
资料下载


基于Arduino UNO的自动驾驶无人机
香香技术员
分享资料个
本方案是一个基于 Arduino UNO 的自动驾驶无人机。
带有多个传感器和由两个微控制器控制的无线摄像头的 Arduino Uno 自动驾驶无人机。
通常我们会看到无人机使用射频遥控器进行控制,或者使用 GPS 模块进行自动驾驶,通过它给出正确的方向来自动控制它。但在我的项目中,我使用 Arduino Uno 以另一种方式处理事情。
该项目的主要目标是从特定的已知区域收集数据和 2D 视频信息。为了获取信息,我们必须使用Arduino编程分配无人机可以行驶的长度和宽度值。
顾名思义,自动驾驶仪意味着无人机将自己处理,而无人机的控制动作将由内置传感器来平衡无人机的飞行控制器处理。Arduino Uno 是系统的大脑,它向飞行控制器提供正确的信号。为了保持稳定性和持续运行,我使用了 OpenPilot CC3D 微控制器(或任何飞行控制器)和一个摄像头,通过天气监测传感器捕捉实时数据。最后,该系统包括一个蓝牙模块,用于打开/关闭无人机并使用 Android 移动设备显示实时数据。
阿杜诺UNO
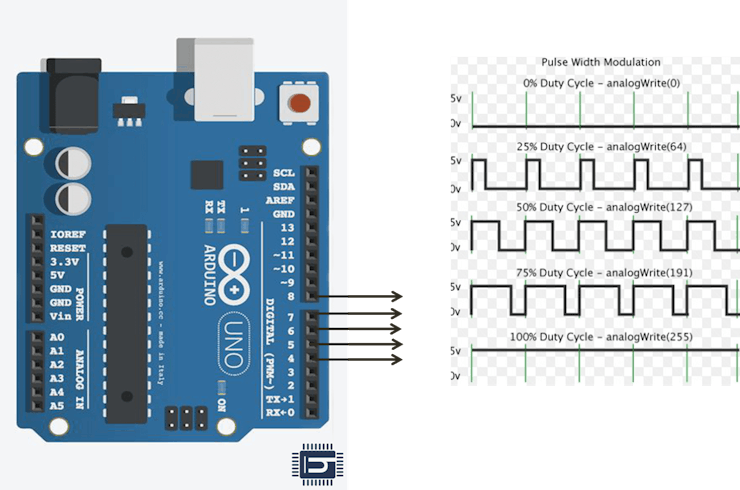
正如我们所知,arduino Uno 是 Atmega 微控制器。在这里,我生成了 PWM 信号来控制无人机。
CC3D飞行控制器:
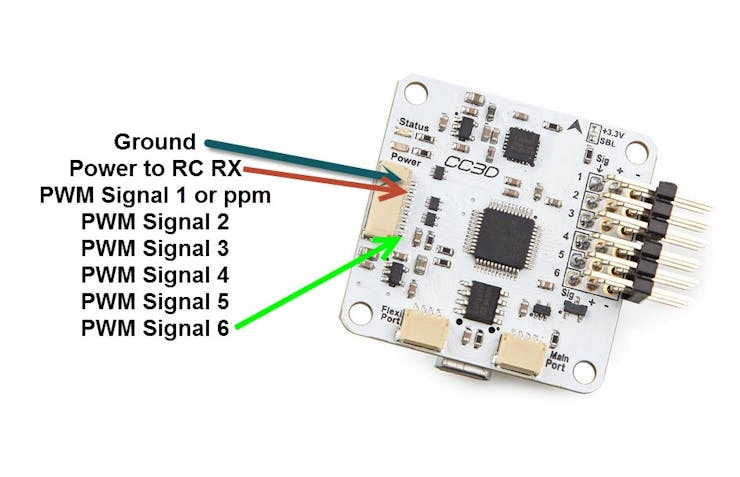
正如我们在上图中看到的,飞行控制器具有内置的陀螺仪和加速器控制器以及自动调平功能。
但是这些微控制器公司提供了自己的软件来对其进行编程,并且使用起来非常友好。
这些微控制器需要一个 PWM 信号作为输入来控制各个 BLDC 电机。这些信号将由 arduino uno 生成。
无人机设计的类型
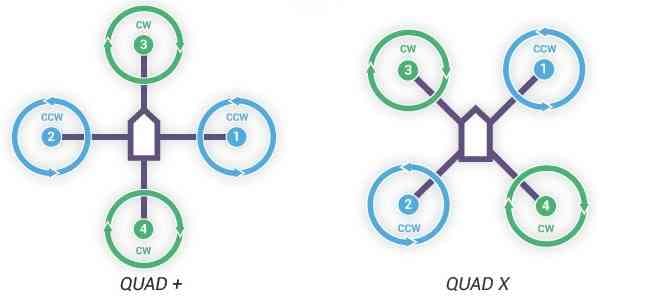
正如您在上面看到的,有两种类型的无人机设计可用于四格式无人机,根据您放置飞行控制器的方向,您可以选择四格式
方向指示将根据所选飞行控制器打印,对于所选格式,螺旋桨方向也是最重要的,CW(顺时针)和 CCW(逆时针)。
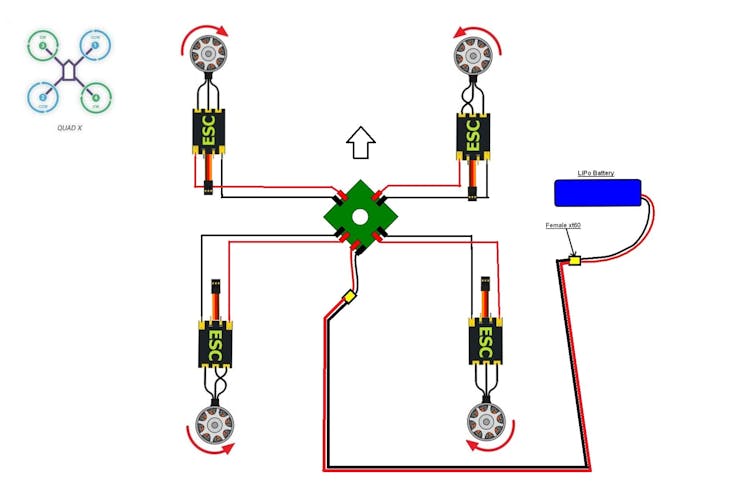
电调连接
顺时针

