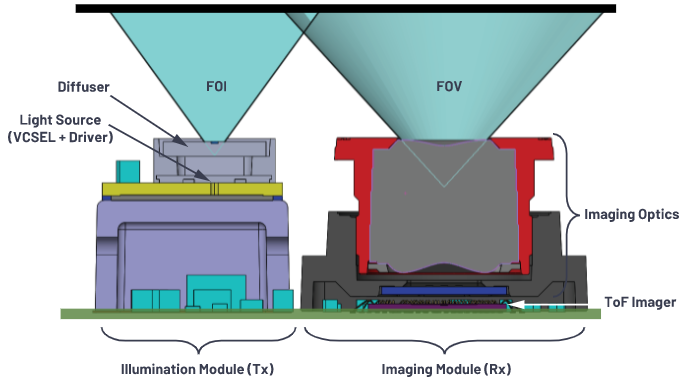
图2.ToF光学系统架构横截面的示例。
光源和驱动器
ToF模块通常使用波长温度依赖性较低的窄带光源,包括垂直腔面发射激光器(VCSEL)和边缘发射激光器(EEL)。发光二极管 (LED) 通常太慢,无法满足 ToF 调制要求。VCSEL因其较低的成本、外形尺寸和可靠性以及易于集成到ToF模块中而近年来越来越受欢迎。与EEL(从侧面发射)和LED(从侧面和顶部发射)相比,VCSEL发射垂直于其表面的光束,从而提供更好的生产良率和更低的制造成本。此外,通过使用具有设计发散和光学轮廓的单个工程扩散器,可以实现所需的FOI。激光驱动器的优化以及印刷威廉希尔官方网站 板(PCB)和光源的电气设计和布局对于实现高调制对比度和高光功率至关重要。
照明波长(850 nm 与 940 nm)
虽然ToF的工作原理不依赖于波长(而是取决于光速),因此波长不应影响精度,但在某些用例中,波长的选择会影响系统级性能。以下是选择波长时的一些注意事项。
传感器量子效率和响应度:
量子效率(QE)和响应度(R)是相互关联的。
QE测量光电探测器将光子转换为电子的能力。
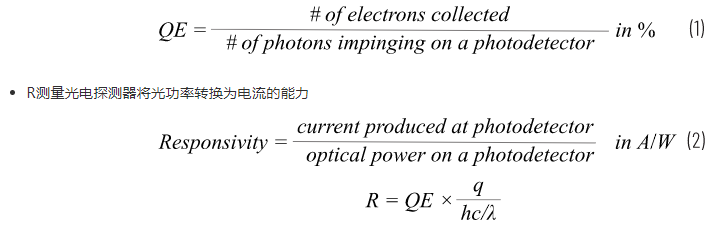
其中Q是电子电荷,H是木板常数,c是光速,λ是波长。
通常,硅基传感器的QE在850 nm处比在940 nm处好约2×或更多。例如,ADI CW ToF传感器在850 nm处的QE为44%,在940 nm处的QE为27%。对于相同数量的照明光功率,更高的QE和R导致更好的信噪比(SNR),特别是当没有太多光返回传感器时(对于远处或低反射率的物体就是这种情况)。
人类感知
虽然人眼在近红外 (NIR) 波长范围内不敏感,但人眼可以感知 850 nm 的光。另一方面,人眼看不到 940 nm。
阳光
尽管光谱可见光区域的太阳辐射最大,但近红外区域的能量仍然很大。阳光(以及更普遍的环境光)会增加深度噪点并缩小ToF相机的覆盖范围。幸运的是,由于大气吸收,920 nm至960 nm区域的太阳光辐照度有所下降,与850 nm区域相比,太阳辐照度不到一半(见图3)。在户外应用中,在 940 nm 处操作 ToF 系统可提供更好的环境光抗扰度,并带来更好的深度传感性能。
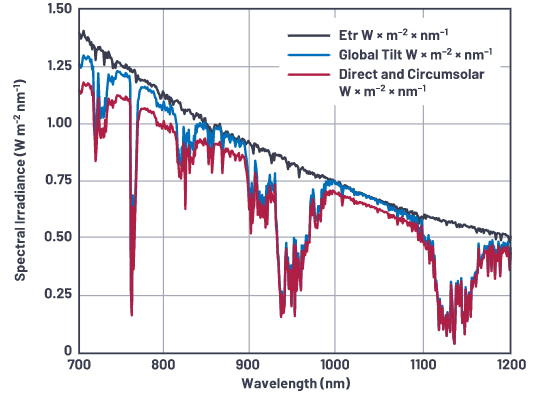
图3.近红外中的太阳光谱辐照度。3
辐射强度(每立体角的光功率)
光源产生恒定的光功率,分布在漫射光学器件产生的FOI内的3D空间中。随着FOI的增加,每个球面度(sr)的持续能量(即辐射强度[W/sr])降低。了解FOI和辐射强度之间的权衡非常重要,因为它们会影响ToF系统的SNR,从而影响深度范围。
