

轮速传感器芯片的输出协议介绍
描述
ABOUT
轮速传感器IC输出协议
01 简介
意瑞半导体的轮速传感器芯片提供了几种不同的输出协议,每种输出协议对应的输出信号都有一些区别,对应不同的应用场景以及程序需求。根据特定情况选取一个合适的轮速传感器输出协议非常重要。本文会介绍不同输出协议的区别及优劣势,如表1,总结了最常用的几种轮速传感器的输出协议。(*产品型号尾缀“C”的版本代表内置电容。)
| 输出协议 | 意瑞产品 | 应用场景 | 速度识别 | 方向识别 | 信号频率 | 优点 |
| 标准协议 | CH50 3(C) | 只需要轮速信息,不需要方向等其他信息 | 支持 | 不支持 | 1-10 kHz | 低延时,高速下稳定输出信号参数 |
| PWM协议 | CH50 4(C) | 应用程序同时需要准确的速度和方向信息 | 支持 | 支持 | 1-5 kHz | 可以提供方向检测以及气隙警告 |
| AK协议 | CH50 5(C) | 应用程序同时需要准确的速度,方向信息以及更多信息 | 支持 | 支持 | 0-5 kHz | 可以发送更多信息(速度脉冲外还有9位数据位),静止状态下依然能输出信息 |
表1:轮速传感器芯片输出协议总结
02 标准协议
轮速传感器在测量齿轮转速时,被测量的运动部件会经过传感器的前端,引起磁力线密度的变化。标准协议是轮速传感器中最简单的协议,CH503(C)内置两个霍尔盘,将霍尔盘间的差分信号调整并且放大,当输入信号越过其最大值和最小值的算术平均值时发生切换(例如正弦信号的过零点),即输出从ON变为OFF,反之亦然。一个有效的传感器输出只能处于OFF或ON两种状态,分别用低电流和高电流表示,最终输出方波信号,如图1所示。
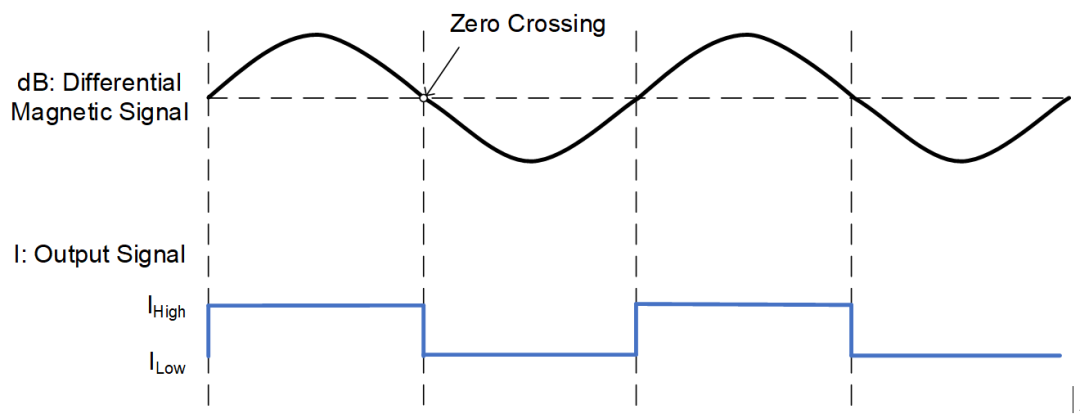
图 1:标准协议输出