我们需要按顺时针方向连接电线,如上图所示
逆时针
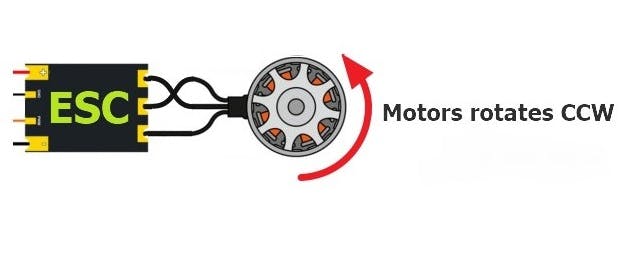
对于逆时针,我们需要交换任何两根电线,以便将电压的相位施加到电机上,从而改变电机方向
电机-ESC-飞行控制器连接
电调控制连接
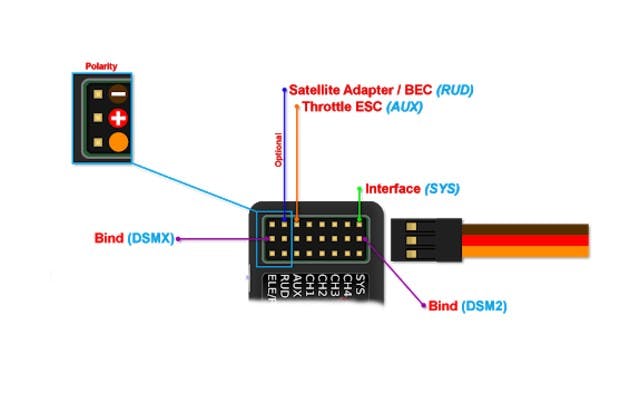
ESC 也有 3 根电线和 2 根电源线,
这 3 条线具有 VCC、接地和输入信号引脚,这些引脚从飞行控制器获取数据以旋转 BLDC 电机。
其他 2 线是额定电流较高的电源线,因此请使用较粗的电线,这些电缆与电池共用。
使用 ARDUINO UNO 的最终接线图
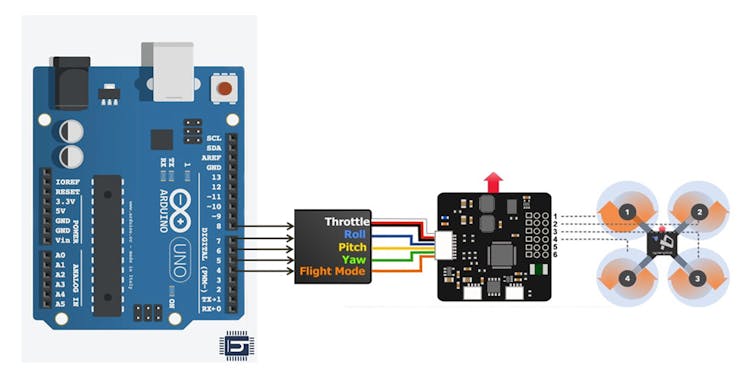
在这里我使用了 UART 协议,但没有数据被并行转换为串行。关于延迟,直接 PWM 信号从 arduino 施加到 CC3d。
移动应用

上面的快照显示了使用下面提到的开源网站构建的 android 应用程序。使用这个应用程序,我们可以打开和关闭无人机。并且还有另一个功能可以让我们在串行窗口中获取传感器数据,那就是手机。
纽扣
start : 此按钮将启动微控制器(CC3D 飞控)
mov:这使无人机飞行并执行其在arduino Uno内部编程的操作
停止:这是一个关闭无人机的紧急停止按钮(由于自动驾驶无人机没有遥控器,因此提供了额外的按钮)
启动传感器:按下时它会在白色屏幕上显示传感器数据,如下图所示
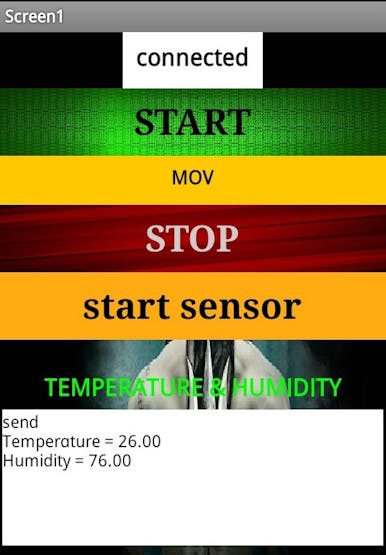
我们可以在该图中看到按下启动传感器按钮时将显示值的温度和湿度。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