表 1 列出了 FOI 的几个示例及其相应的辐射强度归一化为 60° × 45° FOI 的辐射强度。请注意,辐射强度计算为每个矩形立体角的光功率。

照明配置文件规格
为了完全定义照明轮廓,应明确指定几个特征,包括轮廓形状、轮廓宽度、光学效率(即特定视场内的封闭能量)和 FOI 外的光功率下降。照明剖面规格通常以角空间中的辐射强度定义。在数学上,它表示为:

其中dΦ是发射到立体角dΩ的功率。FOI需要与成像器的纵横比相匹配,因此通常是正方形或矩形。
FOI内部的照明轮廓形状
ToF泛光照明中最常见的辐射强度分布具有蝙蝠翼形状。他们的个人资料因 cos 而异-n(θ)补偿成像镜头的下降(即相对照度)。图 5 展示了蝙蝠翼照明剖面的示例。如果希望从平面目标对成像器的像素阵列实现恒定辐照度,则还应考虑cos3(θ) 目标中心和目标边缘之间的辐照度 (E) 下降系数 [W/m2],定义为:

其中E是辐照度,dA是光功率dΦ照亮的表面积,R(θ)是图4中定义的光源到dA的距离,dΩ = dAcos(θ)/R(θ)2.
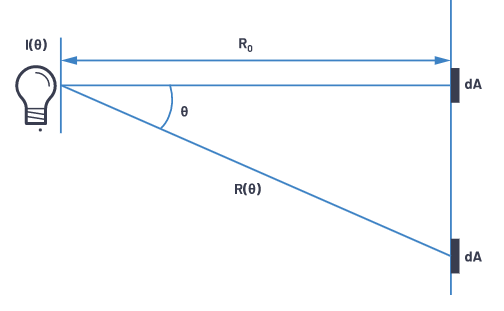
图4.辐照度分布与强度的关系。
型材宽度
轮廓的宽度决定了照明轮廓的FOI。它可以定义为全宽半最大或 1/e2的最大强度。为了适应成像镜头与成像器之间的错位和漫射器的公差,FOI通常设计为略大于镜头的FOV,以避免暗像素。
轮廓的宽度是光源的强度曲线与扩散器对准直光束的响应的卷积。扩散器的输入发散角越宽,宽度越宽,过渡斜率越慢。更宽、更慢的过渡斜率会导致更多的能量落在FOI之外,从而导致光功率损耗。可以使用以下两个要求来指定此类损失的接受标准。
光学效率 — 成像镜头视场内的封闭能量
该规范定义了成像模块将接收多少能量,并由以下人员指定:
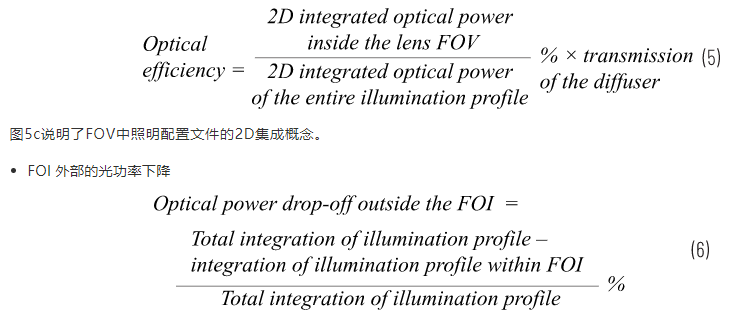
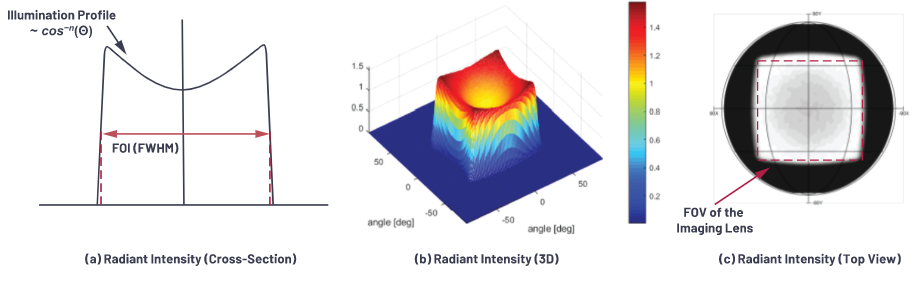
图5.照明配置文件示例。
通常,通过在光源和漫射器之间安装准直透镜来减小扩散器的输入角度,或者通过选择发散角较小的光源,可以提高光学效率。
成像模块
成像模块由成像镜头组件、带通滤光片(BPF)和成像仪上的微透镜阵列组成。成像仪背面光学堆栈的厚度和材料应针对低背反射进行优化。图6显示了成像模块的图示。
ToF成像镜头设计注意事项
由于ToF相机收集主动照明产生的光,因此像素阵列上光收集的效率和均匀性极大地影响了整体性能。镜头需要具有强大的收集力、高透射率和低杂散光。以下是ToF镜头的设计注意事项,与传统RGB相机镜头不同。
