
资料下载


使用Arduino Yun的超声波制图器
李义坤
分享资料个
描述
第一步:理论
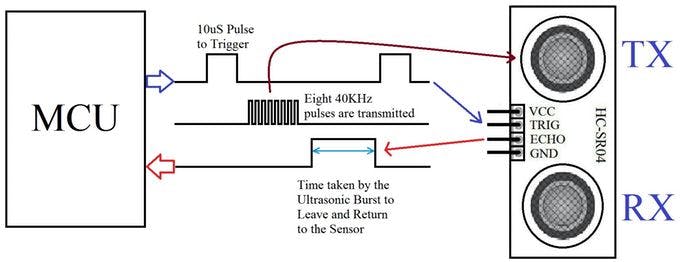
在这个项目中,我们使用超声波距离传感器。它产生超出人类听觉范围的声波,并通过计算这些声波撞击障碍物并返回所需的时间来测量距离。这类似于蝙蝠和游轮使用的原理。
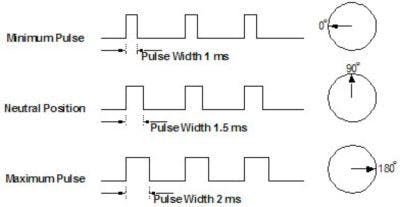
我们将要使用的另一个组件是伺服电机。它不同于通常的直流电机,因为它可以非常精确地转动到给定的角度位置并保持其状态。当给伺服电机提供特定持续时间的脉冲时,它会移动到相应的角度位置。
我们将使用这两个组件来为我们的机器人获得 180 度的视野。
第 2 步:收集材料
该项目使用以下硬件
- Arduino Uno/Yun(请注意,可以使用任何 Arduino 足迹板代替 Uno 或 Yun)
- Arduino 原型扩展板
- HC-04 超声波传感器
- 伺服电机(我使用 Tower Pro SG90 因为它非常紧凑)
- 在软件方面,我们使用以下程序
- Arduino IDE 将控制代码上传到Arduino 以旋转舵机并从超声波传感器获取距离数据并将其推送到串口。
- Mathworks MatLab 从串行线路接收数据,对其进行处理并将其可视化为图形。
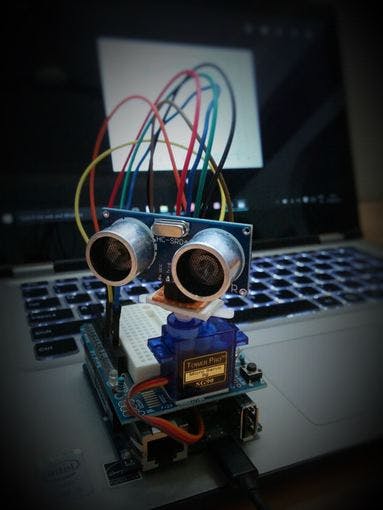
第 3 步:机械组装

使用一小块通用 PCB,为 HC-04 制作一个小接头,并使用一块双面胶带将其连接到伺服喇叭上。

此步骤是可选的,但为了使系统更紧凑,我还使用双面胶带将伺服器连接到原型板护罩的突出部分。
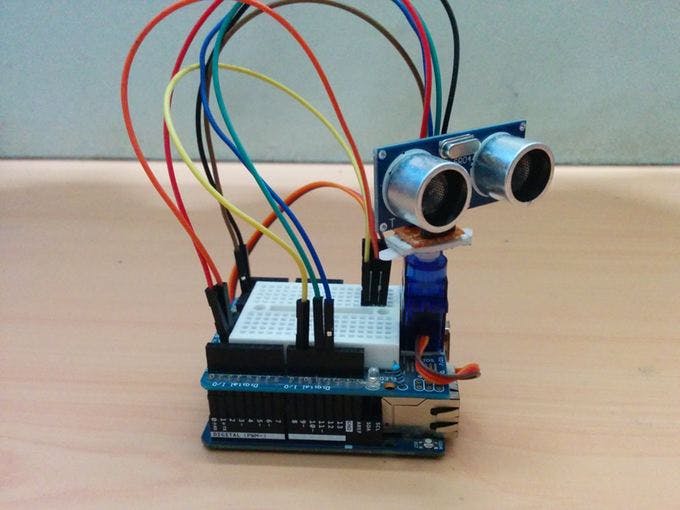
最终的结果应该看起来像瓦力的腹部。
第 4 步:Arduino 代码
Arduino 代码控制伺服电机的运动,以及何时捕获超声波传感器的读数以及捕获频率。它还将传感器数据推送到串行端口。
- 导入库
- 初始化变量和引脚。
- 初始化伺服对象
- 初始化串口通信
- 等待 3 秒
- 将计数器初始化为 0
- 将舵机旋转 1 度
- 获取超声波传感器数据10次(默认设置)
- 平均数据
- 将平均值发送到串口
- 返回第 7 步
第 5 步:MatLab 代码
MatLab 代码处理的数据多于威廉希尔官方网站 板的实际控制,因此所有传感器数据都通过串行方式推送到 PC,由 MatLab 读取。
现在,我们从 Arduino 收到的数据告诉我们两件事。舵机的旋转角度和障碍物在该方向的距离。因此,此时我们拥有的数据位于极坐标系中。为了使它在可视化时对人眼有意义,必须将其转换为笛卡尔或 XY 坐标系。
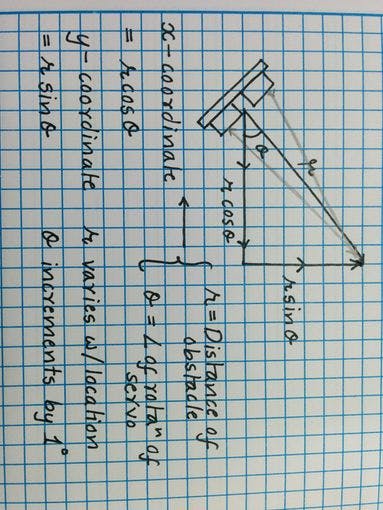
所以 MatLab 代码就是这样做的。它从COM端口串行获取数据,将其与旋转角度一起保存到一个矩阵中,然后用上面给出的公式将其转换成笛卡尔坐标。
完成后,它会通过在图表上绘制点来提供输出。我将威廉希尔官方网站 板放入盒子中,得到以下结果。
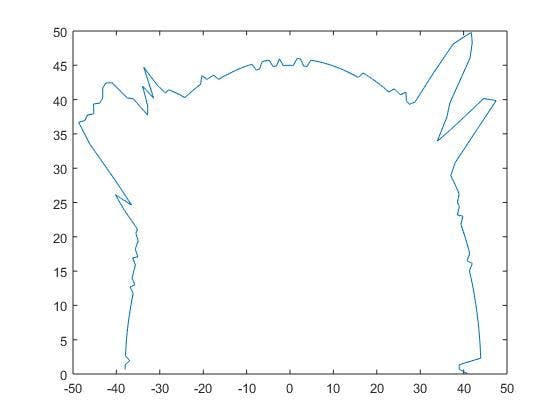
第 6 步:结论
尽管该系统并不完美,但它可以完成工作。它可以粗略估计箱子的宽度和长度,并准确发送数据。
目前我能看到的唯一错误是由于伺服器移动时传感器的晃动以及传感器本身的错误读数。
除此之外,该系统运行良好,可用于深度感知实验以及基本的计算机视觉项目。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






