

STM32中的独立看门狗和窗口看门狗是什么
描述
一、前言
在早期的MCU中是没有看门狗这种东西的,所以产品就很容易出现死机,跑飞的情况。为了避免这种情况的出现,后期的MCU都集成了看门狗的功能。但是目前看门狗发展到今天基本上分为两大类:独立看门狗和窗口看门狗。
独立看门狗 :使用的是外部时钟,即使主频不工作了,看门狗也能正常工作。只要在到达喂狗时间的上限前喂狗即表示程序是正常的,这点和窗口看门狗是有区别的。另外独立看门狗是独立于整个系统之外的,这也是独立看门狗名字的由来,他有自己独立的时钟,不受整个系统的影响,所以独立看门狗主要用来监控硬件上的错误。
窗口看门狗 :使用芯片内部时钟。喂狗的时间既有上限又有下限,即喂狗太早或者太晚都不行,比如我要求你在0.8s到0.9s内完成喂狗动作,如果你在0.8s之前或者在0.9s之后喂狗都是不可以的,都会认为MCU出现了异常,从而复位MCU。窗口看门狗是系统内部故障探测器,如果系统时钟出现了错误,那么窗口看门狗也就失去了作用,主要用于监视软件的错误。
二、独立看门狗
从上面的简单对于相信大家对于独立看门狗已经有些了解了,这部分就详细的给大家讲解一下独立看门狗,以及独立看门狗的实现原理。
在了解独立看门狗之前我想大家还是需要先了解一下看门狗到底是来干什么的,在由单片机构成的微机系统中,由于单片机工作常常会受到来自外界电磁场干扰导致程序跑飞,陷入死循环——即程序正常运行被打断,系统无法继续工作。
这种情况下会造成系统陷入停滞状态,发生不可预料的后果。因此出于对单片机运行状态进行实时监测的考虑,产生了一种专门用于监测单片机程序运行状态的模块或芯片,称为看门狗。
这里以大家熟悉的STM32为例给大家讲解一下独立看门狗的配置以及工作过程。STM32F10xxx内置两个看门狗:独立看门狗和窗口看门狗,提供了更高的安全性、时间的精确性和使用的灵活性。
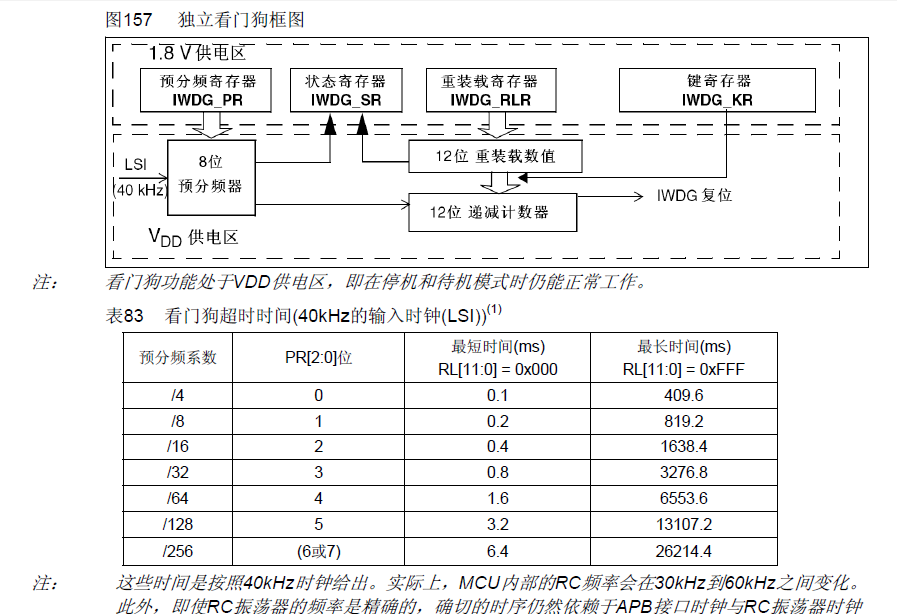
在这里插入图片描述
STM32中的独立看门狗时通过向键值寄存器(IWDG_KR)写入0xCCCC来进行配置的,当开启了独立看门狗之后其计数器就开始从0xFFF递减计数。当计数器计数到末尾0x000时,会产生一个复位信号(IWDG_RESET)。无论何时,只要键寄存器IWDG_KR中被写入0xAAAA,IWDG_RLR中的值就会被重新加载到计数器中从而避免产生看门狗复位。
IWDG_PR和IWDG_RLR寄存器具有写保护功能。要修改这两个寄存器的值,必须先向IWDG_KR寄存器中写入0x5555。将其他值写入这个寄存器将会打乱操作顺序,寄存器将重新被保护。重装载操作(即写入0xAAAA)也会启动写保护功能。
知道了上面配置的基本原则之后我们就可以开始配置我们的看门狗了,具体配置过程及配置代码如下所示:
- 取消寄存器写保护;
- 设置独立看门狗的与分频系数,确定时钟;
- 设置看门狗重装载值;
- 使能看门狗;
- 应用程序喂狗;
配置代码如下所示:
/**
* 初始化独立看门狗
* prer:分频数:0~7(只有低 3 位有效!)