对于只需要速度信息、不需要方向信息的应用来说,标准的速度协议非常适合选用,在允许的气隙范围内,方波信号的输出都是很稳定的,CH503(C)的占空比波动小、延时较小,在高速的轮速下输出参数依然稳定有效。但是这种协议的缺点就是无法输出其他信息,例如方向以及气隙警告等。
03 PWM协议
PWM协议的电流与标准协议类似,威廉希尔官方网站 中的开和关状态由高和低电流来表示。磁输入信号的每一次过零都会触发一个输出脉冲,通常每个轮齿旋转的周期会产生固定脉冲数,速度信息就可以根据输出脉冲率提供,输出信号的连续上升沿之间的间隔时间就是脉冲率。除了速度信号以外,还会通过PWM调制的方式改变输出脉冲的宽度,从而提供更多的信息。
关于方向的定义,如图2所示,CH504(C)芯片带丝印的面朝向目标齿轮,齿轮从芯片GND引脚侧往VDD侧转时,输出脉冲传递的是DR-R的方向信息;而当目标齿轮从VDD侧往GND侧转时,输出脉冲传递的是DR-L的信息。两个方向信息以不同的脉冲宽度体现,可以帮助控制单元了解此时齿轮转动的方向。同样,如果气隙超出临界值的时候,脉冲宽度变化也会给出警告信息。具体的脉宽调制的宽度取决于传感器芯片的编程。PWM协议的输出波形如图3所示。
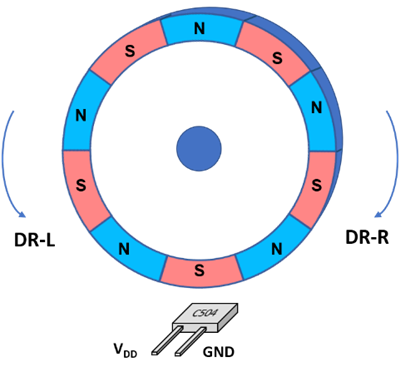
图2:方向的定义
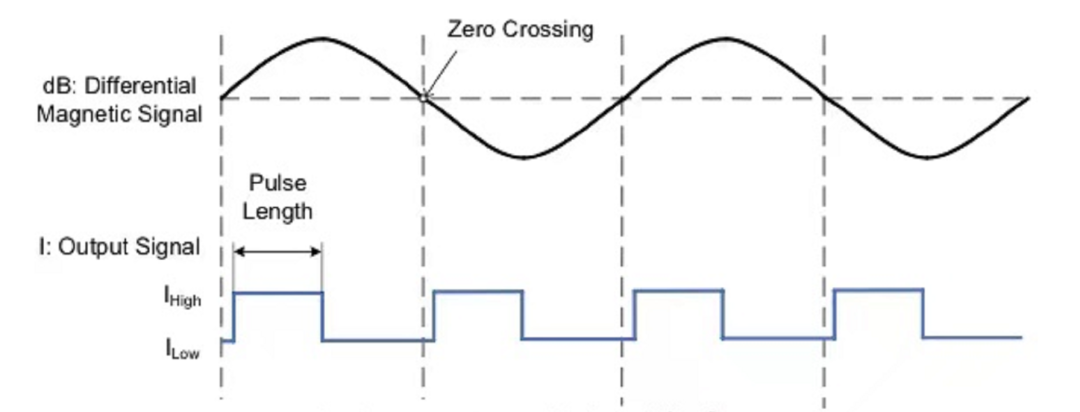
图3:PWM协议输出
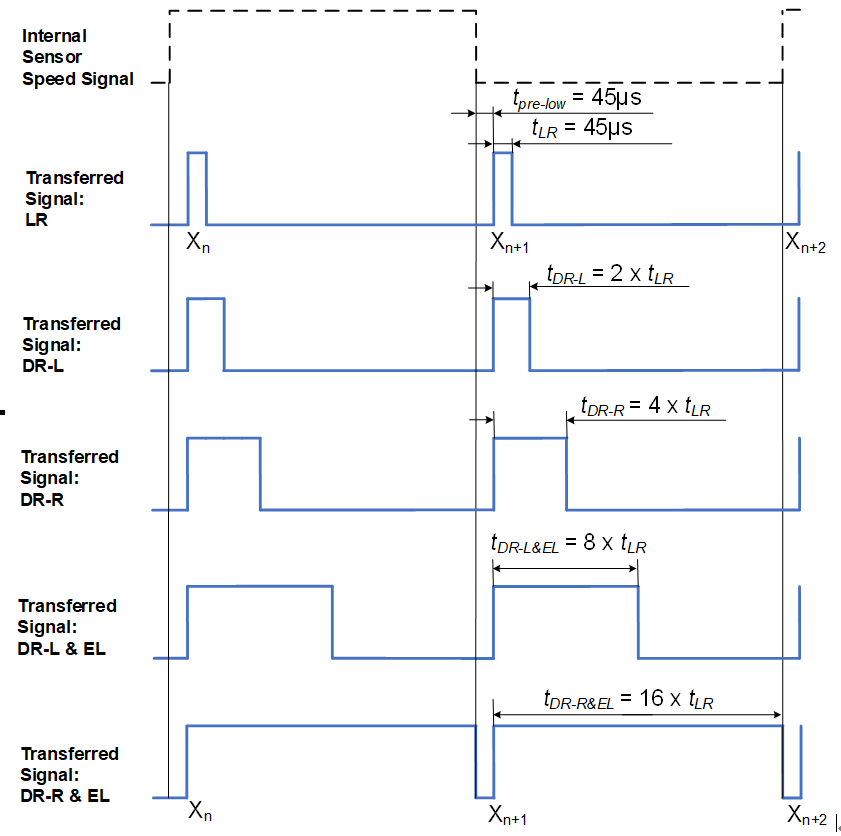
图4:PWM协议不同脉宽传递的信息
相较于标准协议,PWM协议不仅仅是提供速度信息,还有方向和气隙警告等信息。车轮的正反转判断信息大大提高了轮速传感器在智能方面的应用。
04 AK协议
AK协议包含一个IHIGH的速度脉冲和后续的九位数据信息位,速度脉冲是提供齿轮的速度信息,后续的数据信息位提供更多的其他信息,例如方向以及气隙信息等。这些数据信息位是曼彻斯特编码,一帧数据内,数据段的波形,若检测到电流上升沿则表示数据1,电流下降沿表示数据0。编码1和0由IMID和ILOW组成,可以看出AK协议的速度信号由三种电流构成。数据信息位的0和1代表了各自不同的信息,每一位数据信息位也有各自的信息,例如方向或者是气隙警告。CH505(C)的输出波形由图5所示,AK协议数据信息如表2所示。
