

如何让机器人学会主动闭环?
机器人
描述
现如今,服务机器人已经融入了各大应用场景,不管是在商场还是在医院、办公楼、餐厅、酒店,我们经常可以看到机器人的身影。
但有时你会碰到机器人走着走着,突然停下来,或是突然来个转弯,不能正确导航带你到达目的地。现在的机器人都这么“坏”的嘛?其实机器人能有什么坏心思呢,它只是需要一张“完美”的地图而已。
一张地图的好坏,直接决定了机器人后续的定位导航能力,那如何建出一张“完美”的地图呢?
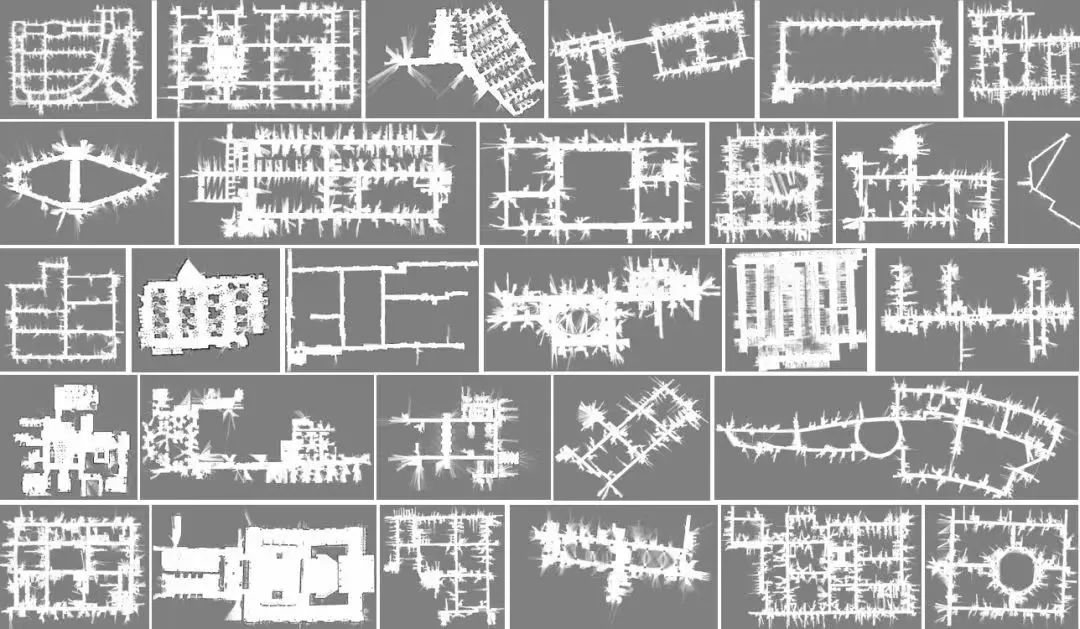
▲思岚机器人建图合集
#01
不管什么地图,首先它得是一张完整的地图。
但很多大场景,比如大型商超,大型体育场等面积太大,对智能机器人的建图性能要求更高,优秀的智能机器人,接受挑战的第一步,就是『大场景』建图。
思岚科技赋能的机器人,最大建图面积可达500m*500m,在临港、青浦两大大型方舱医院稳定运行。对于大场景地图的构建,会遇到很多小问题,建图不闭环就是首要之一,也是一直困扰大家的技术难题。
那如何让机器人学会『主动闭环』呢~
▲思岚机器人建图主动闭环演示
思岚的移动机器人底盘,搭载SLAM 3.0智能导航算法,可以进行主动闭环检测。当发现了新的闭环信息后,还能有效进行闭环后地图的修正,实现更加可靠的环境建图。
这里还有一些建图小技巧,可以帮助你获得更加完善的、闭环的地图~
1►
先小闭环,后大闭环
尽量控制机器人行走形成闭合的小环路,完成小环路的闭合之后,逐步向外围拓展进行地图构建。尽量避免直接尝试较大的环路闭合,若累计误差过大将直接导致闭环失败。
▲累计误差较大导致闭环失败
避免走与当前环路闭环无关的路径,过程中会产生累积误差。这样的话,容易导致环路首尾相差过大,导致无法闭环。
2►
选择特征丰富的点作为闭环点
