

运动控制系统设计的两种控制结构解析
工业控制
描述
运动控制往往是针对产品而言的,包含机械、软件、电气等模块,例如机器人、无人机、运动平台等等,是对机械运动部件的位置、速度等进行实时的控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动的一种控制。在运动控制系统的设计中,主要使用了两种控制结构:集中式和分布式。
高速、低成本的数字控制网络的引入,为建造分布式控制系统提供了新的选择。随着具有更高功率、更紧凑的开关放大器的出现,集中化设计使得在同一块印刷威廉希尔官方网站 板上可以布置的控制器数量正在逐步增加。
了解这些技术发展趋势,有助于解释如何以及在什么时候,应用这两种不同的控制结构。
运动控制应用的类型
集中式还是分布式,哪种控制方式更合适:应用控制问题的特性对其具有决定性的影响。
在平面运动控制应用领域,马达的控制或多或少的由集中式PC或控制器完成;也有一些分层应用领域,运动轴被分成2、3组或者更多的功能轴;也有一些单机应用的场合,机床控制器的运行在很大程度上没有与网络连接,不依赖网络的监视。
平面运动控制的例子:具有多个转轴的印刷机,它的转轴受伺服控制器的控制。在这里,时间是关键因素。主控制器,通常是PC或者是PLC,必须同步驱动所有的轴。典型的指令为:“移动轴#1到位置X,移动轴#2到位置Y”等等。
分级运动控制应用的例子:半导体晶圆处理系统,该系统具有一个主机器人(4轴)、晶圆定位器(3轴)和一个阀门控制器(1或2轴)。在这种结构下,网络一般将就地机器人或者阀门控制器连接至中心网络,但是实际的运动控制由就地机器人、晶圆定位器或者阀门完成。总的机器控制器不会发出类似“将机器轴#2移动到位置12345”的指令,而是给出诸如“伸展机械臂”的指令,该指令由就地机器人控制器来解释和执行。
单机应用的例子:磁带存档系统,该系统允许操作人员走近控制台,要求检索特定的磁带。这些单机控制器,能够执行一揽子的机械臂运动,该运动基于就地人员发出的指令,如“检索磁带#1234”。在该应用中,如果连接了网络,那只是用其实现报告和监视功能,并不是用于控制本身。
增加分布式运动驱动器
了解哪些实际设备可以用于运动控制系统同样十分重要。两个可用的设备是:分布式驱动器和运动控制卡。尽管这些设备有很多不同的变体,但是归纳起来,它们都是上述两种设备中的一种。
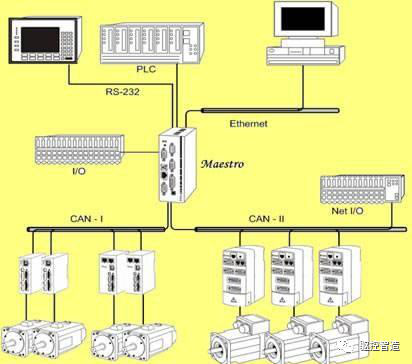
分布式运动控制器驱动器,有时也被称为智能放大器,通过网络与中心主机通讯,提供一套运动控制功能,比如产生轮廓、回路闭合或者是放大功能。
根据应用的不同,有两种分布式驱动可供使用。第一种,可称之为紧耦合驱动,应用诸如SERCOS、EtherCAT、或EthernetPOWERLINK等高速、确定性的网络。第二种,可称之为松耦合驱动,使用诸如以太网协议、CAN总线和RS485等低速网络。
紧耦合驱动需要使用运动卡或者通过PC运行专用软件,来同步和协调各个轴的运动。每个驱动器可接收位置和速度的更新信息,其更新速率可达每秒钟数千次。松耦合驱动也是由主机控制,但是驱动器承担更强大的仿形切削,同时也具有更大的延迟。将类似于“利用点到点S型曲线,将轴移动到位置X”的指令,发送给每个驱动器。这些驱动器内的交互倾向于自动化,利用就地传感器的输入来启动或停止运动。
运动控制卡
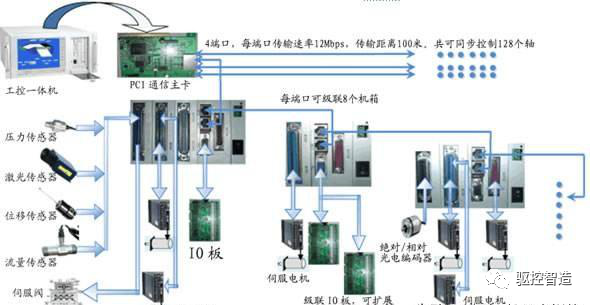
运动控制卡是分布式驱动最主要的替代品。主要区别是:运动控制卡通过背板总线与分散的主板或处理器卡连接起来。但是在这里,我们将单机单卡控制器和背板运动控制卡称为机器控制器卡。
在运动控制器方案中,微处理器中有应用代码,运动控制器IC(运动处理器)用于产生轮廓、伺服回路闭合以及管理轴控制中的对时间要求比较严格的元素。机器应用的微处理器和运动处理器可以为同一个,尤其是对那些简单的控制应用而言。机器控制器卡的优势之一是可维护性更好,这是因为维修整个控制器卡,就是更换卡件。由于放大器布置在卡件上,接线也减少了。还可根据实际应用对卡件的实体尺寸以及接头进行裁剪。
运动控制卡有两种不同的类型:成品的和客户定制的。成品卡,尤其是总线连接的运动卡,存在已经很长时间了,有很多供应商可供选择。客户定制卡,尽管需要更多的设计工作,也是一种很好的选择。有个重要的发展趋势就是将放大器(IC或者基于模块的)集成到卡件上。另外一个趋势是利用基于IC的成品运动控制器,提供轮廓产生、伺服回路闭合、通讯以及时间关键功能,比如自动安全响应、程控中断以及其它类型的自动运动轴管理。
编辑:黄飞
-
怎么设计悬挂运动控制系统?2019-08-12 0
-
什么是运动控制系统2021-09-01 0
-
什么是集散控制系统2021-09-01 0
-
求一种工业运动控制系统方案2021-09-07 0
-
一个基于Platinum Maestro的运动控制系统的软件结构2021-09-14 0
-
运动控制系统的基本方程2021-09-15 0
-
什么是运动控制系统?运动控制系统的任务是什么?2021-10-29 0
-
试验车运动控制系统2009-06-16 477
-
运动控制系统的定义与机电系统运动控制教程分享2017-11-09 1316
-
一种流量比值控制系统设计剖析2019-04-28 3850
-
运动控制系统是什么2023-04-21 1862
-
运动控制系统的核心应用2023-07-07 1986
-
运动控制系统是什么?什么是运动控制系统?2023-10-25 2096
-
运动控制系统由什么组成2024-06-12 1464
-
开环控制系统与闭环控制系统的区别2024-06-13 9608
全部0条评论

快来发表一下你的评论吧 !