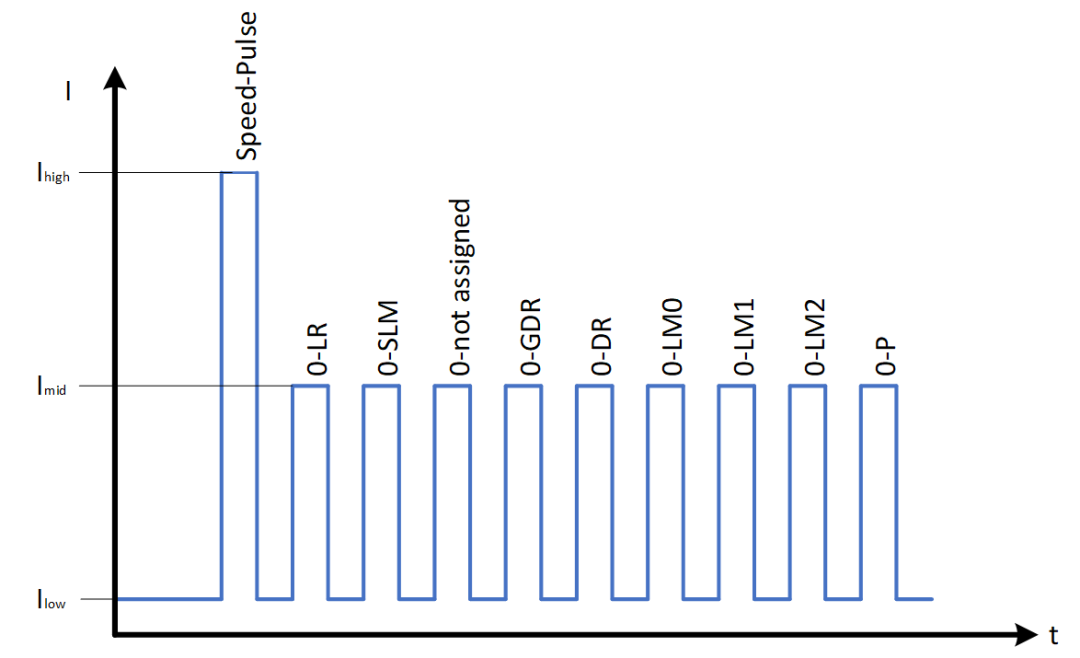
图5:AK协议输出波形
| Bit # | Meaning | Name |
Value after power up/under voltage |
Condition |
| 0 | LR |
Error bit, Airgap reserve |
0 |
“1” if dB |
| 1 | SLM |
Validity of signal amplitude measurement |
1 | 0=measurement of LM0, LM1, LM2 is valid; 1=invalid |
| 2 | not assigned | 0 | ||
| 3 | GDR | Direction validity | 0 | “1” = valid, “0” = invalid |
| 4 | DR |
Direction of rotating information |
0 | “0”=direction positive |
| 5 | LM0 | Air gap gauge | 0 | LSB of airgap gauge |
| 6 | LM1 | 0 | ||
| 7 | LM2 | 0 | MSB of airgap gauge | |
| 8 | P | Parity |
To be currently calculated |
Always set to get even parity (inclusive Parity bit itself) |
表2:CH505(C)的数据信息位含义