* 分频因子=4*2^prer.但最大值只能是 256!
* rlr:重装载寄存器值:低 11 位有效.
* 时间计算(大概):Tout=((4*2^prer)*rlr)/40 (ms).
*/
void IWDG_Init(u8 prer,u16 rlr)
{
IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable); /* 使能对寄存器IWDG_PR和IWDG_RLR的写操作*/
IWDG_SetPrescaler(prer); /*设置IWDG预分频值:设置IWDG预分频值*/
IWDG_SetReload(rlr); /*设置IWDG重装载值*/
IWDG_ReloadCounter(); /*按照IWDG重装载寄存器的值重装载IWDG计数器*/
IWDG_Enable(); /*使能IWDG*/
}
/**
* 喂独立看门狗
*/
void IWDG_Feed(void)
{
IWDG_ReloadCounter(); /*reload*/
}
/**
*main函数
*/
void main(void)
{
NVIC_Configuration();//优先级配置
IWDG_Init(4,625);//初始化独立看门狗,分频数为64,重装载值为625,溢出时间计算为:64*625/40=1000ms=1s
while(1)
{
delay_ms(500);//0.5秒喂一次狗
IWDG_Feed();//喂狗
}
}
对于溢出时间的计算大家可以按照下面的公式计算:Tout=((4×2^prer) ×rlr) /40 (M3)
独立看门狗所用到的库函数:
void WWDG_DeInit(void);
void WWDG_SetPrescaler(uint32_t WWDG_Prescaler);
void WWDG_SetWindowValue(uint8_t WindowValue);
void WWDG_EnableIT(void);
void WWDG_SetCounter(uint8_t Counter);
void WWDG_Enable(uint8_t Counter);
FlagStatus WWDG_GetFlagStatus(void);
void WWDG_ClearFlag(void);
三、窗口看门狗
窗口看门狗(WWDG)通常被用来监测由外部干扰或不可预见的逻辑条件造成的应用程序背离正常的运行序列而产生的软件故障。除非递减计数器的值在 T6 位 (WWDG->CR 的第六位)变成 0 前被刷新,看门狗威廉希尔官方网站