光收集效率
光收集效率与 1/(f/#) 成正比2,其中 f/# = (焦距)/(光圈大小)。f/#越小,效率越高。小型f/#光学系统有一些权衡。随着孔径尺寸的增加,往往会有更多的渐晕和像差,这使得光学器件的设计更具挑战性。低f/#系统也往往具有较浅的景深。
相对照度 (RI) 和主射线角度 (CRA)
RI 定义为:

传感器照度下降基于 (cos q)4定律,在无畸变和渐晕镜头系统中,其中q是传感器平面上的CRA入射角。结果是图像朝向传感器边界的相对变暗。通过在透镜系统中引入负畸变,可以减少辐照度衰减。
传感器边缘的最大CRA应根据成像器微透镜阵列规格进行优化。较小的CRA有助于缩小BPF的带宽,以实现更好的环境光抗扰度。
以下示例演示了整个场的 CRA 和聚焦光锥尺寸(有效 f/#)如何影响 RI。图7中示例1的镜头系统具有较大的CRA,并且随着视场角的增加,成像锥逐渐减小(即增加f / #)。相应的折射率随场角显著下降,如相应的折射率图所示。图 7 中的示例 2 表明,通过最小化 CRA 以及在整个字段中保持统一的 f/#,可以很好地维护 RI。
杂散光
杂散光是系统中任何可能被传感器检测到的意外光。杂散光可以来自场内或场外源,通过偶数次反射形成鬼像(例如,镜头光晕)。杂散光也可以来自光机械结构和任何散射表面。ToF系统对杂散光特别敏感,因为杂散光的多径特性为像素贡献了不同的光程长度,从而导致深度测量不准确。设计过程中需要使用几种策略来减少杂散光,例如优化增透膜和机械孔径,使透镜边缘和安装结构变暗,以及定制设计BPF以优化波长和CRA。
以下是一些可能影响系统中杂散光的项目:
暗角
理想情况下,ToF镜头系统中不应有任何暗角。暗角会切断成像光线,有时被用作一种提高图像质量的技术,同时牺牲外围场的亮度。然而,截止光线经常在镜头系统内反弹,并容易引起杂散光问题。
增透膜
光学元件上的AR镀膜降低了每个表面的反射率,可以有效减少透镜反射对深度计算的影响。增透膜应针对光源波长范围和透镜表面入射角的角度范围进行精心设计。
镜头元件数量
虽然添加更多的镜头元件提供了更大的自由度来实现设计规格和更好的分辨率图像质量,但它也增加了镜头元件不可避免的背反射,并增加了复杂性和成本。
带通滤波器
BPF 可切断环境光的贡献,对于 ToF 系统至关重要。BPF 设计应根据以下参数进行定制,以获得最佳性能。
(a) 镜头参数,如整个视场的f/#和CRA
(b) 光源参数,如带宽、标称波长公差和热偏移
(c) 基板材料对低入射角漂移与波长或低热漂移与波长的特性
微透镜阵列