在建图闭环时,尽量选择激光点丰富的区域作为闭环点,避免选长直走廊等特征相似的点作为闭环点,这类环境容易导致错误闭环。
▲贴近环境明显一侧完成建图闭环
当周围环境特征较弱的时候,尽量将机器人贴近环境明显一侧完成建图。建图时尽量走直线,避免机器人旋转运动而造成画面特征点稀疏。
3►
多走重合之路完善细节
环路回到原点后,保持机器人继续运动,多走重合的路,不要立刻停止移动,在已经完成闭合的路径上,进一步扫图完善细节。
▲进一步完善地图细节
※ 避免在环路闭合前,因追求建图细节进行转圈和往复行走。如果当前的环境特征较少的话,很容易造成闭环失败或者错误。
在玻璃较多的商场环境中,如果在机器人行进的前方有将要路过的相较有特征的环境,如:柱子、左右通道、斜着的墙壁等。可以在合适的位置停下来,然后向着特征位置原地旋转,等雷达扫出了特征环境后再旋转回来继续前进,但旋转的过程中尽量不要后退。
#02
所以,雷达扫描出环境特征也很重要。在完成大场景建图闭环的基础上,思岚经过多年技术升级,借助激光雷达传感器,将机器人自主建图做到了更『精准』
1►
精准检测小物体
即便是肉眼都容易忽略的小物体,思岚的激光雷达都能准确检测到。

思岚底盘搭载的思岚自研激光雷达S2,采样频率高达32K HZ,一秒内进行32000次的测距数据采集,再小的物体也难逃法眼。
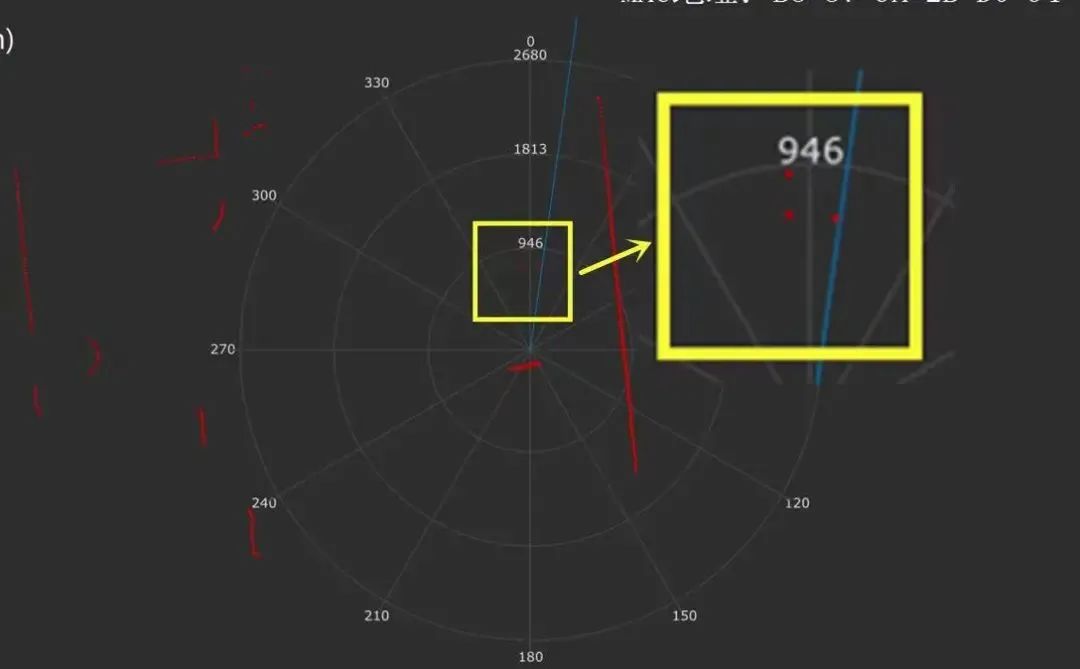
▲ S2,细小物体检测效果
同时,配备2个深度相机系统,将激光雷达和多个视觉传感器完美搭配,360°全方位导航避障,让机器人更稳定精准的建图导航。
2►
精准检测黑色物质
因为机器人建图是靠激光雷达发射光线获取数据,但黑色容易吸收光线导致检测偏差,但现实生活中又会出现很多黑色物体,黑色的扶手,黑色的座椅等等,如果机器人无法检测出这些黑色物体,就会在行走是出现碰撞。