在达到预置的时间周期时,会产生一个 MCU 复位。
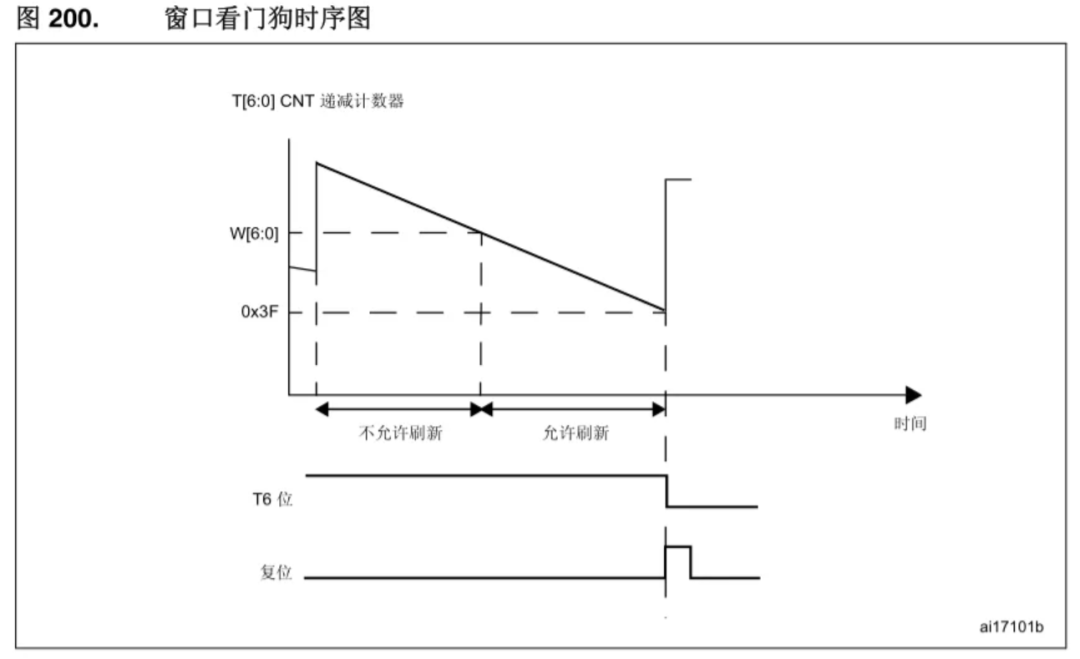
在递减计数器达到窗口配置寄存器(WWDG->CFR)数值之前,如果 7 位的递减计数器数值(在控制寄存器中)被刷新,那么也将产生一个 MCU 复位。这表明递减计数器需要在一个有限的时间窗口中被刷新。
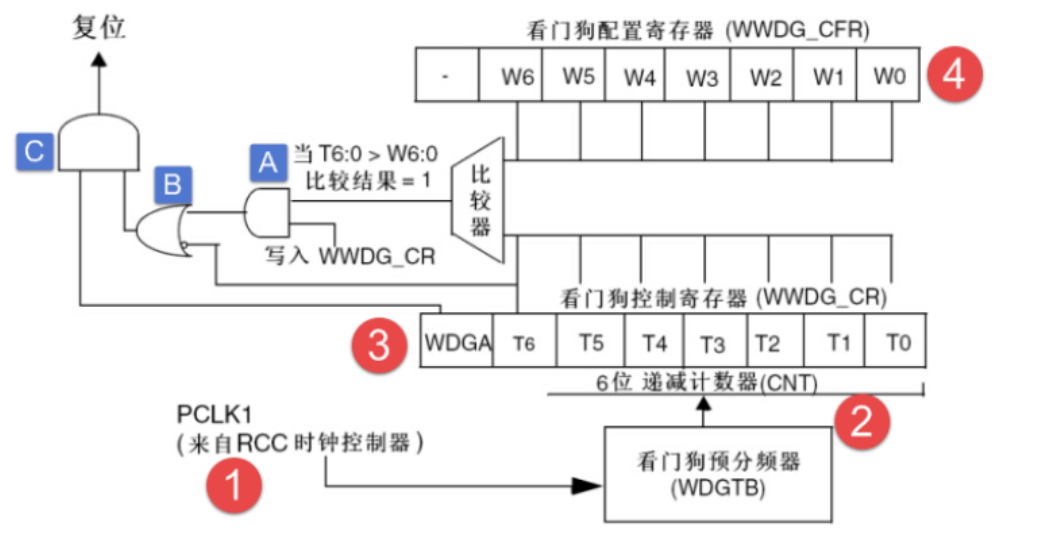
 但是在使用窗口看门狗的时候需要注意写入
但是在使用窗口看门狗的时候需要注意写入WWDG_CR 寄存器时,始终将 1 写入 T6 位,以避免生成立即复位。
下面来看一下窗口看门狗的配置步骤以及配置代码;
- 使能 WWDG 时钟
- 设置窗口值和分频数
- 开启 WWDG 中断并分组
- 设置计数器初始值并使能看门狗
窗体看门狗需要用到的库函数;
void RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG, ENABLE); // WWDG 时钟使能
void WWDG_SetWindowValue(uint8_t WindowValue);//设置窗口值的函数
void WWDG_SetPrescaler(uint32_t WWDG_Prescaler);//设置分频数的函数
void WWDG_EnableIT(); //开启窗口看门狗中断
void WWDG_Enable(uint8_t Counter);//设置计数器初始值并使能看门狗
注意 :在编写中断服务函数时喂狗一定要快,因为窗口看门狗的时效性比较强
窗口看门狗的代码如下:
.c
#ifndef __WDG_H
#define __WDG_H
#include "sys.h"
//独立看门狗
void IWDG_Init(u8 prer,u16 rlr);
void IWDG_Feed(void);
//窗口看门狗
void WWDG_Init(u8 tr,u8 wr,u32 fprer);//初始化WWDG
void WWDG_Set_Counter(u8 cnt); //设置WWDG的计数器
void WWDG_NVIC_Init(void);
#endif
.h
#include "wdg.h"
#include "led.h"
//窗口看门狗
//保存WWDG计数器的设置值,默认为最大.