可以看出数据中包含了气隙有效性、方向有效性与正反转信息,这些单个数据可以在电控单元上被解码,从而获得具体状态的信息。即便是静止的状态下(Standstill mode),速度脉冲消失,但是后面的数据位依然能输出,对于需要智能轮速传感器的应用十分重要。然而AK协议中由于传输消息的时间会很长,高速状态下改为只输出其中几位数据位,所以目标轮转动的最大速度可能会受到一定的限制。
05 小结
本文就常见的几种轮速传感器协议做了一些介绍,分析了它们的特点以及优劣势。不难看出,在不同的应用场景下,选择一个更合适的输出形式非常重要,协议的选择是高度依赖于应用程序的需求的。可以根据需求从CH50X系列中挑选标准协议、PWM协议、及AK协议三种输出形式的轮速传感器,更多详细的数据信息可以通过规格书来获取。
审核编辑:汤梓红
-
ABS轮速传感器检测2018-10-30 0
-
磁阻式轮速传感器在ABS中的应用2018-11-14 0
-
ABS轮速传感器波形测试2018-11-15 0
-
电磁感应式轮速传感器的识别与检测2018-11-16 0
-
霍尔式轮速传感器的识别与检测2018-11-16 0
-
实车ABS四轮轮速传感器信号再现系统---设备2019-03-26 0
-
如何使用汽车示波器检查ABS轮速传感器2020-08-24 0
-
轮速传感器工作原理_轮速传感器的作用2019-11-11 16440
-
轮速传感器故障现象_轮速传感器安装位置2019-11-11 7988
-
轮速传感器怎么检测及方法介绍2019-11-11 16241
-
轮速传感器坏了的现象_轮速传感器坏了是什么原因造成的2020-08-06 63658
-
轮速传感器的类型和基本原理2022-12-13 13001
-
轮速传感器AK传输协议学习2023-01-07 5845
-
CH505C及轮速传感器芯片的输出协议介绍2023-01-12 1298
-
轮速传感器有什么作用,轮速传感器如何工作2023-06-30 11875
全部0条评论

快来发表一下你的评论吧 !