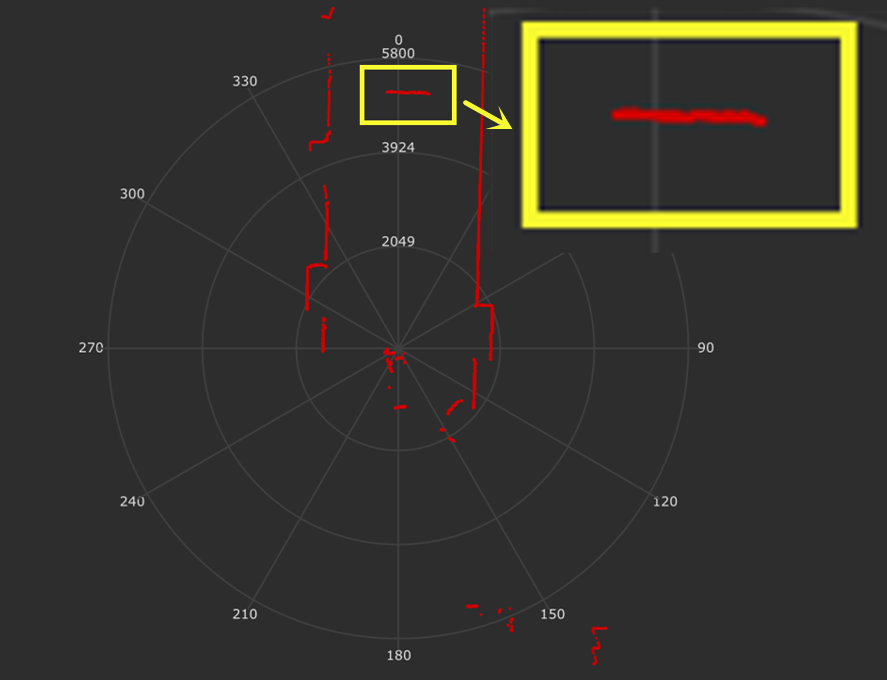
▲ S2 测量黑白物体不分层
思岚移动底盘搭载的自研激光雷达S2可以有效检测出黑色物质;同时,对于高反射物体,比如常见的玻璃、镜子等都是各大场景中不可避免的,S2也能精准检测,帮助机器人实现更精准的定位导航和避障。
通过以上各类指标和数据证明,思岚的机器人移动底盘在帮助机器人自主精细化建图上是不在怕的。基于思岚机器人底盘开发的智能服务机器人,可以拥有一张“完美”的地图,能更好的完成自主定位导航, 那么你曾经遇到的机器人的“坏心思”就不复存在啦。
编辑:黄飞
- 相关推荐
- 机器人
-
【KittenBot机器人试用申请】KittenBot绘图避障机器人学习课程2017-07-07 0
-
【下载】《机器人学、机器视觉与控制――MATLAB算法基础》2018-01-17 0
-
机器人学习相关资料文档!2020-08-25 0
-
已开奖——【送书福利】机器人时代已来!送你几本机器人学硬核好书2020-11-16 0
-
利用Arduino让机器人学会识别标识并作出行为2023-09-27 0
-
机器人学2009-01-14 1278
-
机器人学_熊有伦2015-11-18 653
-
高级机器人学与步行机器人2015-11-20 465
-
机器人学导论——分析、系统及应用2015-11-20 709
-
基础机器人学与宝贝车机器人2015-11-20 491
-
机器人学习算法图解教学2017-09-14 1007
-
在机器人中实现意识及帮助人形机器人学会关心是我们的目标2019-01-17 663
-
机器人学—自动化的辉煌篇章pdf2021-12-10 559
-
机器人学的几何基础(教材资料)2022-04-20 536
全部0条评论

快来发表一下你的评论吧 !