u8 WWDG_CNT=0x7f;
//初始化窗口看门狗
//tr :T[6:0],计数器值
//wr :W[6:0],窗口值
//fprer:分频系数(WDGTB),仅最低2位有效
//Fwwdg=PCLK1/(4096*2^fprer).
void WWDG_Init(u8 tr,u8 wr,u32 fprer)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG, ENABLE); // WWDG时钟使能
WWDG_CNT=tr&WWDG_CNT; //初始化WWDG_CNT.
WWDG_SetPrescaler(fprer);设置IWDG预分频值
WWDG_SetWindowValue(wr);//设置窗口值
WWDG_Enable(WWDG_CNT); //使能看门狗 , 设置 counter .
WWDG_ClearFlag();//清除提前唤醒中断标志位
WWDG_NVIC_Init();//初始化窗口看门狗 NVIC
WWDG_EnableIT(); //开启窗口看门狗中断
}
//重设置WWDG计数器的值
void WWDG_Set_Counter(u8 cnt)
{
WWDG_Enable(cnt);//使能看门狗 , 设置 counter .
}
//窗口看门狗中断服务程序
void WWDG_NVIC_Init()
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = WWDG_IRQn; //WWDG中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //抢占2,子优先级3,组2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //抢占2,子优先级3,组2
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);//NVIC初始化
}
void WWDG_IRQHandler(void)
{
WWDG_SetCounter(WWDG_CNT); //当禁掉此句后,窗口看门狗将产生复位
WWDG_ClearFlag(); //清除提前唤醒中断标志位
LED1=!LED1; //LED状态翻转
}
main.c
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "wdg.h"
int main(void)
{
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init();
KEY_Init(); //按键初始化
LED0=0;
delay_ms(500);
WWDG_Init(0X7F,0X5F,WWDG_Prescaler_8);//计数器值为7f,窗口寄存器为5f,分频数为8
while(1)
{
LED0=1;
}
}
在main函数里通过 LED0 来指示 STM32 是否被复位了,如果被复位了就会点亮 500ms。LED0 用来指示中断喂狗,每次中断喂狗翻转一次。
四、结语
到这里今天的讲解内容就结束了,不知道你对于看门狗以及看门狗的使用有没有理解,如果觉得有不理解的地方欢迎大家在下方评论区留言一起讨论!
-
stm32看门狗时间计算 独立看门狗和窗口看门狗的特性是什么2016-10-10 8763
-
什么是stm32看门狗?独立看门狗和窗口看门狗工作原理解析2017-11-06 27496
-
STM32看门狗配置(独立看门狗IWDG和窗口看门狗WWDG)2017-11-09 8439
-
STM32的看门狗配置详情解说2017-11-13 4459
-
STM32单片机中的独立看门狗与窗口看门狗有哪些不同之处2018-12-10 3386
-
浅谈STM8S_008_WDG独立看门狗和窗口看门狗2020-03-20 5279
-
STM32F1_ WDG看门狗(独立+窗口)2020-04-08 4215
-
stm32看门狗的特点是什么2021-07-22 4055
-
MCU独立看门狗与窗口看门狗的区别2021-10-28 801
-
STM32:独立看门狗、窗口看门狗的配置2022-02-08 1139
-
窗口看门狗是什么?与独立看门狗有啥区别?2022-02-09 994
-
独立看门狗(IWDG)的基础知识2022-10-19 4253
-
STM32中的独立看门狗和窗口看门狗2022-12-22 2146
-
详解独立看门狗的实现原理2022-12-22 3239
全部0条评论

快来发表一下你的评论吧 !