ToF背照式(BSI)传感器通常具有一层微透镜阵列,用于将入射到图像传感器的光线会聚,并最大化到达像素调制区域的光子数量。微透镜的几何形状经过优化,可在光子转换为电子的像素区域内实现最高吸收。
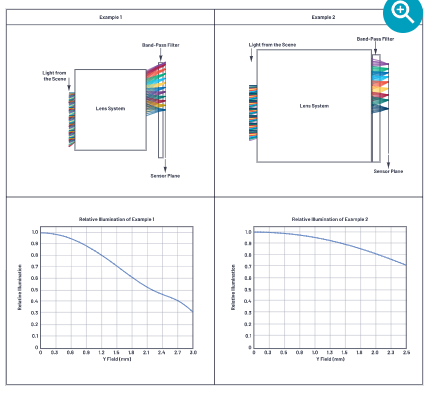
图7.相对照明示例。
在许多镜头设计中,镜头的CRA随着图像高度向传感器边缘的增加而增加,如图8所示。当CRA太大时,这种倾斜入射会导致像素中的吸收损失和相邻像素之间的串扰。重要的是设计或选择成像镜头,使镜头的CRA与其设计的微透镜阵列的规格相匹配。例如,与ADI ToF传感器ADSD3100匹配的最佳CRA在传感器水平和垂直边缘处约为12°。
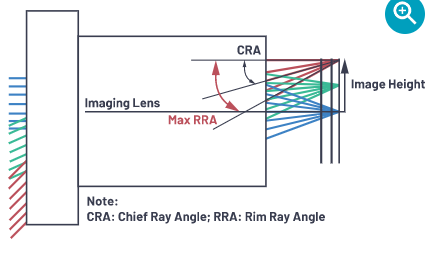
图8.成像镜头的最大CRA。
结论
ToF光学器件具有实现最佳性能的独特要求。本文概述了3D ToF相机的光学架构以及照明和成像子模块的设计指南,以帮助设计此类光学系统和/或选择子组件。对于照明子模块,关键因素是功率效率、可靠性以及光源在高调制频率和高调制对比度下驱动的能力。详细讨论了 850 nm 和 940 nm 之间的波长选择注意事项,以及如何指定照明配置文件。对于成像子模块,镜头设计考虑因素包括f/#、符合微透镜规格的CRA和杂散光控制,对于系统级性能至关重要。
-
最受欢迎的三种深度传感器2020-08-25 0
-
TOF飞行时间相机的原理是什么使用方法和应用的详细资料概述2018-07-11 3849
-
Terabee具有探测能力的新型间接飞行时间智能传感器推出2019-12-24 2183
-
飞行时间传感器的距离确定方法2020-04-12 4400
-
飞行时间传感器如何工作,使用飞行时间传感器的好处2020-11-03 2232
-
利用ToF原理创造了FlightSenseTM技术,推出了飞行时间(ToF)传感器2020-12-28 3888
-
用于距离测量和物体检测的飞行时间系统2022-11-22 738
-
飞行时间系统设计的应用概述2022-12-09 1021
-
飞行时间深度传感相机的光学设计2022-12-15 1486
-
飞行时间(TOF)相机的优缺点及其应用领域2023-05-10 1653
-
用于工业应用的成像传感器(包括飞行时间、环境光和相机传感器)2023-07-31 317
-
飞行时间传感器:技术原理与多元应用2024-02-19 820
-
多区飞行时间(ToF)传感器的特点2024-02-25 1147
-
飞行时间和激光雷达 - 光学前端设计应用说明2024-09-13 150
全部0条评论

快来发表一下你的评论吧 !
